談3D掃描儀在地形測量中的有效應用
2012-10-27 00:46:00殷德耀李健
中國科技信息 2012年11期
殷德耀 李健
河南省有色金屬地質礦產局第三地質大隊 450016
談3D掃描儀在地形測量中的有效應用
殷德耀 李健
河南省有色金屬地質礦產局第三地質大隊 450016
隨著科技的飛速發展,地形測量在工程建設中的作用也愈來愈大。而三維掃描儀高效、快捷的特點在地形測量中得到了廣泛的應用。正是由于地形測量工作的重要性,也說明能否運用好三維掃描儀,將成為決定地形測量工作效果的關鍵因素。本文主要針對三維掃描儀的工作原理及數據處理方法、步驟進行了全面性的探討。
3D激光掃描儀;地形測量;原理;方法
隨著科技的飛速發展,地形測量在工程建設中的作用也愈來愈大。而三維掃描儀高效、快捷的特點在地形測量中得到了廣泛的應用。正是由于地形測量工作的重要性,也說明能否運用好三維掃描儀,將成為決定地形測量工作效果的關鍵因素。
1 3D激光掃描儀的工作原理
3D激光掃描儀主要是在不運用反射棱鏡的情況下,通過自身所有掃描棱鏡進行快速的掃描測距,并能夠使獲得的數據達到較高精度,其獲取信息的過程能夠在最短的時間內完成[1]。主要優勢為:一是僅為其提供一個檢測點,該儀器即可在不接觸檢測物體的情況下,通過快速掃描取得被測物體的所需信息,并能夠使獲取的信息具備相當高的精度及密度,再通過特定的輔助軟件即可獲取該圖形的空間信息;二是該儀器在進行測量的過程中,在無光源情況下,即黑暗條件下,亦可對被測物體展開測量,若有光源的條件下,還能夠同時取得被測物體的色彩值,獲得其三維影像,更加便于虛擬實境的建立。本文主要通過對LMS—X4203D激光掃描儀進行其結構和原理的分析。
1.1 結構解析 為提高3D激光掃描儀的掃描速度,特在LMS—X4203D激光掃描儀中裝入了為其特別設計的探測器;其線掃描主要是運用多面體來進行反射。在運行的過程中,通過控制多棱鏡速度,使其在進行掃描時亦能夠以不同速度進行,同時也可通過不同的角度來對物體進行掃描;按照光學中360度旋轉原理,可對水平面展開全方位的掃面;在獲得長度、角度等信息后,平行數據輸出接口將通過與電腦連接,對其進行處理,獲得所需數據。
1.2 工作原理 LMS—X4203D激光掃描儀主要是通過在一定距離條件下,運用激光技術獲取LIDAR光傳輸時間來進行測量。簡而言之,首先將激光脈沖二極管中發射出的信號通過棱鏡,再經由棱鏡調整到達目標物,其后反射回來的信息將經由探測器獲取信息,并將其記錄下來。(圖1)
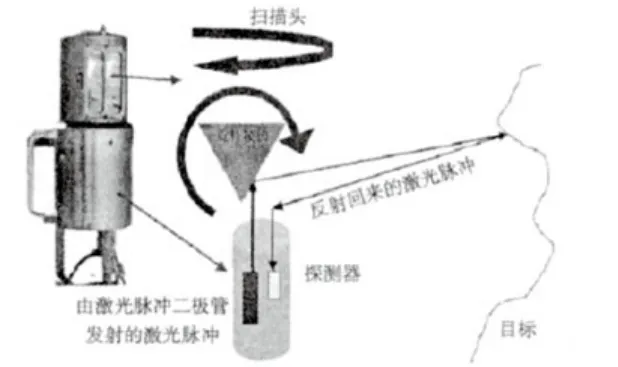
圖1 LMS—X4203D激光掃描工作原理
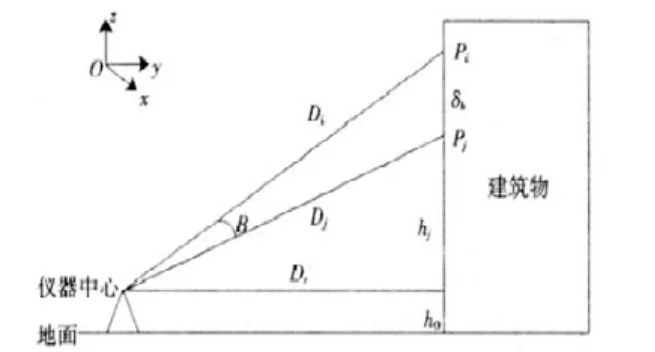
圖2 測量斷面中激光掃描儀到建筑物的垂直距離圖
2 3D數據處理的步驟及方法
經過激光掃描取得的數據主要是被測物體表面分布較為緊密的三維點云,若在進行測量時,被測物由于各種情況,致使掃面不能夠一次性全部觀測,這就需要通過此次檢測來獲得所需數據,后再將多次測量獲得的點云進行整合來獲得信息[2]。在實際操作中,大部分的測量均需通過模型化處理來整理點云數據,并以此來取得所測物體的信息。
2.1 點云聯結
通過不同站點獲得的點云有著各自的坐標系統,因此,點云聯結就是將所獲得的點云數據轉換到同一坐標上來,抑或者通過對其參考坐標進行相對的轉換[3]。就當前而言點云聯結主要為測站后視棱鏡法、曲面匹配法、磁性覘標控制點法和共軛面轉換法四種方法。
2.2.1 共軛面轉換法 操作者通過人為與機器互動的操作,將所重疊的點云集中到平面上來,其后再找出3個或以上共軛面,注意該面均在不平行面上,再通過將共軛面上的坐標進行轉換。該方法在觀測的過程中,不需要通過其他任何步標或測量來開展,但在共同的觀測范圍內必須具備3個或以上共軛面,再進行轉換。
2.2.2 磁性覘標控制點法 通過在測站重疊的范圍內,并放置覘標來作為測量的控制點,就可以通過覘標的特性進行反射并自動找到控制點。在獲得三個或以上數量的控制點后,就可通過轉換得到相連測站的數據。
2.2.3 測站后視棱鏡法 當激光掃描儀在經由棱鏡時,會出現較強的反射情況,但還屬于辨識范圍內,為此需要建立起三維關系,將測站與棱鏡兩者連接起來。簡而言之,在獲得棱鏡與測站的坐標數據時,通過將測量到的點云數據與地面坐標進行相互轉換。在定位測量時,通常情況運用全站儀來進行,也會運用全球定位系統來進行測量。
2.2.4 曲面匹配法 在觀測表現起伏的物體時,可將重疊的點云數據,經過曲面匹配的方式取得信息。但由于目前的曲面匹配理論還沒有能夠完全實現自動化,因此,需要通人工對其進行近似匹配操作,才能使結果達到最理想的效果。
2.2 特征線的提取 獲取離散點挖掘過程中線性信息的方法非常多,線性回歸、HOUGH交換等均屬于方法之一。在對建筑物進行信息挖掘時,主要方法為:
2.2.1 對掃描儀測量的建筑物的數據進行計算(圖2),掃描線能夠與建筑物處在同一層面并形成了ΔOPiPj,該三角形的變長分別為Di、Dj,其已知夾角為B。圖中所有形成的三角形均可通過計算得到其垂直距離,其簡稱為偽距。
在較為理想的情況下,若處在同一斷面上,那么其偽距多數是相等的,并能夠顯示出掃描儀到建筑物這兩者之間的距離,但在實際操作過程中,不可避免地存在一些差距,這就需要操作人員進行人為的判斷,再通過計算獲得垂足點。
2.2.2 糾正激光測量斷面,使整體結果更加匹配。首先將獲得的全部垂足點按照相應順序進行連接,再運用曲線擬合的方法計算出曲線上的曲線點,其后通過探測曲線點,獲得被測物體的形體特點,最后將特征點進行整合,通過直線擬合及形體信息挖掘,獲得建筑物二維平面特征所需的點線。
2.2.3 通過重復以上步驟,將獲取的所有數據信息進行分析處理。
2.2.4 在進行第二次重復計算時,主要針對存在疑問點進行處理,并取得最后的特征點。其后再通過將各特征點進行原始觀測值的劃分,并根據擬合得出的結果對原始觀測點中的距離值進行完善。
2.3 三維數據的獲取
在獲得最終糾正信息后,再對原始數據進行重新采樣,就可獲取觀測物的三維坐標。主要計算方法為:已知值為激光掃描儀與觀測物之間的垂直距離,在獲得已知值后按照二維平面信息,通過對原始數據重新進行整理計算。相較于坐標概算重采樣主要注重建筑物整體特征,同時對測量數據也更加注重整體匹配和糾正,達到改善誤差的效果[4]。
2.4 點云模型化
通過以上計算方法,最終能夠獲得三維重采樣點,并將數據直接運用到三維建模中來。地形表面建模主要為基于點的建模方法、基于三角形的建模方法、基于格網的建模方法和將其中任意兩種結合起來的混合建模方法四大方法。
3 結語
總而言之,由于三維激光掃描儀在地形測量中的作用重大,因此掌握其工作原理,能夠有效幫助快速掌握其操作方法,其后再結合數據處理方法,能使其在地形測量中更加快捷高效地測繪圖形。
[1] 原玉磊. 三維激光掃描應用技術研究[D].解放軍信息工程大學, 2009 .
[2] 顧斌,董杰,董妍. 探討三維激光掃描技術的應用[J]. 科技風, 2010,(03) .
[3] 趙曉明, 洪波. 三維激光掃描儀應用技術研究[J]. 價值工程, 2010,(09) .
[4] 趙保國, 苗云鵬. 3D激光掃描儀在河口村壩址地形圖測繪中的應用[J]. 測繪與空間地理信息, 2009,(04)
10.3969/j.issn.1001-8972.2012.11.008
猜你喜歡
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2016年2期)2016-03-22 02:42:52
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
