變速集成發電機的變細分模糊PID調速控制
2012-10-31 06:53:46張玉峰李聲晉周奇勛
微特電機 2012年11期
張玉峰,李聲晉,盧 剛,周奇勛,周 勇
(1.西北工業大學,陜西西安 710072;2.西安科技大學,陜西西安 710054)
0 引 言
變速集成發電機組(以下簡稱VSIG)相對于傳統發電機,具有體積小、效率高、節能降噪、對柴油機速度范圍利用充分等優點,廣泛應用于移動電源、后備電源、風力發電、汽車電源等領域[1-3]。柴油機轉速的適應性系數低,受負荷影響大,需要配備油門調節機構調整供油量以保證系統的穩定運行。步進電動機由于結構簡單、輸入與輸出具有嚴格的對應關系,不受電壓波動和負載變化的影響,并且不累計控制誤差,非常適合用作油門調節執行機構[4]。
VSIG作為一個多變量、非線性、非穩態的系統,在運行階段調速范圍寬且負載性質、大小等都具有不確定性,采用常規的PID控制率很難滿足控制要求。將模糊控制與傳統PID控制相結合的模糊PID控制具有較強的非線性逼近能力,適合于VSIG這類非線性、時變及純滯后系統的控制,文獻[5-6]將模糊PID率應用于柴油機調速,通過仿真或實驗證明在誤差較大時能夠取得較好的調速性能,但小誤差時調速控制效果不好、穩態控制精度低。
本文以兩相混合式步進電動機作為油門調節執行機構,針對模糊自校正PID在穩態調速時的不足,利用細分控制技術改善執行機構的控制精度,將模糊自校正PID與執行電機細分控制技術相結合,提出一種新穎的變細分模糊PID調速控制策略。
1 調速控制器結構
VSIG調速控制器結構如圖1所示。控制器依據轉速誤差驅動執行步進電動機調節油門開度,以實現供油量的實時調節。此外,調速控制器實時檢測各環節,以實現對VSIG系統的綜合監控和控制功能。
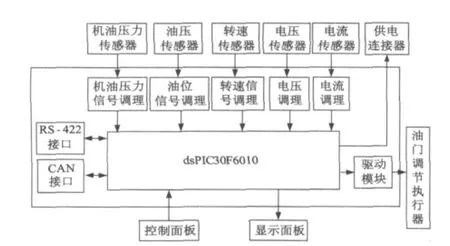
圖1 調速控制系統結構框圖
2 變細分模糊PID調速控制設計
2.1 VSIG調速控制率設計
目前柴油機的調速控制以PID控制率及其改進算法為主。其中模糊自校正PID不依賴于被控對象精確的數學模型,有較強的動態性能和魯棒性能,但模糊自校正邏輯控制器引入的控制參數貫穿整個過程,針對性差、參數選擇不易;在穩態擾動較大時,積分環節容易產生飽和現象,破壞系統穩定性。為此,本文提出一種變細分模糊自校正PID調速控制策略,其控制原理框圖如圖2所示。
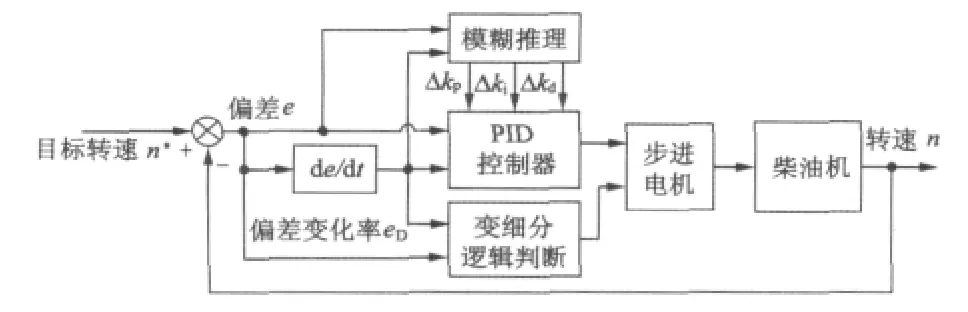
圖2 變細分PID參數模糊自校正控制器結構
變細分模糊自校正PID在各階段采用不同細分數增強控制參數的針對性:在動態調整過程中,采用較大細分數以保證良好的動態調速性能;進入穩態范圍后,采用較小的細分數以減小步進電動機抖動引起的穩態誤差,提高積分環節,消除穩態誤差的性能。
2.2 PID參數模糊自校正設計
數字增量式PID的數學形式如下:
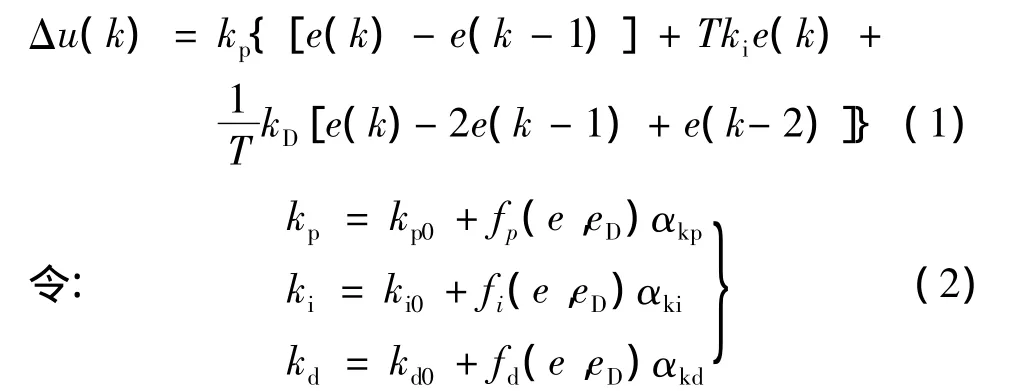
式中:kp、ki、kd為校正后的參數;kp0、ki0、kd0為初始化參數;fp(e,eD)、fi(e,eD)、fd(e,eD)為采用參數模糊校正器得到的增益校正值;αkp、αki、αkd為調整系數,如圖3所示。
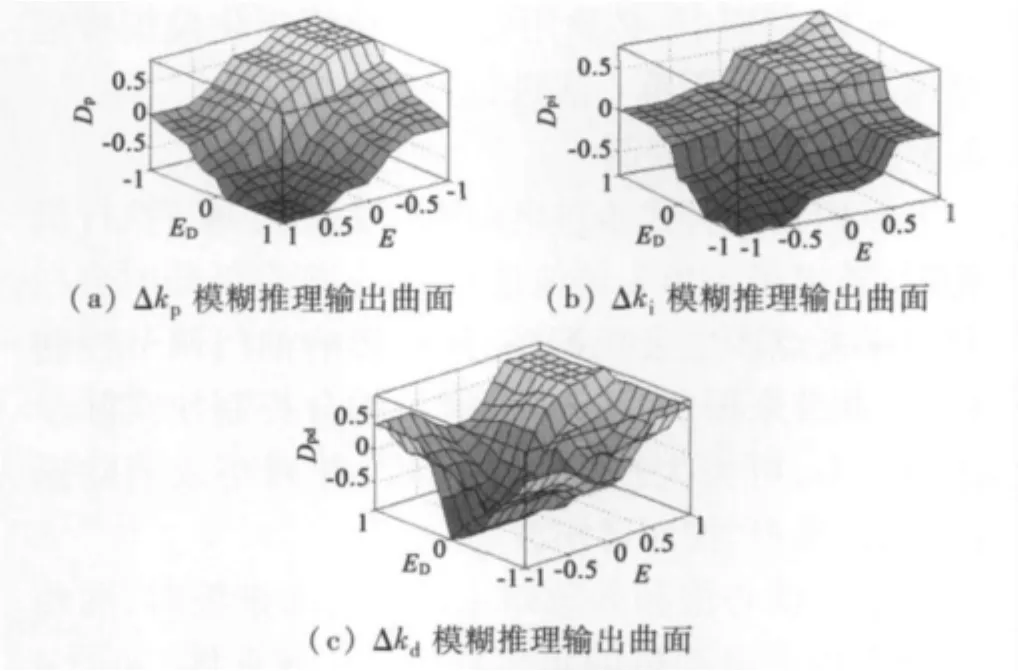
圖3 PID校正參數模糊推理輸出曲面
校正器包括一個常規PID調節器和模糊校正器。轉速偏差和偏差的變化率作為輸入,PID參數的校正值作為輸出,根據模糊控制規則做出推理,實現參數的校正。
2.2.1 校正系統輸入輸出變量模糊化
設某時刻的轉速誤差和轉速誤差變化率分別為e(k)和 eD(k),則有:

對系統轉速誤差e和誤差變化率eD,以及校正參數fp、fi、fd進行模糊化。對模糊校正調節器二維輸入e、eD和三維輸出fp、fi、fd劃分相同模糊子集如下:e、eD、fp、fi、fd={NB,NM,NS,ZO,PS,PM,PB}。映射到模糊集上的論域:e、eD、fp、fi、fd=[-1,1]。
將柴油機的速度誤差范圍劃定為[-50,50]r/min;轉速誤差變化率的范圍劃定為[-10,10](r/min)/s,超出范圍的作為邊界值處理;輸出參數fu(e,eD)的范圍劃定為[-100,100];則對應的量化因子分別為 0.02,0.1,0.01。
人民不再只是坐著,相信別人的胡言亂語。——諾貝爾和平獎得主格鮑伊公開表態支持“占領華爾街”運動,認為“自己的問題,只有自己解決”
2.2.2 建立參數自校正規則
根據kp、ki、kd對系統調速控制器輸出特性的影響[7-9],結合本系統對控制參數的具體要求,建立Δkp、Δki、Δkd參數的校正模糊規則集,如表1所示。
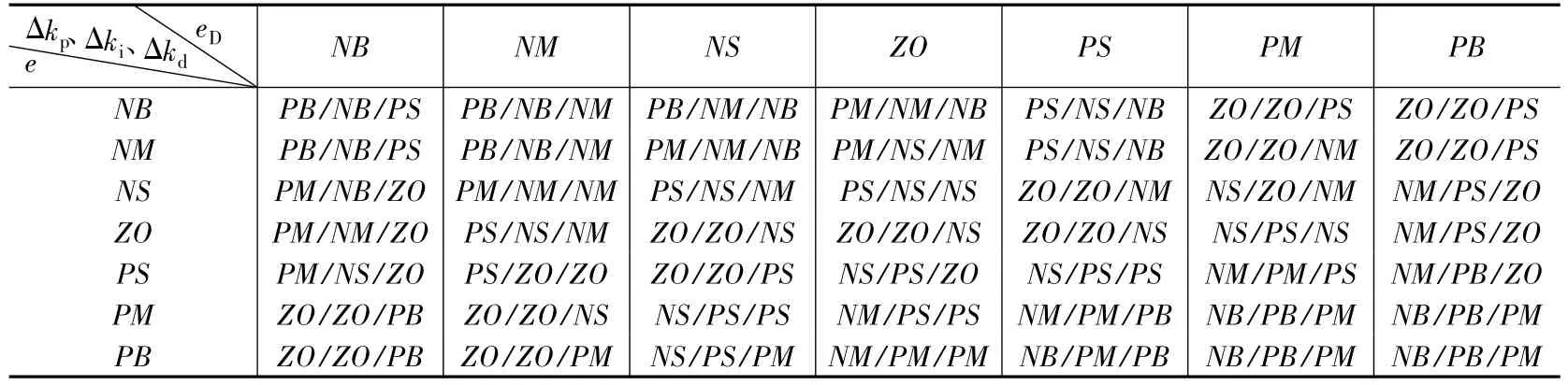
表1 Δkp、Δki、Δkd參數調整模糊規則集模型
2.2.3 模糊推理規則建立及校正參數的解模糊
依據表1建立的校正參數推理規則,按照Min-Max推理方法,得到校正參數的輸出曲面,如圖3所示。
實際應用中,必須用確定的值清晰化模糊推理結果。本文采用重心法進行去模糊。
2.3 變細分驅動控制
以兩相混合式步進電動機作為油門調節執行機構時,若以步距角為單位進行控制,則在低頻時會在穩定平衡點產生衰減振蕩,從而影響油門調節控制精度,并帶來振動及噪聲。通過細分控制使實際步距角減小,可大大提高控制精度,并減小或消除振蕩,降低噪聲,抑制轉矩波動。
不計鐵心飽和并忽略主磁導高次諧波時,兩相混合式步進電動機的矩角特性為正弦曲線,如圖4所示。通以A、B兩相電流時,轉矩可表示:

式中:k為比例系數;θe為轉子的電角度位置。
若兩相繞組分別通以如下電流:
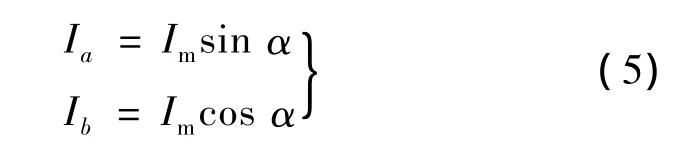
式中:α為期望的轉子定位電角度,將式(5)代入式(4),得:

由式(6)可以看出,兩相混合式步進電動機的細分是通過控制兩相繞組中電流的大小,使步進電動機按照同步運行方式旋轉。電機內部的合成磁場為圓形空間旋轉磁場,合成磁場的矢量大小決定了電機的轉矩大小,相鄰兩個合成磁場矢量的夾角為細分之后的步距角。

圖4 兩相混合式步進電動機的矩角特性
VSIG在調速的動態階段和穩態階段,對油門調節電機的控制要求和控制精度不盡相同,因此可采用變細分控制:在動態調整階段對步進電動機采用較粗的細分步數,可減小振蕩并保證動態響應性;在進入穩態運行階段后,加大細分數,可抑制穩態運行階段由于轉矩脈動引起的擾動,提高穩態調速精度。
3 試驗及分析
為驗證系統功能和性能,本文進行了樣機實驗。樣機為單缸、四沖程、風冷、直噴式VSIG系統,標定轉速nN=3000 r/min,標定功率PN=3 kW。運行速度范圍為2250~3000 r/min。油門調節電機采用42BYGH型兩相混合步進電動機。為調試方便,編制了上位機,采用 RS422通訊接口,波特率57600 b/s。
系統調速性能試驗通過對系統施加阻感負載進行測試,速度曲線如圖5所示。圖5(a)、圖5(c)為固定4細分下采用模糊參數自校正PID的調速曲線;圖5(b)、圖5(d)為變細分模糊PID控制的調速曲線,動態調整階段采用4細分,進入設定誤差帶后采用32細分。圖5(a)、圖5(b)為施加150%阻感負載時的速度曲線;圖5(c)、圖5(d)為額定轉速下施加10%阻感負載時的速度曲線。

圖5 不同調速策略下施加擾動的調速曲線
從圖中可以看出,固定細分下采用模糊參數自校正PID進行調速控制時,速度響應快,但調整過程過沖較大,在小擾動及穩態運行時,速度波動較大。采用變細分模糊PID進行調速時,既保證了調速的動態性能,又改善了小擾動及穩態調速性能。
4 結 語
針對VSIG寬運行范圍內的調速監控,研制了一套綜合調速監控系統,結構簡單,功能完備。針對模糊PID在穩態調速效果不足的問題,將調速控制策略與執行電機驅動策略相結合,提出變細分模糊PID調速控制,以實現VSIG在整個運行范圍內良好的動靜態調速性能。樣機實驗驗證了所設計的調速控制系統及調速控制策略的有效性,能夠顯著改善模糊控制器在穩態時的控制精度。
[1]Al- Khayat N,Al- Tayie J,Seliga R.Stand alone adjustable speed power generating set[C]//10th Internet Conference on Harmonics and Quality of Power.2002:639 - 642.
[2]Grzesiak L M,Sobolewski J.Electrical Energy Source with variable speed diesel engine,controlled by using the neural voltage regulator[C]//2005 European Conference on Power Electronics and Applications.2005:1 -8.
[3]Leuchter J,Rˇerˇucha V,Krupka Z,et al.Dynamic behavior of mobile generator set with variable speed and diesel Engine[C]//PESC 07-IEEE 38th Annual Power Electronics Specialists Conference.2007:2287 -2293.
[4]沈銳,盧剛,李聲晉,等.基于步進電動機SPWM驅動的發電機調速控制[J].微特電機,2011(12):43-49.
[5]夏耀洲,朱從喬.基于修正因子模糊數模型的柴油機調速技術研究[J].內燃機工程,2004,25(1):51-53.
[6]McGowan D J,Morrow D J,Fox B.Multiple input governor control for a diesel generating set[J].IEEE Transactions on Energy Conversion,2008,23(3):851 -859.
[7]李鑫,盧剛,李聲晉,等.基于模糊PID算法的輪式機器人驅動輪控制器設計[J].微特電機,2011(11):57-64.
[8]宋百玲,費景洲,宋恩哲.船用柴油機模糊-PID復合調速及快速控制原型研究[J].內燃機工程,2010,31(4):54 -58.
[9]周勇.用于四輪純電動車輛的電控驅動系統設計研究[D].西安:西北工業大學,2011:49-52.