基于人工神經網絡的駕駛員操縱行為模型
2012-11-03 03:09:21顏世偉高正紅
飛行力學 2012年2期
顏世偉, 高正紅
(西北工業大學 航空學院 , 陜西 西安 710072)
基于人工神經網絡的駕駛員操縱行為模型
顏世偉, 高正紅
(西北工業大學 航空學院 , 陜西 西安 710072)
駕駛員操縱行為受到自身、外界環境和被控對象等多方面的影響,因此駕駛員模型具有非線性的特征。神經網絡模型克服了擬線性模型不能反映駕駛員非線性操縱的問題。為了獲得建立模型的數據,利用地面模擬器使飛行員對一系列指令進行精確跟蹤。獲得的指令、飛機狀態和駕駛員輸入信息等參數即可作為神經網絡模型的訓練樣本。神經網絡駕駛員模型的訓練和測試結果表明,該建模方法是合理、準確的,可以應用于人機閉環系統中駕駛員操縱的研究。
人機系統; 駕駛員模型; 人工神經網絡; 地面模擬器
引言
駕駛員模型研究在人機系統飛行品質和駕駛員誘發振蕩(Pilot Induced Oscillation, PIO)等方面都有廣泛的應用。在由駕駛員、飛機組成的人機系統中,“飛機”還包括飛機運行中的各類顯示裝置和操縱裝置。駕駛員通過本身的感受和顯示裝置的指示了解飛機的運行情況,并根據任務的需要,通過操縱系統對飛機運行進行控制。盡管人的各種特質,如情緒、想象力等影響操縱行為的特征無法用數學模型來加以描述,但在某些具體的飛行任務中駕駛員的操縱行為是可以模型化的。因為在這些任務中駕駛員的操縱行為受到飛機和任務等條件的限制,操縱行為會體現出某種規律性,而這種規律性就為駕駛員控制的數學模型化提供了基礎[1]。
在擬線性駕駛員模型研究中,McRuer等人在對大量單自由度補償任務研究的基礎上建立了McRuer駕駛員控制模型。Baron,Kleinmen等人利用現代控制理論建立了最優控制模型。為了能建立更準確的反應駕駛員的控制特性和方便在飛行品質評估中使用的駕駛員模型,以及隨著神經網絡理論的發展,人們提出了神經網絡駕駛員模型。下面將對神經網絡駕駛員模型進行探討,并進一步發展和驗證這種模型。
1 駕駛員操縱行為模式與駕駛員模型
1.1 駕駛員操縱行為模式
大量的實踐表明,駕駛員通常采用兩種方式操縱飛機,這兩種方式模型化后可表示為:開環操縱和閉環操縱。對于不需要精確控制飛機飛行速度、姿態和航跡的飛行狀態,例如爬升、下降、巡航等,駕駛員一般通過操縱飛機的油門桿和駕駛桿來改變飛機的運動,而運動參數的變化并不能及時地影響駕駛員的操縱。在這種情況下,由駕駛員、操縱系統和飛機這幾個環節組成的這一串聯系統,不形成封閉回路,稱為開環系統。
與之對應的,對于需要精確控制飛機飛行速度、姿態和航跡的飛行狀態,例如編隊、空戰等,駕駛員要隨時注意飛機運動參數的變化,反復地調整油門位置和駕駛桿,以及時修正飛機的姿態,達到精確操縱的目的。在這種操縱方式中,通過飛機運動參數的反饋使駕駛員、操縱(控制)系統和飛機這三個環節形成了閉環回路,稱為閉環系統。這時,駕駛員所施加的操縱是按照飛機運動參數的變化而及時調整的,從而能達到更為精確地控制飛機的目的。
駕駛員控制飛機的行為只是人控制機器行為的一個特例。所以,可以從大量的人機系統動力學研究中得到一些啟示。根據人機系統研究的結果,閉環的人機控制可按照輸入給操作人員信息的性質來進行分類,通常可以分為四類:補償系統、追蹤系統、預先顯示系統、預先認知系統[2]。
1.2 傳統的駕駛員模型
McRuer模型是20世紀60年代中期由McRuer,Graham等人在大量簡單跟蹤任務試驗結果的基礎上提出的一種擬線性駕駛員控制模型。McRuer模型為:

式中,Kp為增益;s為拉普拉斯算子;τ為駕駛員反應的時間延遲;TN為神經肌肉系統固有的一階延遲;TL,TI分別為超前和滯后時間常數。McRuer駕駛員模型中的各個系數的大小反映了駕駛員操縱行為的具體特征。例如當駕駛的滯后補償TI增大后,人機系統閉環短周期阻尼比有所增加,但隨著增益的加大,會導致人機閉環系統失穩。這也是駕駛員一般不愿意在飛行中采用滯后補償操縱方式的原因。
雖然在完成特定任務時,駕駛員的操縱都遵循一定的規律,但是由于人的生理條件和外部環境的限制和影響使得駕駛員完成任務的操縱指令都不完全相同。例如每次任務中辨識出的McRuer駕駛員模型都是不相同的,或者同一個駕駛員模型無法適應于不同的任務。這就為具體選擇和使用McRuer模型造成了一定的困難。
神經網絡建模方法可以對非線性動態系統進行有效的建模并揭示數據間的相互關系,這種建模方法克服了McRuer模型參數與實際任務關聯緊密的不足。對于駕駛員模型來說,以往利用傳遞函數形式的駕駛員模型往往難以實現對駕駛員行為的較精確地逼近,原因是駕駛員本身操縱行為的非線性。而神經網絡卻能夠模擬具有較高非線性的連續動力學系統,而且在函數逼近方面具有很強的非線性逼近能力,且神經網絡方法在建模的諸多領域得到廣泛的應用。許多實際應用的研究表明,神經網絡方法適合非線性系統的模型識別。
2 試驗環境與設計
2.1 地面模擬裝置
為了獲得駕駛員操縱行為建模的試驗數據,采用了地面模擬飛行任務的方式采集所需的數據。地面模擬試驗采用了自主研發的地面模擬器,模擬器配置如圖1所示。指令信號顯示在平顯(HUD)上,其中縱向指令信號為一個醒目的紅色虛線,例如顯示在圖2中-20°的位置,它為駕駛員提供縱向的指令信息,平顯上W形的符號指示了飛機的實際俯仰角。駕駛員通過操縱飛機,使平顯上的俯仰角信號與指令信號的標示重合即可完成對指令的跟蹤。指令的設計可以通過配置模擬器中相應的文件來實現,指令的大小與變化將根據具體的試驗來制定。指令信號可以由階躍指令、脈沖指令、隨機指令等信號組成。
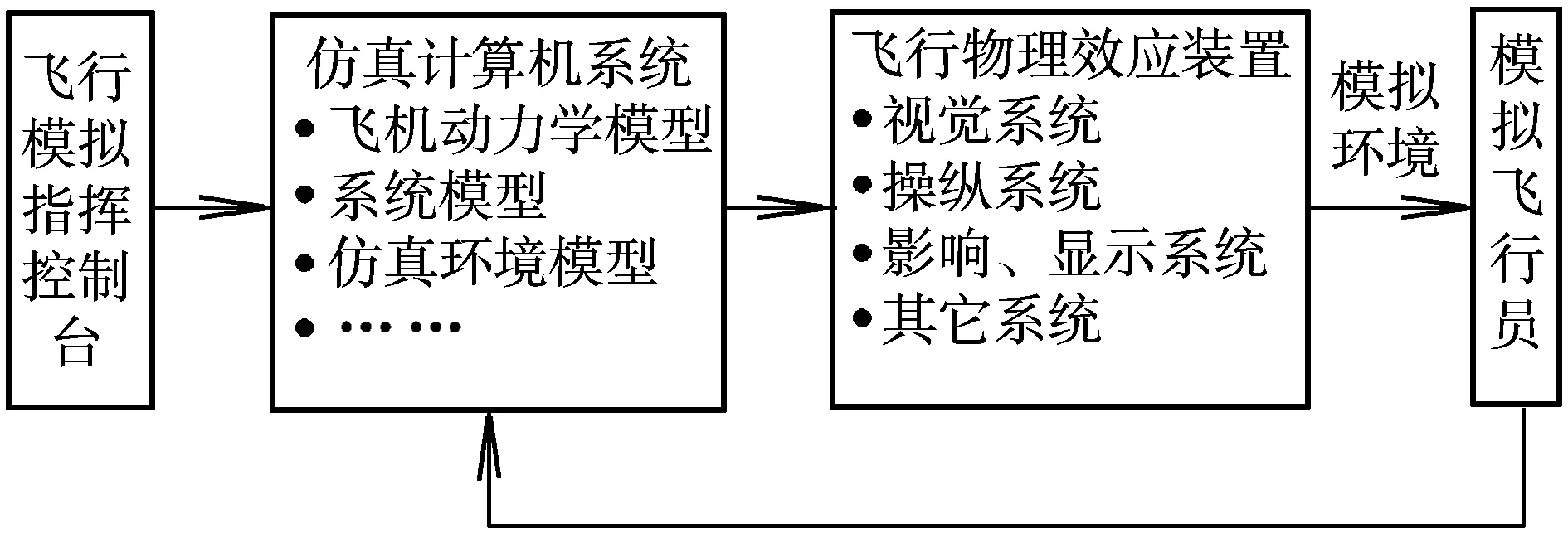
圖1 模擬器配置
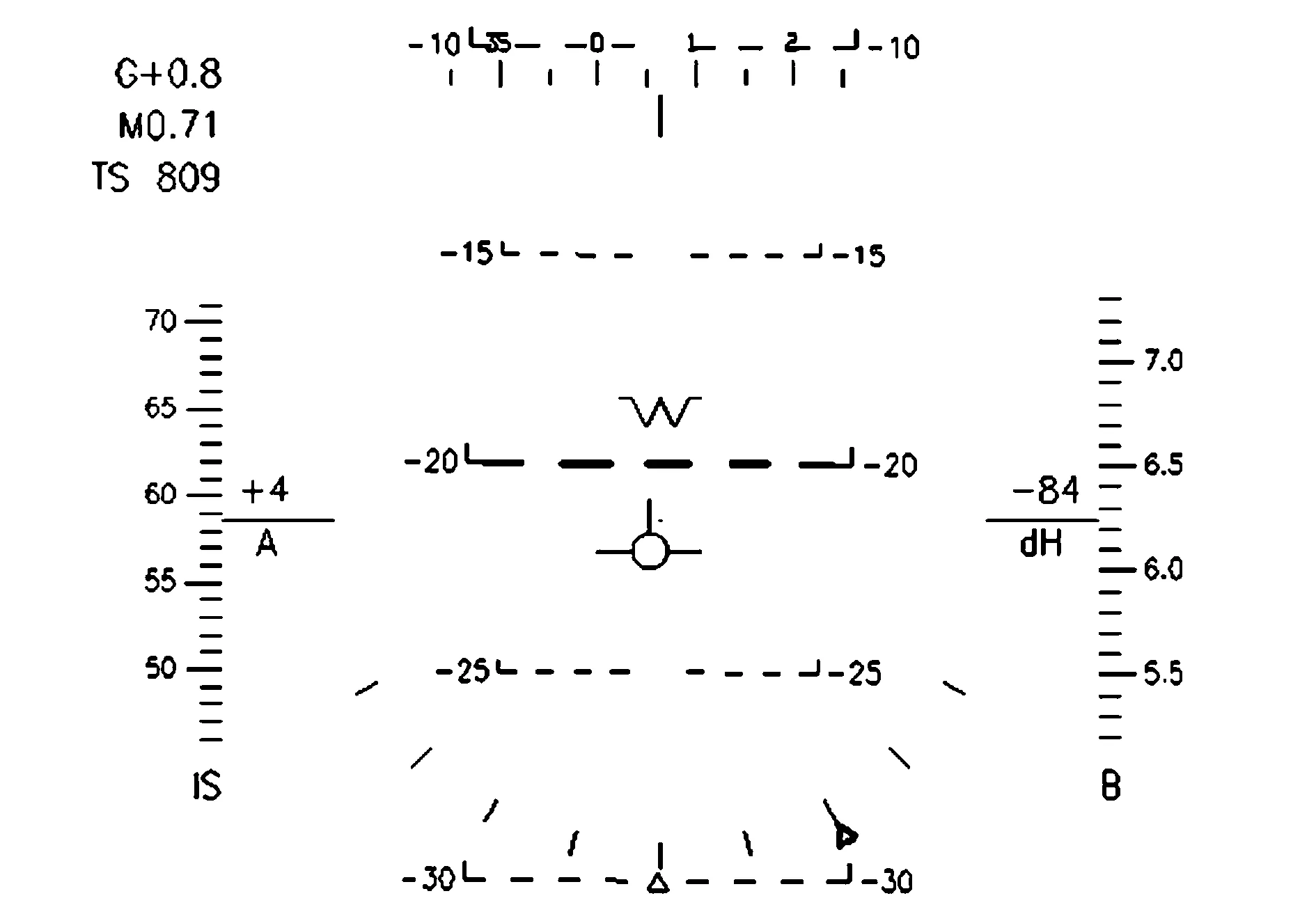
圖2 平顯中縱向指令的顯示
模擬器中使用的飛機模型的縱向傳遞函數可以近似表示為:
2.2 人機閉環試驗設計
為了獲得辨識和驗證駕駛員模型的數據,在模擬器上進行的是單自由度補償任務。試驗借鑒了評估飛行品質的階躍指令動作,采用了縱向的連續階躍指令。使用階躍指令可以用來檢驗飛機初始狀態時的響應、阻尼比和頻率,時域響應的結果也可以用于人機系統的辨識。當試驗開始時,每個俯仰角指令由0°開始,然后依次出現正負變化的階躍俯仰角指令。飛行員通過平顯觀察飛機實際的俯仰角和指令信號的位置來操縱飛機,盡量使俯仰角與指令相同,并保持穩定的狀態。指令信號θcmd由零和正負階躍指令組成(見圖3),其中實線為指令,虛線為飛機的俯仰角。圖4中實線為指令信號與飛機的實際俯仰角之間的差值e,虛線為駕駛員的輸出量產生的縱向桿位移x。
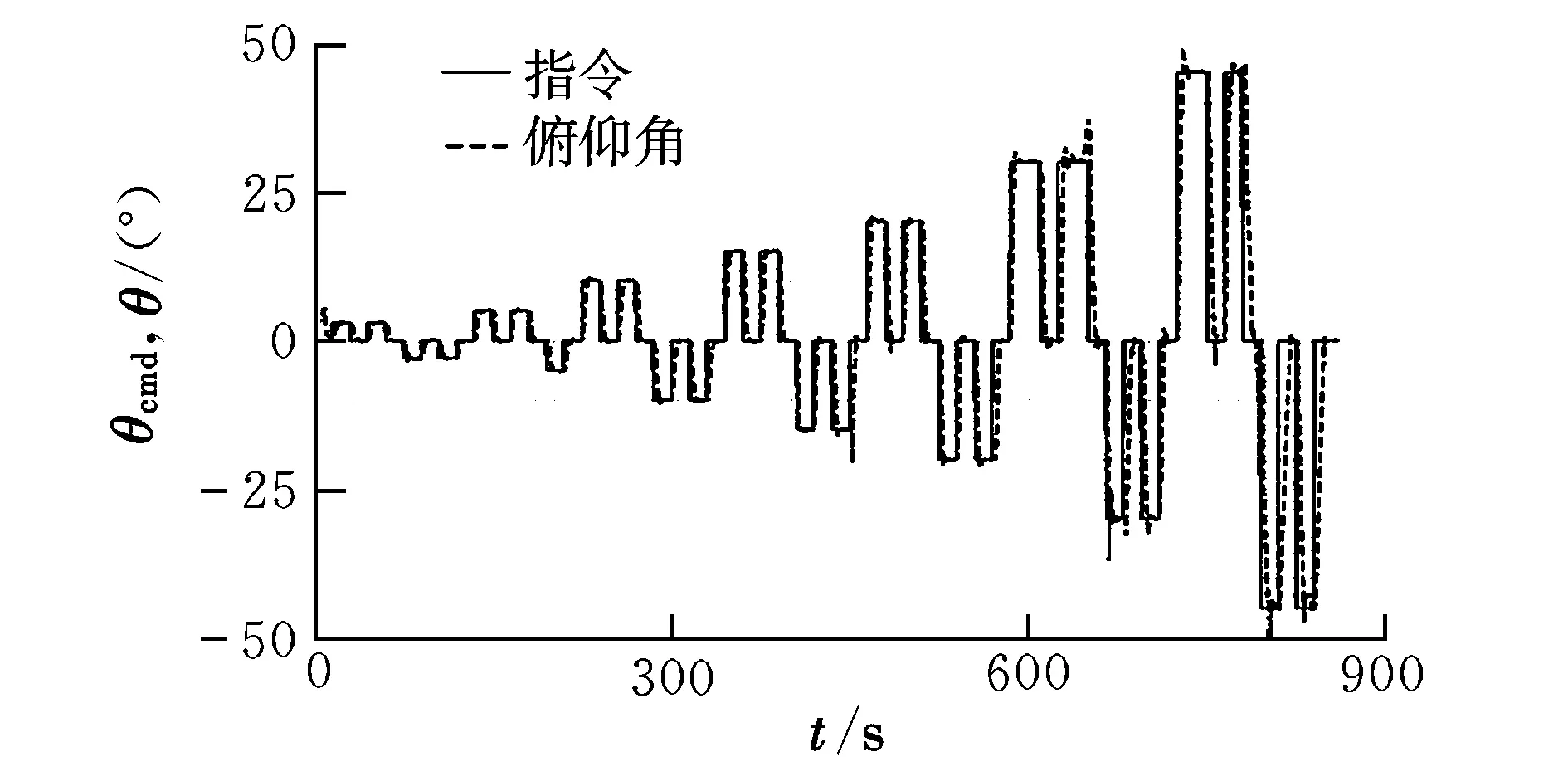
圖3 縱向指令信號與俯仰角
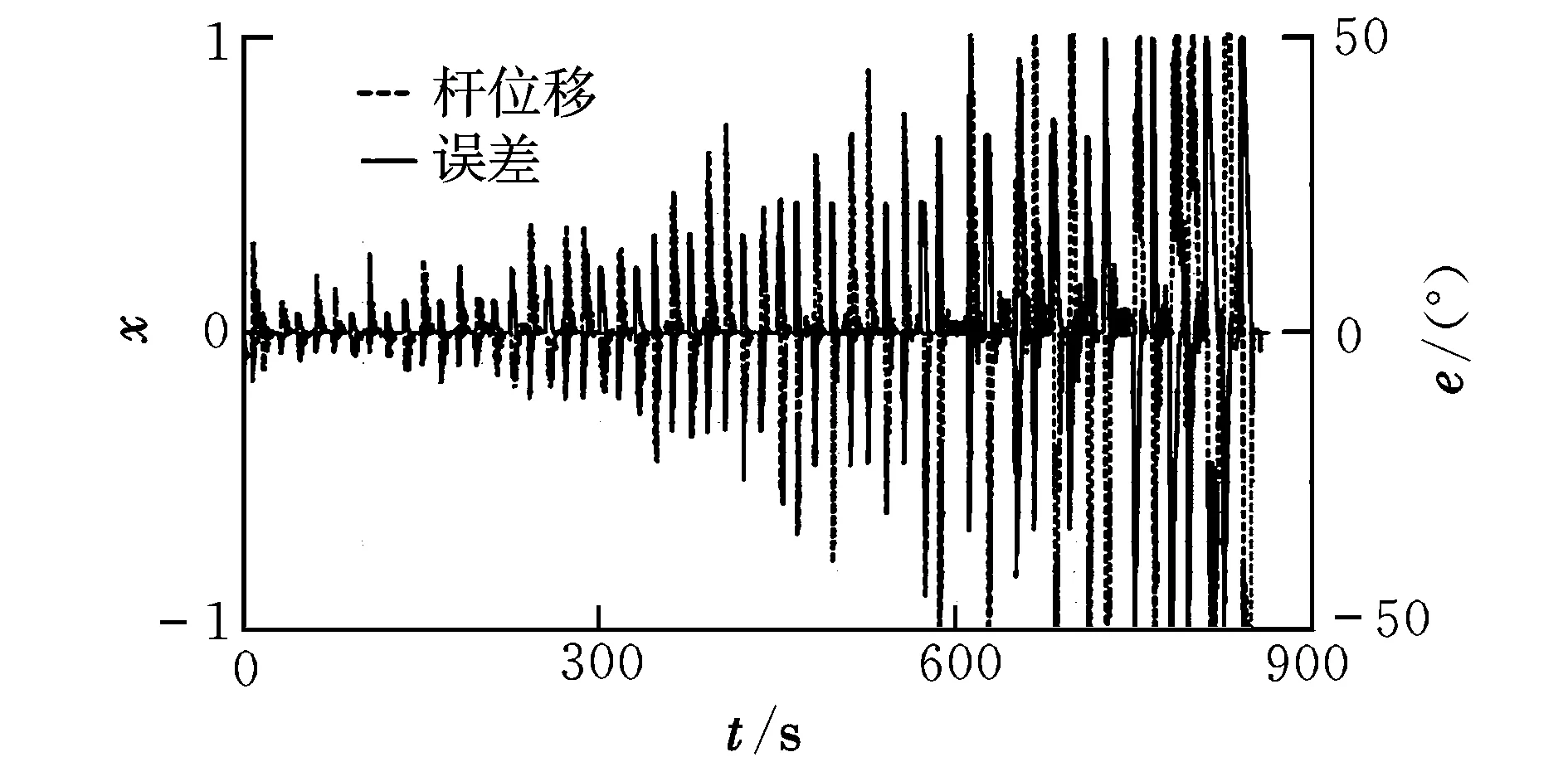
圖4 桿位移與誤差信號
3 駕駛員模型的建立
3.1 人工神經網絡模型
神經網絡是由神經元按照一定的方式連接起來的,能夠模擬人腦神經系統的運行機制,使神經網絡具有自主學習的能力。其中神經元為神經網絡的基本處理單元。通過對神經網絡的在線或離線訓練,可使預先建立起來的神經網絡對收集的信息進行學習,使神經網絡揭示出數據中包含的規律并可以根據輸入的信息進行相應的控制[3-4]。
神經網絡駕駛員模型正是利用了神經網絡的這些特點來對駕駛員的操縱行為進行建模。雖然駕駛員在完成特定的單軸控制任務時可以簡化成單通道的控制模型,但是這種單通道模型無法體現駕駛員的操縱特點,對單通道補償跟蹤任務的數據進行駕駛員模型辨識的結果可以看出,相同任務和相同駕駛員的操縱都是不相同的。在實際情況下,駕駛員不僅參照平顯上的誤差提示信息來操縱飛機,飛行儀表、平顯上的其他參數對駕駛員的操縱都會造成影響。
3.2 BP神經網絡駕駛員模型
駕駛員控制模型采用三層BP神經網絡結構,BP神經網絡具有對非線性模式進行識別的能力,它的這個特點符合駕駛員操縱行為的非線性特征。文獻[5]中對神經網絡模型與擬線性模型各自的優勢進行了比較,并驗證了神經網絡在擬合駕駛員對隨機信號跟蹤時的操縱行為模型的有效性,這種單輸入單輸出的模型能夠很好地跟蹤操縱的變化趨勢。
對于BP神經網絡模型來說既可以采用單輸入單輸出的形式,也可以使用多輸入多輸出的形式[6]。為了使建立的模型能夠更準確地體現出駕駛員操縱的非線性和多路信號對操縱的影響,多輸入單輸出的神經網絡模型使用了4個參數作為模型的輸入。這4個輸入分別是:俯仰角指令、飛機的實際俯仰角、前面這兩個量的差值(誤差)和桿位移。神經網絡模型的輸出為駕駛員的操縱量(縱向桿位移)。根據上述簡化,駕駛員縱向操縱模型的輸入輸出形式如圖5所示。模型的輸入量駕駛員桿位移與模型輸出的桿位移是不相同的。為了能在輸入量中體現出信號的變化情況,輸入信號為當前時刻之前產生的值。以采樣率為0.1 s為例,模型輸出為0時刻的值,輸入量即為-0.5~-0.1 s的值。這4個模型輸入既包括了駕駛員接收到的指令,也包括飛機的響應與響應變化快慢的信息。
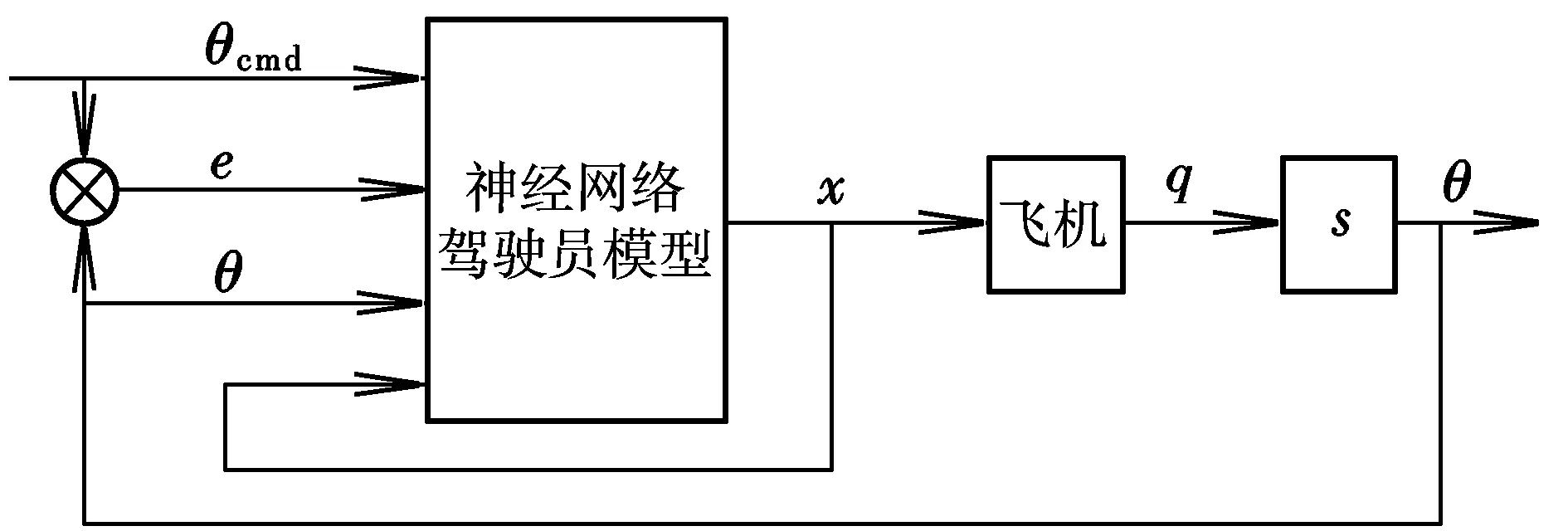
圖5 神經網絡駕駛員模型
4 仿真試驗與建模結果分析
仿真試驗采用的指令為圖4中實線。為了盡可能多地采集駕駛員的信息和減少駕駛員操縱失誤對試驗數據的影響,最后選取誤差比較小和操縱比較精確的試驗數據作為進行建模和驗證模型的數據。訓練神經網絡的數據為±20°指令之外的試驗數據,以這些指令時的數據作為神經網絡的訓練樣本。網絡的學習方法有很多種,經過驗算通過不同學習方法得到的網絡性能基本一致。
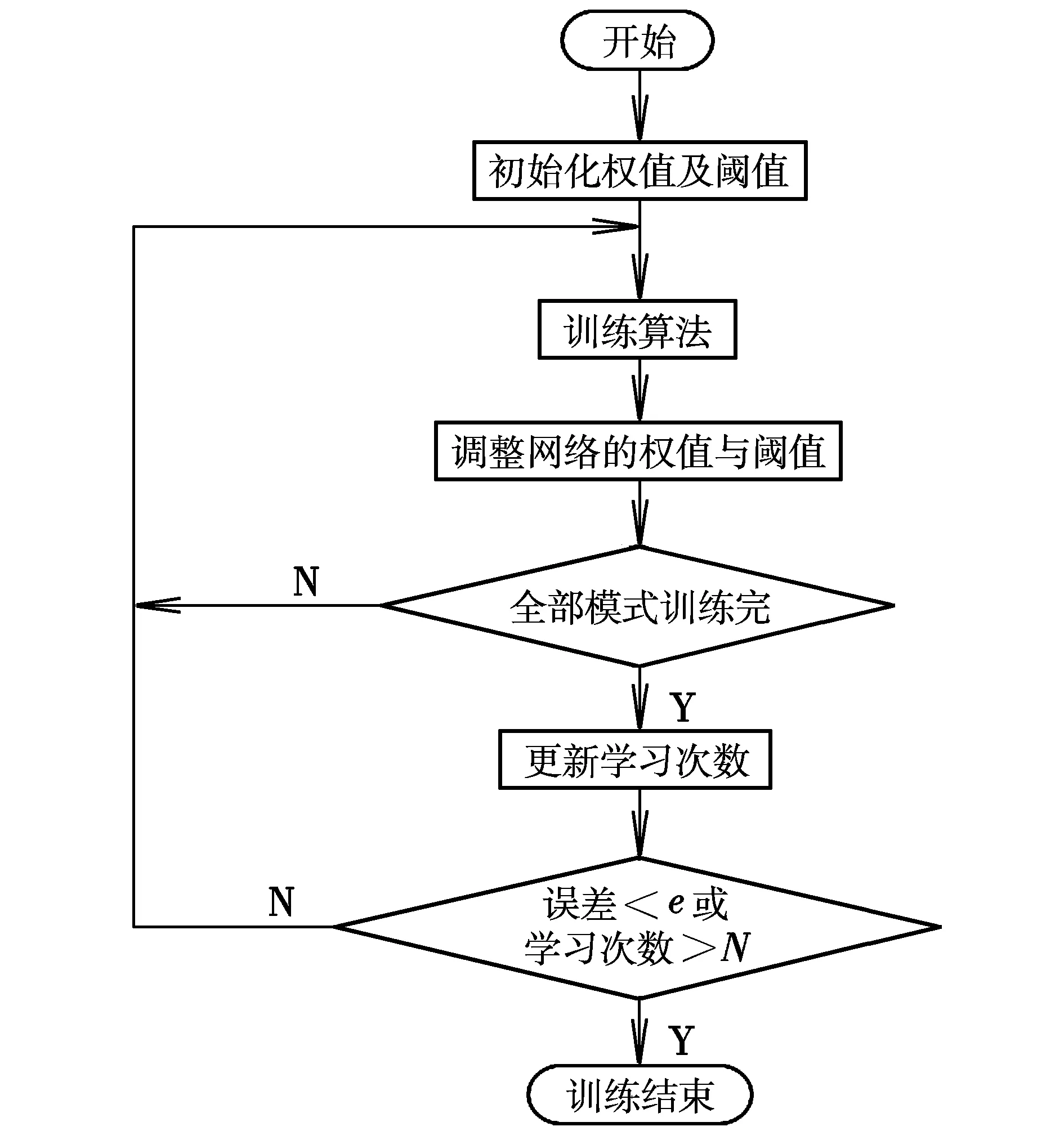
圖6 神經網絡學習過程
神經網絡的學習過程如圖6所示。神經網絡模型為三層結構:一個輸入層、一個隱層和一個輸出層。隱層神經元的個數一般根據經驗公式選擇。如果選擇的神經元個數太少,將無法實現對數據規律的學習;神經元越多,網絡對數據逼近的能力越強,但過多的隱層神經元會使網絡逼近的是信號中的擾動,而不是駕駛員的真實操縱。文中模型的隱層神經元個數是通過嘗試經驗公式范圍網絡誤差輸出最小來確定的。這里網絡輸入層的個數為20,隱層神經元個數為30。隱層神經元選擇了雙曲正切傳遞函數,輸出層選擇線性傳遞函數。
圖7和圖8為訓練與仿真結果。圖7中的曲線為訓練數據的部分結果,實線為駕駛員控制的實際桿位移,虛線為模型輸出。圖8為駕駛員實際輸出和模型對測試數據的輸出,實線為駕駛員的輸出,虛線為模型的輸出。測試神經網絡模型的數據選擇了俯仰指令為±20°時飛機和駕駛員的響應。這組數據未包含在神經網絡訓練數據中,所以對于神經網絡模型來說這組數據是一組全新的數據。從圖8中網絡的輸出可以看到,模型根據輸入量基本可以擬合出駕駛員的輸出信號。
圖9為仿真結果與實際值的誤差,可以看出在俯仰角保持階段,模型的誤差很低,在指令開始變化后模型的誤差才會增大,但誤差量也比較小。
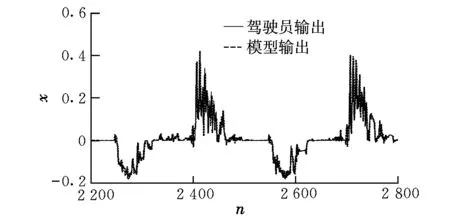
圖7 神經網絡訓練結果
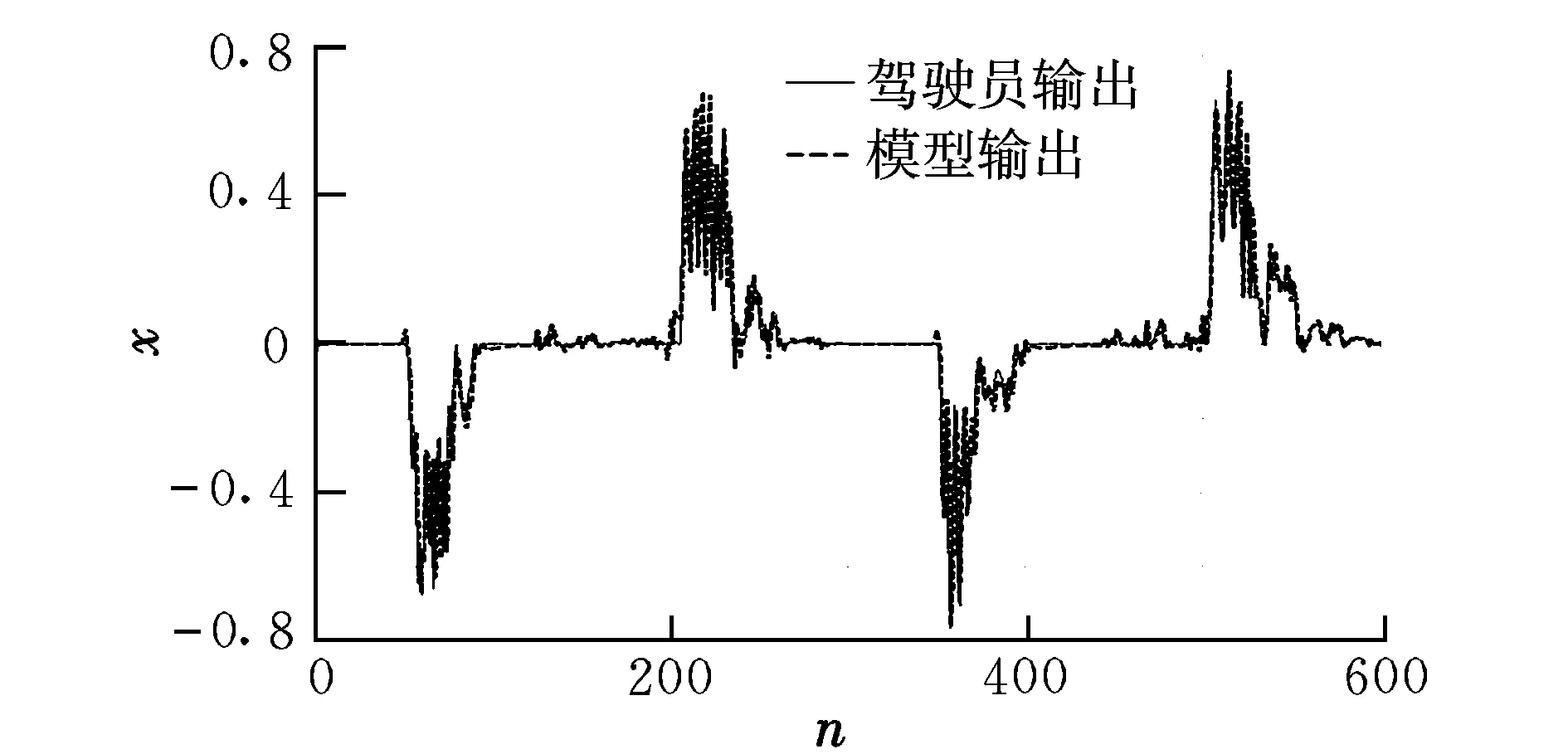
圖8 神經網絡仿真結果
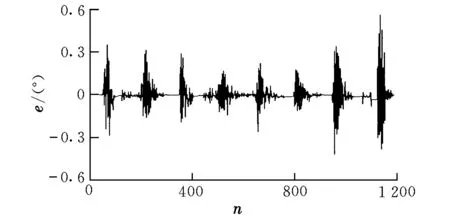
圖9 仿真誤差
5 結束語
對針駕駛員操縱的多通道、非線性的特點,利用BP神經網絡對駕駛員的操縱行為進行了建模。通過對神經網絡模型的訓練以及測試結果與駕駛員實際操縱量的對比可以看出,神經網絡駕駛員模型可以較好地跟蹤指令的變化,再現駕駛員的操縱行為,同時對未知指令也有一定的預測和跟蹤能力。
[1] 胡兆豐.人機系統和飛行品質[M].北京:北京航空航天大學出版社,1994.
[2] 高浩,朱培申,高正紅.高等飛行動力學[M].北京:國防工業出版社,2004.
[3] 楊淑瑩.模式識別與智能計算:Matlab技術實現[M].北京:電子工業出版社,2008.
[4] 飛思科技產品研發中心.神經網絡理論與MATLAB7實現[M].北京:電子工業出版社,2005.
[5] 譚文倩,屈香菊,王維軍.駕駛員神經網絡模型與頻域擬線性模型的比較研究[J].航空學報,2003,24(6):481-485.
[6] 徐瑾,趙又群,阮米慶,基于汽車操縱動力學的神經網絡駕駛員模型[J].動力學與控制學報,2008,6(4):381-384.
Researchonpilotbehaviormodelbasedonartificialneuralnetwork
YAN Shi-wei, GAO Zheng-hong
(College of Aeronautics, Northwestern Polytechnical University, Xi’an 710072, China)
Pilot control behavior will be affected by the motion of object, pilot-himself and environments, all these disturbances make the control behavior present non-linear characteristics. Therefore the pilot model should have these features which the quasi-linear model could not represent, but the artificial neural network (ANN) pilot model has this pilot control behavior features. The test on ground-based simulator made the flight and pilot’s data to use for making the ANN pilot model. Compared with McRuer pilot model, the precision and applicability of neural network pilot model could be better.
aircraft-pilot system; pilot behavior model; artificial neural network; ground-based flight simulator
2011-06-13;
2011-10-31
顏世偉(1982-),男,黑龍江哈爾濱人,博士研究生,研究方向為飛行力學。
V212.1
A
1002-0853(2012)02-0105-05
(編輯:王育林)
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
汽車實用技術(2022年14期)2022-07-30 06:13:42
環球時報(2022-05-30)2022-05-30 15:16:57
汽車實用技術(2022年4期)2022-03-07 06:07:20
當代陜西(2019年11期)2019-06-24 03:40:28
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
公民與法治(2016年4期)2016-05-17 04:09:26