多功能智能車(chē)的論證與設(shè)計(jì)
2012-10-27 02:39:36高華磊遲雨杰張少飛裴文龍
中國(guó)科技信息 2012年11期
高華磊 遲雨杰 張少飛 裴文龍
中北大學(xué),山西 太原 030051
多功能智能車(chē)的論證與設(shè)計(jì)
高華磊 遲雨杰 張少飛 裴文龍
中北大學(xué),山西 太原 030051
以STC89C52單片機(jī)為智能小車(chē)的控制核心,采用紅外收發(fā)管對(duì)跑道路線(xiàn)進(jìn)行檢測(cè)和識(shí)別,電機(jī)驅(qū)動(dòng)采用L298驅(qū)動(dòng)芯片, 驅(qū)動(dòng)電機(jī)從而控制小車(chē)前進(jìn)及轉(zhuǎn)向,采用充電鋰電池作為整個(gè)系統(tǒng)的供電電源。紅外收發(fā)管通過(guò)電壓比較器將檢測(cè)信號(hào)送入單片機(jī),單片機(jī)通過(guò)不同紅外收發(fā)管的信號(hào)作出不同的判斷,并控制電機(jī)完成小車(chē)前進(jìn)、避障、轉(zhuǎn)彎、超車(chē)等相應(yīng)的動(dòng)作,本車(chē)也加入了無(wú)線(xiàn)收發(fā)模塊,可以通過(guò)遙控器,手動(dòng)控制車(chē)輛行進(jìn)等姿態(tài),本設(shè)計(jì)線(xiàn)路簡(jiǎn)單,成本低。
單片機(jī)控制;紅外收發(fā)管;無(wú)線(xiàn)收發(fā)模塊電路;智能小車(chē)
MCU control;infrarterad nsmit-receitvue be;Wireless send-receive circuit;Intelligent car
引言
如今關(guān)于電子設(shè)計(jì)的比賽項(xiàng)目越來(lái)越多,很多比賽采用模型車(chē)去完成相應(yīng)的比賽任務(wù)和要求,而由于競(jìng)賽的科技性加之娛樂(lè)性,引起了很多電子愛(ài)好者的情趣,尤其是在校大學(xué)生。因此,本文設(shè)計(jì)了一種多功能智能小車(chē),可以良好的實(shí)現(xiàn)循跡、壁障、遙控、顯示等功能,方便用戶(hù)的二次開(kāi)發(fā)和學(xué)習(xí)。
1 系統(tǒng)方案
本系統(tǒng)主要由單片機(jī)最小系統(tǒng)模塊、直流電機(jī)驅(qū)動(dòng)模塊、紅外光檢測(cè)模塊、無(wú)線(xiàn)收發(fā)模塊、鋰電池模塊組成。
1.1 主控制器的論證與選擇
方案一:采用FPGA控制方案。FPGA內(nèi)部具有獨(dú)立的I/O接口和邏輯單元,還具有速度快、外圍電路較少和集成度高的特點(diǎn),因此特別適用于復(fù)雜的邏輯電路設(shè)計(jì)。但是FPGA的成本高,而且由于本設(shè)計(jì)對(duì)輸出的速度要求不高,所以FPGA高速處理的優(yōu)勢(shì)得不到充分體現(xiàn)。
方案二:采用STC89C52單片機(jī)作為系統(tǒng)的控制器軟件編程靈活,可用軟件較簡(jiǎn)單地實(shí)現(xiàn)各種算法和邏輯控制,并且由于其成本低、體積小、技術(shù)成熟和功耗小等優(yōu)點(diǎn),技術(shù)比較成熟,開(kāi)發(fā)過(guò)程中可以利用的資源和工具豐富。
綜合以上兩種方案,選擇方案二。
1.2 電機(jī)與驅(qū)動(dòng)的論證與選擇
方案一:采用步進(jìn)電機(jī)作為小車(chē)的動(dòng)力源。步進(jìn)電機(jī)是一種將電脈沖信號(hào)轉(zhuǎn)換成角位移或線(xiàn)位移的開(kāi)環(huán)控制元件,可在各種數(shù)控系統(tǒng)中作為執(zhí)行元件。但步進(jìn)電機(jī)用于小車(chē)功耗高且需要相應(yīng)的硬件驅(qū)動(dòng)。
方案二:采用直流電機(jī)作為小車(chē)的動(dòng)力源。直流電機(jī)具有優(yōu)良的調(diào)速特性,能承受頻繁的沖擊負(fù)載,可實(shí)現(xiàn)頻繁的無(wú)級(jí)快速啟動(dòng)、制動(dòng)和反轉(zhuǎn)。直流電機(jī)的驅(qū)動(dòng)電路簡(jiǎn)單,可使用L298N驅(qū)動(dòng)。本設(shè)計(jì)用到兩個(gè)直流電機(jī),可以實(shí)現(xiàn)系統(tǒng)需求且成本低。
綜合以上兩種方案,直流電機(jī)控制小車(chē)轉(zhuǎn)角精度足以滿(mǎn)足題目要求,選擇方案二。
1.3 檢測(cè)系統(tǒng)的論證與選擇
方案一:采用光敏電阻對(duì)黑線(xiàn)判斷。光敏電阻光照性為非線(xiàn)性、反應(yīng)靈敏度一般,檢測(cè)距離范圍有限,其受外部影響較大,檢測(cè)信號(hào)易出現(xiàn)誤差。
方案二:采用激光收發(fā)管對(duì)黑線(xiàn)判斷。激光收發(fā)管線(xiàn)性度好、反應(yīng),其受外部影響很小。但對(duì)黑線(xiàn)判斷需要黑白對(duì)比度高,成本相對(duì)較高,要求較嚴(yán)格。
方案三:采用紅外收發(fā)管對(duì)黑線(xiàn)判斷。紅外收發(fā)管線(xiàn)性度一般,反應(yīng)較快,檢測(cè)范圍一般,受外部影響不大,對(duì)黑線(xiàn)判斷可通過(guò)調(diào)節(jié)來(lái)改變黑白對(duì)比度不同的靈敏度,成本低廉效果好。
綜合考慮采用方案三紅外收發(fā)管作為檢測(cè)系統(tǒng)對(duì)黑線(xiàn)判斷。
2 系統(tǒng)理論分析與計(jì)算
2.1 智能小車(chē)控制系統(tǒng)
智能小車(chē)控制系統(tǒng)一般可看作自動(dòng)引導(dǎo)系統(tǒng),使得智能小車(chē)跟隨道路的變化而運(yùn)行,另一方面,智能小車(chē)在走直線(xiàn)或弧形線(xiàn)時(shí),也可以看作一個(gè)恒值調(diào)節(jié)系統(tǒng),能夠跟隨道路變化而更加平穩(wěn)快速的運(yùn)行。在設(shè)計(jì)控制算法時(shí),要既能滿(mǎn)足跟隨系統(tǒng)的動(dòng)態(tài)特性,同時(shí)又能滿(mǎn)足恒值調(diào)節(jié)的穩(wěn)定特性。
2.2 智能小車(chē)轉(zhuǎn)向和速度的控制
控制模型車(chē)的轉(zhuǎn)向和速度,使其能夠跟隨道路的變化來(lái)運(yùn)行。實(shí)現(xiàn)這一目標(biāo)有兩個(gè)難點(diǎn):一是各種外界干擾因素作用于系統(tǒng),從而影響被控對(duì)象偏離控制規(guī)律,例如道路變化、檢測(cè)信號(hào)的噪聲和電池電壓不穩(wěn)定等;二是車(chē)體自身的慣性影響使得被控量變化不能夠靈活自如。
3 電路與程序設(shè)計(jì)
3.1 電路的設(shè)計(jì)
3.1.1 系統(tǒng)總體框圖
系統(tǒng)總體框圖如圖1所示。小車(chē)以STC89C52單片機(jī)作為系統(tǒng)核心,按鍵切換程序用來(lái)檢測(cè)運(yùn)行不同的程序,紅外收發(fā)管判斷出黑線(xiàn)并產(chǎn)生低電平給單片機(jī)來(lái)確定小車(chē)的運(yùn)行,
3.1.2 紅外檢測(cè)子系統(tǒng)
紅外收發(fā)子系統(tǒng)原理圖,如圖2所示。
3.1.3 電源
電源由7.4V鋰電池提供,通過(guò)L7805三端穩(wěn)壓管輸出5 V為單片機(jī)系統(tǒng)、L298芯片、無(wú)線(xiàn)通信模塊供電,通過(guò)L7806三端穩(wěn)壓管輸出6V給L298N為直流電機(jī)供電。
3.2 程序設(shè)計(jì)
3.2.1 程序功能描述與設(shè)計(jì)思路
(1)程序功能描述:根據(jù)題目要求,軟件部分主要實(shí)現(xiàn)小車(chē)的轉(zhuǎn)彎和調(diào)速。①小車(chē)轉(zhuǎn)彎功能:設(shè)置小車(chē)一側(cè)車(chē)輪速度大于另一次車(chē)輪速度實(shí)現(xiàn)轉(zhuǎn)彎; ②小車(chē)調(diào)速功能:設(shè)置PWM的不同值驅(qū)動(dòng)小車(chē)變速。
(2)程序設(shè)計(jì)思路:小車(chē)左側(cè)傳感器檢測(cè)到黑線(xiàn)左輪全速,右輪低速,實(shí)現(xiàn)右轉(zhuǎn);右側(cè)檢測(cè)到黑線(xiàn)左輪低速,右輪全速,實(shí)現(xiàn)左轉(zhuǎn)。
3.2.2 程序流程圖
主程序流程圖如圖3所示。
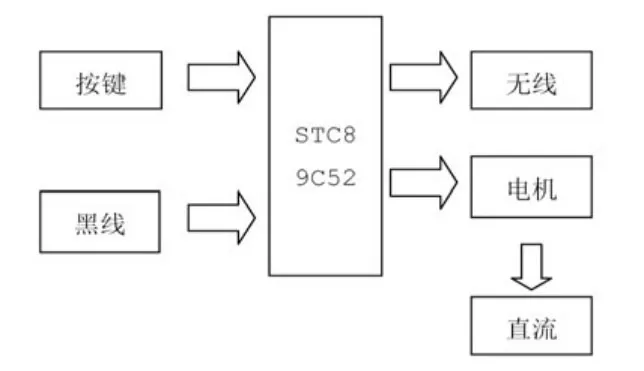
圖1 系統(tǒng)總體框圖
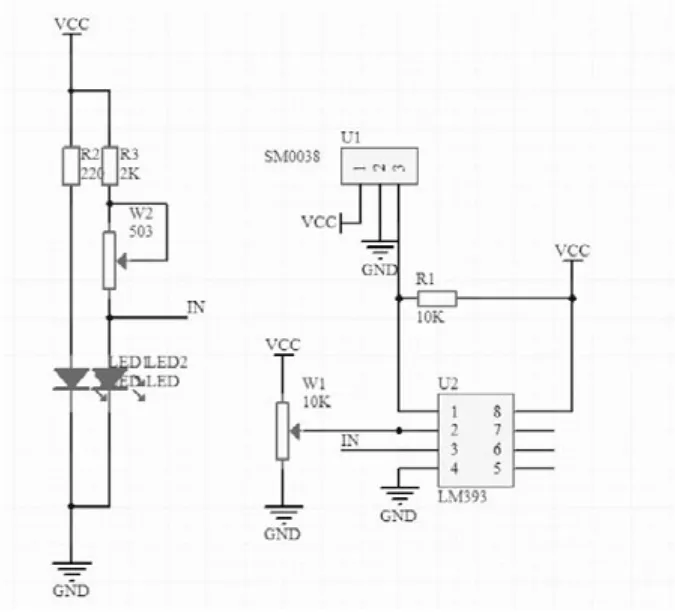
圖2 紅外收發(fā)子系統(tǒng)原理圖
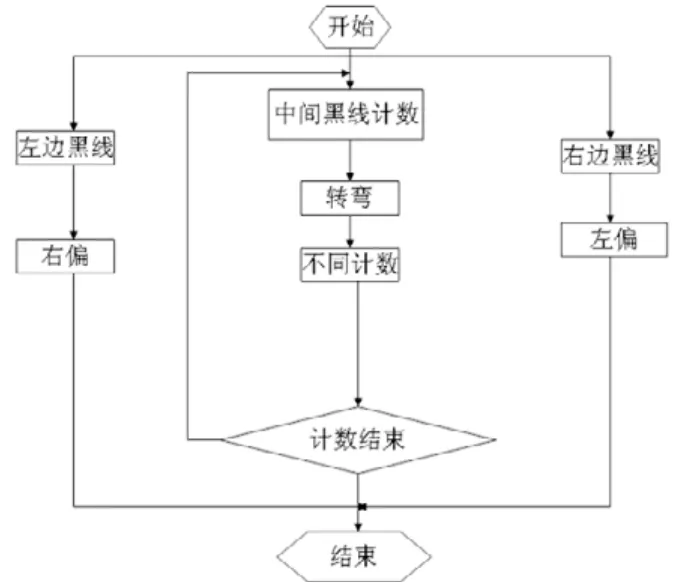
圖3
4 結(jié)語(yǔ)
本文介紹了以STC89C52單片機(jī)為核心的智能車(chē)的論證與設(shè)計(jì),采用單片機(jī)控制外圍傳感器和驅(qū)動(dòng)電路,結(jié)構(gòu)模塊化,穩(wěn)定性好,相應(yīng)的軟件設(shè)計(jì)簡(jiǎn)單,易于對(duì)硬件車(chē)體進(jìn)行控制。通過(guò)測(cè)試,此多功能智能車(chē)能夠很好的實(shí)現(xiàn)循跡、壁障、遙控等功能。
[1]郭天祥. 新概念51單片機(jī)C語(yǔ)言教程 [M].北京 :電子工業(yè)出版社,2009.
[2]丁元杰. 單片微機(jī)原理與應(yīng)用 [M]. 第2版.北京: 機(jī)械工業(yè)出版社,2003.
[3]畢滿(mǎn)清. 模擬電子技術(shù)基礎(chǔ)[M].北京:電子工業(yè)出版社,2008.
[4]韓炎.數(shù)字電子技術(shù)基礎(chǔ),[M].北京:電子工業(yè)出版社,2009
The designi s based on STC89C52 microcontr oller core of the control of the smart car, the infrared transceivetr ube detectiona nd recognitiomn, oto r driver using L298 driver chip on the runwayl ine, the drive motor to controtl he car forward and turningt, he use of rechargeablilte hiumb atteries as the entire system for power supply. The infrare d transceiver tube detection signal microcontroller IO port pass throught he microcontroltlehre, microcontr oller to make differentj udgmenbts y differenti nfrare d transceivetr ube signal and controtl he motor to complette he car forward, obstacle avoidan ce, corneringo, vertakinga nd other appropriaatec tion , the car also joined wirelests ransceiver moduley, ou can by remotec ontrol, manuacl ontrol of the vehicle in motionp, osturet, he lines of the designi s simple, low cost.
高華磊(1990-),男,山東日照人,在讀本科生。
10.3969/j.issn.1001-8972.2012.11.095
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
