噴水推進(jìn)自動(dòng)化監(jiān)控系統(tǒng)故障自診斷技術(shù)研究
2012-10-30 08:12:08陳天平曹士杰
船舶與海洋工程 2012年4期
袁 木,陳天平,曹士杰
(711研究所,上海 201108)
0 引 言
近年來,隨著造船技術(shù)的快速發(fā)展,很多新型高速船舶安裝了噴水推進(jìn)裝置。作為一種特殊的推進(jìn)方式,噴水推進(jìn)有別于傳統(tǒng)的螺旋槳推進(jìn)方式,具有推進(jìn)效率高;抗空泡能力強(qiáng);操縱性能優(yōu)異;工作平穩(wěn)、噪聲低;適應(yīng)變工況能力強(qiáng)、主機(jī)不易過載;適用于高性能船舶的性能和特點(diǎn)。
船舶的運(yùn)動(dòng)推力是通過噴水泵噴水的反作用力來獲得的,并通過操作方向舵來實(shí)現(xiàn)轉(zhuǎn)向運(yùn)動(dòng),通過操作倒航斗來實(shí)現(xiàn)前進(jìn)和后退[1]。典型的噴水泵見圖1。

圖1 噴水泵
噴水推進(jìn)裝置通常由進(jìn)口流道、推進(jìn)泵、操舵倒航機(jī)構(gòu)、液壓系統(tǒng)和控制系統(tǒng)5部分組成。噴水推進(jìn)自動(dòng)監(jiān)控系統(tǒng)安全可靠地應(yīng)用,并對出現(xiàn)的故障能夠及時(shí)準(zhǔn)確地進(jìn)行診斷[2]是實(shí)現(xiàn)控制功能的重要保障。
船舶故障自診斷技術(shù)可以分為兩大部分,一是設(shè)備故障和異常停機(jī)時(shí),快速、準(zhǔn)確地找到故障點(diǎn),分析故障原因,排除故障,恢復(fù)正常運(yùn)行。二是在船舶運(yùn)行中,對關(guān)鍵設(shè)備的狀態(tài)和零件的參數(shù)進(jìn)行實(shí)時(shí)監(jiān)測,根據(jù)參數(shù)的變化趨勢,分析可能出現(xiàn)的問題,為采取防范措施提供依據(jù)。
結(jié)合故障自診斷技術(shù)和船舶自動(dòng)化監(jiān)控系統(tǒng)的特點(diǎn),設(shè)計(jì)出基于總線控制技術(shù)的噴水推進(jìn)自動(dòng)化監(jiān)控系統(tǒng)故障自診斷系統(tǒng),該系統(tǒng)可以對噴水推進(jìn)裝置的運(yùn)行狀態(tài)進(jìn)行在線監(jiān)測,實(shí)時(shí)反饋故障報(bào)警,并根據(jù)故障的類型和發(fā)生的頻率,提出設(shè)備的檢修和維護(hù)建議。同時(shí)還可以根據(jù)系統(tǒng)存在的安全隱患,提前發(fā)出故障預(yù)警,減少突發(fā)事故,降低后期的維護(hù)成本。
1 噴水推進(jìn)自動(dòng)化監(jiān)控系統(tǒng)
該系統(tǒng)以高速雙體船為設(shè)計(jì)對象,在船左右側(cè)體都配有獨(dú)立的噴水推進(jìn)裝置,其系統(tǒng)見圖2。

圖2 噴水推進(jìn)系統(tǒng)
系統(tǒng)的控制對象是噴水推進(jìn)裝置內(nèi)的方向舵和倒航斗,方向舵控制船的左右轉(zhuǎn)向,倒航斗控制船的前進(jìn)和后退。其控制部件電磁閥位于泵艙內(nèi),通過控制電磁閥的開關(guān)來通斷液壓裝置,驅(qū)動(dòng)方向舵和倒航斗動(dòng)作,達(dá)到控制整船運(yùn)動(dòng)的目的。
控制系統(tǒng)的核心功能分為3大部分:主站、左從站和右從站,站與站之間通過CAN總線進(jìn)行數(shù)據(jù)冗余通訊。
主站裝配在駕駛室控制臺內(nèi),用于采集和處理來自操縱單元和控制單元的信號,控制臺面上安裝有方向舵和倒航斗指示儀表、主機(jī)轉(zhuǎn)速指示表、報(bào)警指示、兩只手柄、一只手輪、控制選擇板、備用控制板、離合器控制板等。
左從站、右從站分別裝配在左舷泵艙和右舷泵艙內(nèi),通過比例放大板的電流輸出控制電磁閥,電磁閥打開液壓裝置驅(qū)動(dòng)方向舵和倒航斗。方向舵和倒航斗的位置傳感器可以實(shí)時(shí)將舵和斗的位置反饋到從站內(nèi)。
故障自診斷數(shù)據(jù)檢測器通過主站和整個(gè)系統(tǒng)相連,通過總線進(jìn)行數(shù)據(jù)的傳輸和監(jiān)測,可以對發(fā)生的故障進(jìn)行實(shí)時(shí)報(bào)警,也可以對潛在的故障進(jìn)行預(yù)警。
2 故障自診斷技術(shù)的應(yīng)用
針對控制對象的特點(diǎn),便于操作人員理解和應(yīng)用,將故障類型分為兩大部分,即系統(tǒng)報(bào)警和控制故障報(bào)警。
系統(tǒng)報(bào)警主要是指當(dāng)系統(tǒng)出現(xiàn)安全隱患,但不影響系統(tǒng)對船的控制,還可以進(jìn)行正常的船舶操縱,此時(shí)可以暫時(shí)不去處理,等船舶停止運(yùn)行或靠岸時(shí)再處理。
控制故障報(bào)警是指系統(tǒng)出現(xiàn)失控,已經(jīng)無法對控制對象進(jìn)行操縱,必須查明原因并及時(shí)排除故障的情況。
故障自診斷檢測器實(shí)時(shí)監(jiān)測的重要報(bào)警點(diǎn),如方向舵、倒航斗位置,手柄、手輪位置,總線傳輸?shù)榷歼h(yuǎn)程傳輸?shù)娇刂婆_上的報(bào)警板,當(dāng)檢測的報(bào)警點(diǎn)出現(xiàn)異常時(shí),以指示燈發(fā)光,喇叭發(fā)聲的方式提醒駕駛員。故障自診斷檢測器將監(jiān)測到的故障以故障碼的形式存儲在計(jì)算機(jī)的存儲器中,維修查詢時(shí),以一定的方式讀出故障代碼,進(jìn)行故障的后期處理。故障類型分類見圖3。

圖3 故障類型分類流程
2.1 總線網(wǎng)絡(luò)的自診斷
總線自診斷功能不僅可以對接收的數(shù)據(jù)實(shí)時(shí)監(jiān)測,也可以對自身的故障發(fā)出報(bào)警。
系統(tǒng)采用雙冗余CAN網(wǎng)絡(luò),主要的網(wǎng)絡(luò)節(jié)點(diǎn)有,主站、左從站、右從站、故障自診斷檢測器等。主站負(fù)責(zé)對駕駛室控制臺內(nèi)的手輪和手柄等控制信號進(jìn)行處理,從站負(fù)責(zé)對方向舵和倒航斗的控制電磁閥和反饋位置等進(jìn)行處理,故障自診斷檢測器主要負(fù)責(zé)故障信號的集中反饋和處理。主站將控制命令信號通過總線傳到對應(yīng)的從站,從站將反饋的位置信號通過總線傳到主站,總線構(gòu)建了數(shù)據(jù)傳輸?shù)耐ǖ馈?/p>
當(dāng)雙 CAN總線中有一路發(fā)生數(shù)據(jù)通訊故障時(shí),故障自診斷檢測器發(fā)出系統(tǒng)故障報(bào)警,另外一路正常工作的總線將承擔(dān)數(shù)據(jù)傳輸?shù)娜蝿?wù),不影響對船舶的控制。當(dāng)雙總線同時(shí)無法通訊時(shí),故障自診斷檢測器發(fā)出控制故障報(bào)警,此時(shí)主站和從站之間已經(jīng)無法進(jìn)行正常的數(shù)據(jù)通訊,控制命令無法通過總線傳到從站,船舶將失去控制[3]。
2.2 手柄和手輪的故障自診斷
手輪和手柄位于駕駛室的控制臺上,對方向舵的控制范圍為左滿舵到右滿舵,手輪和手柄通過內(nèi)部轉(zhuǎn)化電路,可輸出最大范圍為0~10V的控制電壓,主站內(nèi)的AD數(shù)據(jù)采集模塊到手柄和手輪的控制電壓后,通過CPU(中央處理器)模塊轉(zhuǎn)換為對應(yīng)的數(shù)字量,再通過總線將采集到的數(shù)據(jù)傳輸?shù)綇恼荆蓮恼緝?nèi)的驅(qū)動(dòng)程序來完成控制命令。
將左滿舵對應(yīng)的電壓值設(shè)定為2.5V,右滿舵對應(yīng)的電壓設(shè)定為7.5V,當(dāng)主站采集到2.5~7.5V之間的電壓值時(shí),認(rèn)定為正常采集值。超出2.5~7.5V范圍,但是還在0~10V內(nèi)的電壓值認(rèn)定為危險(xiǎn)值,發(fā)出系統(tǒng)報(bào)警,當(dāng)數(shù)值在0~10V之外時(shí),發(fā)出控制故障報(bào)警。
2.3 方向舵和倒航斗的反饋位置故障自診斷
當(dāng)監(jiān)測對象正常工作時(shí),對應(yīng)的傳感器的輸入和輸出都有一定的工作范圍。當(dāng)傳感器出現(xiàn)故障時(shí),信號的電壓范圍超出正常范圍或送入計(jì)算機(jī)不能識別的信號,且在一定時(shí)間內(nèi)無法消失,計(jì)算機(jī)就判斷傳感器相應(yīng)部位發(fā)生故障,將故障以代碼的形式存入存儲器中,同時(shí)發(fā)出聲光報(bào)警。
方向舵和倒航斗的位置是重要的監(jiān)測數(shù)據(jù),其反饋數(shù)據(jù)是4~20mA電流模擬量。方向舵和倒航斗的位置反饋傳感器位于泵艙內(nèi),通過從站內(nèi)的AD數(shù)據(jù)采集模塊進(jìn)行數(shù)據(jù)采集,CAN通訊模塊負(fù)責(zé)數(shù)據(jù)的傳輸,CPU模塊進(jìn)行數(shù)據(jù)的處理。系統(tǒng)配置見圖4。

圖4 方向舵和倒航斗系統(tǒng)配置
位置傳感器的輸出為4~20mA的電流值,數(shù)據(jù)從小到大,連續(xù)變化。在數(shù)據(jù)采集后,將6mA作為方向舵左滿舵的設(shè)定值,17mA作為方向舵右滿舵的設(shè)定值。6~17mA之間為正常范圍。當(dāng)數(shù)值在4~6mA和17~20.0mA之內(nèi)時(shí)發(fā)出系統(tǒng)報(bào)警。從站通過CAN通訊模塊將系統(tǒng)報(bào)警傳輸?shù)焦收献栽\斷檢測器。
2.4 同側(cè)泵防碰撞自診斷
雙體高速艇的同一側(cè)體安裝了 2臺噴水泵(內(nèi)側(cè)泵和外側(cè)泵),彼此的安裝位置比較接近,當(dāng)外側(cè)泵進(jìn)行打右舵,內(nèi)側(cè)泵進(jìn)行打左舵操作時(shí),2臺泵會互相靠近,超過一定范圍會發(fā)生碰撞。為此設(shè)計(jì)了防碰撞自診斷功能。
根據(jù)同體的內(nèi)側(cè)泵同外側(cè)泵發(fā)生碰撞的實(shí)際位置,測量出一個(gè)發(fā)生碰撞的危險(xiǎn)范圍,記錄發(fā)生碰撞的臨界值對應(yīng)的兩臺泵的舵角反饋值。從站以臨界值的大小為參考,實(shí)時(shí)監(jiān)測反饋值的大小,當(dāng)兩個(gè)舵角進(jìn)入該范圍內(nèi)時(shí),及時(shí)發(fā)出報(bào)警信號,并鎖定兩臺泵的方向舵,當(dāng)恢復(fù)到正常范圍的時(shí)候,才可以重新控制,實(shí)現(xiàn)了自診斷系統(tǒng)的提前預(yù)警功能,避免碰撞事故發(fā)生。
2.5 控制故障自診斷
正常的控制流程是:控制器件(手輪或手柄)發(fā)出控制指令,信號通過總線傳到對應(yīng)的從站,從站通過輸出電流來控制噴水泵的液壓系統(tǒng)的電磁閥來驅(qū)動(dòng)方向舵和倒航斗的移動(dòng)。整個(gè)控制流程采用閉環(huán)負(fù)反饋模式,使設(shè)定值和反饋值的差值在規(guī)定時(shí)間內(nèi),如果無法達(dá)到規(guī)定范圍,則發(fā)出控制故障報(bào)警,并對液壓電磁閥輸出降為零,鎖定出現(xiàn)控制故障的部位,防止出現(xiàn)誤操作[4]。其原理見圖5。
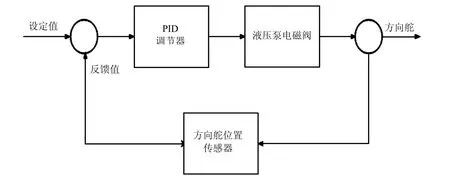
圖5 控制故障自診斷
在控制面板上設(shè)置“重新連接”按鈕,當(dāng)控制故障排除后,“重新連接”按鈕亮,這時(shí)按下按鈕,系統(tǒng)復(fù)位,重啟控制功能。
3 結(jié) 語
以雙體噴水推進(jìn)船為應(yīng)用案例,闡述了噴水推進(jìn)自動(dòng)化監(jiān)控系統(tǒng)故障自診斷的設(shè)計(jì)原理,通過不同類型故障的具體實(shí)施方法,最終設(shè)計(jì)并實(shí)現(xiàn)了一個(gè)可靠的故障自診斷系統(tǒng)。經(jīng)過實(shí)船的長期運(yùn)行,該系統(tǒng)可以及時(shí)檢查出軟件和硬件的故障,并反饋給操作人員,大大減少了維修,并縮短了維修時(shí)間,保障了船舶的安全運(yùn)行,具有極高的使用價(jià)值。
[1] 徐筱欣. 船舶動(dòng)力系統(tǒng)[M]. 上海:上海交通大學(xué)出版社,2007.
[2] 黃忠秀,等 船舶現(xiàn)代控制理論[M]. 北京:人民交通出版社,2001.
[3] 周德澤,等. 計(jì)算機(jī)智能檢測控制系統(tǒng)的設(shè)計(jì)及應(yīng)用[M]. 北京:清華大學(xué)出版社,2002.
[4] 王立祥. 噴水推進(jìn)及噴水推進(jìn)泵[J]. GM通用機(jī)械,2007, (10).
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
船舶(2021年4期)2021-09-07 17:32:22
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50
