車載視頻監控系統的研究與實現
2012-10-27 06:35:04陳洪太周淵平鄧昌明
通信技術 2012年3期
陳洪太, 周淵平, 鄧昌明
(四川大學 電子信息學院,四川 成都 610064)
0 引言
近些年來,隨著中國經濟的不斷發展,越來越多的人開始購買私人車、私家車,隨之帶來很多交通問題,交通阻塞、擁擠、汽車之間的碰撞刮擦在所難免。同時,汽車駕駛員的行車水平更是參差不齊,安全隱患很大。在人員擁擠或者道路角落狹窄的場所,比如車庫、街道、停車場、人行道附近,駕駛員既要前瞻,又要顧后,稍有不慎,便會發生刮擦碰撞事故,給人民的生命財產帶來很大損失[1]。
本文系統的提出,就是要嘗試解決這些問題。既要檢測行車時的視線盲區,又要檢測周圍物體與汽車的距離等,及時提醒駕駛員可能存在的潛在危險,提前有意識躲避,給行車帶來很大的安全便利。
1 汽車盲區
所謂的汽車盲區,就是駕駛員在車內無法用肉眼看到的區域,也是汽車最容易出現事故的區域。現有的汽車,一般是在汽車前端兩側安裝2個后視鏡,以此觀察車體兩側及偏后方的物體。車內安裝有后視鏡,駕駛員大致可以通過它觀測到車體后面的物體。僅靠3面鏡子,駕駛員很難觀測到汽車周圍的全部環境,由此就會產生很多盲區,帶來潛在危險。
汽車盲區如圖1灰色部分所示。
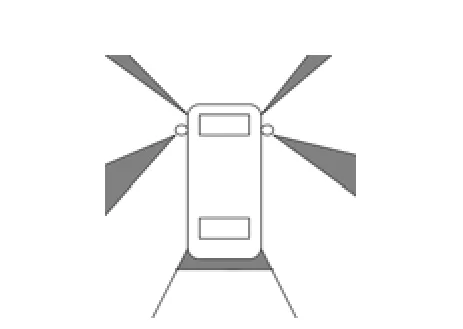
圖1 汽車盲區示意
2 系統硬件設計方案
2.1 系統整體方案
該系統主要采用在汽車盲區安裝攝像頭的方法消除盲區,比如,在汽車左前方、右前方以及車尾后面分別安裝監控攝像頭,配合距離測試模塊,及時檢測距離汽車最近物體的位置,系統將各路視頻信號及距離信息呈現在顯示器上,提醒司機潛在危險,進行有意識規避[2]。駕駛員既可以手動選擇顯示哪一路視頻信號,也可以讓距離信號作為控制信號,進行自動視頻切換,在這種情況下,顯示器顯示的是物體離汽車最近位置的攝像頭的圖像(也即最有價值的圖像)。整個系統的硬件框圖如圖2所示。
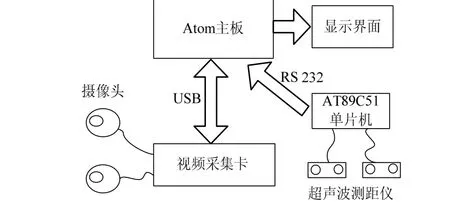
圖2 系統硬件框
2.2 視頻采集部分
該系統采用380線監控攝像頭208C,有效測量距離可達10 m,電源為 DC 8 V,有效像素:PAL:512×582,NTSC:512×494,基本上可以滿足要求。
視頻采集卡采用同三維T301系列,它是一款專業的USB接口高清晰視頻采集設備,通過Video端子或S端子來接入視頻,四路視頻輸入可以在各路中切換瀏覽。
2.3 超聲波測距模塊
HY-SRF05超聲波測距模塊可以提供2~450 cm的非接觸式距離感測功能,測距精度可達3 mm;模塊包括超聲波發射器、接收器及控制電路[3]。
基本工作原理如下:①采用IO口的Trig端觸發測距需要至少10 us的高電平信號;②模塊自動發送8個40 kHz的方波,自動檢測是否有信號返回;③當有信號返回時,通過IO口的Echo端輸出一個高電平,高電平持續的時間就是超聲波從發射到返回的時間。
測量的距離=(高電平時間×340)/2。
2.4 系統控制以及顯示部分
超聲波測距模塊的控制信號由51單片機的IO口提供,采用外部中斷、定時中斷方式對檢測到的返回信號進行處理,計算出距離,在數碼管上顯示出來。同時,通過RS232串口,將各路距離信號發送給Atom主板。
Atom主板一方面讀視頻采集卡信號,通過VisualC++生成的界面顯示出攝像頭端的影像,同時處理各路距離信號,一并顯示在圖形界面上。
3 系統軟件設計以及仿真
3.1 單片機程序設計部分
單片機對超聲波測距模塊的控制以及距離信號的處理如圖3所示。在對TCON、TMOD、SCON等串口、定時器寄存器初始化后,單片機從IO口輸出一高電平信號,觸發測距模塊的Trig端,使其開始工作。測距模塊在定時器溢出范圍內,如果檢測到Echo回響信號變為高電平,則定時器開始計時,同時開啟外部中斷。高電平的持續時間,就是超聲波從發射到接收的時間間隔。Echo信號變低后,觸發外部中斷,在中斷響應程序中,對定時器進行清零,計算超聲波測量的距離并進行LED顯示。如果在一定時間范圍內,檢測不到Echo信號變高,則定時器溢出,在溢出中斷程序中,對定時器進行清零,重新開始距離檢測[4]。
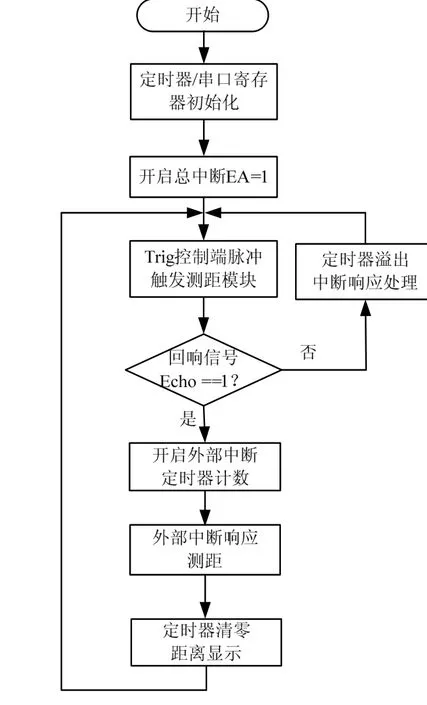
圖3 單片機測距流程
3.2 基于MFC的對話框顯示界面
利用VisualC++的MFC類庫,創建基于對話框的工程,將攝像頭視頻信號顯示在圖像控件上。視頻信號的切換是個核心部分。從串口獲取距離信號,一般來說有3種方法:
1)利用Windows API函數實現串口編程。這種方法具有很強的靈活性,但需要用戶詳細了解串口程序開發過程和一些復雜的API函數。在Windows系統中,串口和其他通信設備是作為文件處理的。
2)多線程串口編程 CSerialPort類。其工作流程如下:首先設置好串口參數,再打開串口監測工作線程,檢測到串口事件后,以PostMessage(hWnd, Msg,wParam, lParam)消息通知主程序,激發消息處理函數RecvSCCMsg(wParam, lParam)來進行數據處理[5]。
3)用MSComm控件進行串口通信。它是微軟提供的Windows環境下實現串行通信的ActiveX控件,通過添加MSComm控件ID的控制變量以及串口事件的消息處理函數OnComm( )函數,編寫處理代碼。
3.3 測試結果
將硬件系統搭建好后,開啟VC生成的視頻監控程序,測試結果如圖4所示。
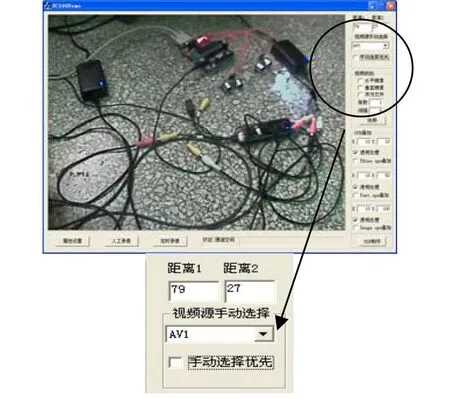
圖4 距離信號控制視頻切換
該系統以兩路視頻信號輸入和兩路測距信號輸入為基礎,當手動選擇優先時,距離信號不影響視頻源的選取。反之,取消手動選擇優先,則窗口顯示的是最近的距離信號所在位置的攝像頭的信息。從結果可以看出,取消手動優先選項,距離2小于距離1,視頻顯示的是線路2的攝像頭信息。
4 結語
本文設計的車載視頻監控系統,能夠較好地完成從距離信號讀取到視頻自動切換的過程,具有一定的應用前景。在后面的研究中,加上GPS模塊以及多個視頻窗的同時顯示,配合視頻圖像的手機傳輸,語音信號報警裝置,可以實現汽車的定位以及防盜,對行車安全等都有一定的現實意義。
[1]郭源源.視頻監控技術的研究[J].科技資訊, 2009(34): 234-235.
[2]劉文怡, 楊慧.基于DSP和以太網的視頻監控系統的設計與實現[J].通信技術, 2009,42(07): 151-153.
[3]趙旭.超聲波測距儀硬件的研究設計[J].才智,2011(23):189-191.
[4]莊益強, 余輪.基于DM642的 X264視頻監控系統的軟件實現[J].通信技術, 2007,40(12): 394-395.
[5]龔建偉, 熊光明.VisualC++/Turbo C串口通信編程實踐[M].第2版,北京:電子工業出版社, 2007: 27-174.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
汽車與安全(2019年9期)2019-11-22 09:48:03
中國生殖健康(2019年3期)2019-02-01 06:12:26
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
決策探索(2014年21期)2014-11-25 12:29:50
環球時報(2010-02-11)2010-02-11 13:34:15
