主動防御協(xié)同自適應(yīng)滑模制導(dǎo)律
2012-11-03 01:24:02花文華陳興林宋超
飛行力學(xué) 2012年1期
花文華, 陳興林, 宋超
(1.洛陽光電技術(shù)發(fā)展中心 控制系統(tǒng)研究所,河南 洛陽 471009;2.哈爾濱工業(yè)大學(xué) 航天學(xué)院, 黑龍江 哈爾濱 150001;3.天津航海儀器研究所 第十研究室, 天津 300131)
主動防御協(xié)同自適應(yīng)滑模制導(dǎo)律
花文華1,2, 陳興林2, 宋超3
(1.洛陽光電技術(shù)發(fā)展中心 控制系統(tǒng)研究所,河南 洛陽 471009;2.哈爾濱工業(yè)大學(xué) 航天學(xué)院, 黑龍江 哈爾濱 150001;3.天津航海儀器研究所 第十研究室, 天津 300131)
飛機相比于攻擊導(dǎo)彈,在飛行速度和機動性能等方面存在著劣勢。為了提高其生存幾率,設(shè)計了一種發(fā)射防御導(dǎo)彈協(xié)同對抗攻擊導(dǎo)彈的自適應(yīng)滑模制導(dǎo)律。該制導(dǎo)律本質(zhì)是一種視線(Line of Sight, LOS)制導(dǎo)方法,通過對飛機與防御導(dǎo)彈和防御導(dǎo)彈與攻擊導(dǎo)彈間的LOS調(diào)整以滿足特定的幾何關(guān)系,從而實現(xiàn)對攻擊導(dǎo)彈的主動防御。最后,將所設(shè)計的制導(dǎo)律與比例導(dǎo)引進行了仿真比較。結(jié)果表明,由于與目標間的協(xié)同,所設(shè)計的制導(dǎo)律在機動性能和攔截性能方面具有明顯的優(yōu)勢,且對于三方的飛行速度變化與攻擊導(dǎo)彈的機動具有較強的魯棒性。
制導(dǎo)律; 自適應(yīng)滑模控制; 協(xié)同; 視線制導(dǎo)
引言
相比于攻擊導(dǎo)彈,飛機在飛行速度和機動性能等方面存在較大的劣勢,為規(guī)避威脅往往采用一些較為被動的防御措施,如投放箔條彈等,但即使具有足夠的飛行速度和機動性能,也可能因為負載約束或任務(wù)目標,如要求按照規(guī)劃航路到達指定區(qū)域、載有大型偵察天線或者運送傷員等而無法規(guī)避機動,因此發(fā)射防御導(dǎo)彈進行主動防御是一種可選的方式。
對于主動防御的三方——飛機(Target)、防御導(dǎo)彈(Defender)和攻擊導(dǎo)彈(Missile)制導(dǎo)情形,文獻[1]首先分析了最優(yōu)制導(dǎo)策略的可行性,文獻[2]假設(shè)防御方非機動,攻擊導(dǎo)彈與防御導(dǎo)彈具有理想自動駕駛儀動態(tài)且無機動界約束,推導(dǎo)了三方的閉環(huán)運動學(xué)關(guān)系。文獻[3]將該情形定義為連續(xù)微分對策問題,采用沖激函數(shù)以獲得相應(yīng)Riccati微分方程的離散解,而文獻[4]則直接將情形定義為離散對策問題。文獻[5]在非完全信息(Imperfect Information)[6-7]情形下,假設(shè)攻擊導(dǎo)彈制導(dǎo)策略為比例導(dǎo)引、擴展比例導(dǎo)引或最優(yōu)制導(dǎo)律中的一種,研究了一種基于多模型自適應(yīng)估計與控制的自適應(yīng)制導(dǎo)方法。上述方法都完全或部分基于線性化假設(shè),具有一定的局限性。文獻[8]給出了一種視線(Line of Sight, LOS)制導(dǎo)[9-10]方法,并在防御方機動的情形下,分析了三方的運動學(xué)關(guān)系,但該方法是一種幾何方法,對于系統(tǒng)內(nèi)部的不確定性不具有魯棒性。本文針對飛機與防御導(dǎo)彈協(xié)同對抗攻擊導(dǎo)彈這一問題,給出一種協(xié)同自適應(yīng)滑模制導(dǎo)律,這一方法本質(zhì)是一種LOS制導(dǎo)方法,但是由于采用自適應(yīng)滑模的設(shè)計思路,對于系統(tǒng)內(nèi)部的不確定性和外部干擾具有較強的魯棒性。
1 問題的數(shù)學(xué)描述
飛機、防御導(dǎo)彈和攻擊導(dǎo)彈三方的平面相對運動關(guān)系如圖1所示,下標t,d和m表示其相關(guān)狀態(tài),其中a,v,γ,λ和R分別表示加速度、飛行速度、航向角、視線角和相對距離。結(jié)合圖1,三方的相對運動關(guān)系可表示為:

(1)

(2)

(3)

(4)

(5)

(6)
式中,vm,vt和vd滿足vm,vd>vt,目標具有速度上的劣勢。
圖1 三方平面相對運動關(guān)系
假設(shè)三方具有理想自動駕駛儀動態(tài)或機動動態(tài)(Maneuvering Dynamics),且機動有界
(7)
|ai|≤ai,max
(8)
式中,at,max,ad,max和am,max滿足am,max,ad,max>at,max,目標具有機動性能上的劣勢。
對式(5)和式(6)兩邊求導(dǎo),可以得到:
(9)
(atcos (γt-λd)-Δd)
(10)
其中:
amcos (γm-λdm)
(11)

(12)
式中,Δdm為防御導(dǎo)彈與攻擊導(dǎo)彈的徑向加速度和攻擊導(dǎo)彈的法向加速度在二者LOS法向上的分量;Δd為目標與防御導(dǎo)彈的徑向加速度在二者LOS法向上的分量。假設(shè)Δdm和Δd有界,當作干擾或不確定項處理:
|Δdm|≤Δ1
(13)
|Δd|≤Δ2
(14)
式中,Δi(i=1,2)未知。
2 協(xié)同滑模制導(dǎo)律推導(dǎo)
圖2為LOS制導(dǎo)期望的相對運動關(guān)系,防御導(dǎo)彈位于目標與攻擊導(dǎo)彈間的視線上,滿足
λm=λd=λdm=λ
(15)
使得目標與防御導(dǎo)彈和防御導(dǎo)彈與攻擊導(dǎo)彈間的視線方向保持一致,從而隨著防御導(dǎo)彈與攻擊導(dǎo)彈的不斷接近,實現(xiàn)對目標的保護。假設(shè)攻擊導(dǎo)彈可以對目標進行相關(guān)的量測和跟蹤,但無法獲取防御導(dǎo)彈的相關(guān)信息,這一假設(shè)符合實際,因為大多數(shù)的導(dǎo)彈只能夠?qū)λ櫟膯我荒繕诉M行攔截[5]。
圖2 三方平面LOS關(guān)系
基于LOS制導(dǎo)思想,結(jié)合圖1和圖2,取偏差σ=λdm-λd,則定義滑模面為:

(16)
由上式可得:
σ=σ0exp(-(t-t0)/ε)

(17)

(18)
其中:
(19)
(20)
(21)
(22)
(23)
(24)
(25)
(26)
(27)
自適應(yīng)律:
(28)
(29)

(30)
式中,κ為常數(shù)。
式(30)的含義為隨著防御導(dǎo)彈和攻擊導(dǎo)彈的不斷接近,對趨近于滑模面的速度進行調(diào)整,特別是當Rdm接近0時,可以避免視線角速度的發(fā)散,在一定程度上也可以緩解抖振。仿真中采用飽和函數(shù)近似代替符號函數(shù),以進一步削弱抖振的影響。
穩(wěn)定性分析:
定義Lyapunov函數(shù)
(31)
其中:
(32)
則:
=s(-ks-ηsgn (s)+α5Δm+α6Δd)-
≤-ks2-η|s|+α5|s|Δ1+α6|s|Δ2-
=-ks2
(33)


(34)
考慮機動有界,式(18)進一步修正為:
(35)

由式(35)可知,為實現(xiàn)防御導(dǎo)彈與目標之間的協(xié)同,前者所需的信息包括目標的加速度at、飛行速度Vt和航向角γt,以及二者之間的相對運動信息。控制命令的計算具有兩種可行方式:第一種為目標和防御導(dǎo)彈將相關(guān)信息傳輸給一個集中協(xié)調(diào)單元,如制導(dǎo)站等進行計算,并通過指令傳輸通道將控制命令傳輸?shù)椒烙鶎?dǎo)彈上;第二種方式為目標通過(單向)數(shù)據(jù)鏈或其它方式將相關(guān)信息直接傳輸給防御導(dǎo)彈,采用彈上計算的方式進行控制命令的計算。前一種方式類似于指令制導(dǎo),而后一種方式實時性更高,對于信息傳輸方式的具體實現(xiàn),仍需要進一步的研究。
3 仿真結(jié)果及分析
下面主要針對非機動目標和“Bang-Bang”機動目標的保護進行仿真研究。目標發(fā)射防御導(dǎo)彈,假設(shè)其初始位置為(xt=0,yt=0);攻擊導(dǎo)彈的初始位置為(xm=3 000 m,ym=4 000 m);三方的飛行速度分別為vt=300 m/s,vd=500 m/s,vm=500 m/s;γt=0°,γd=40°,γm=225°,γ1=γ2=0.1;ε=0.2;κ=4。仿真中假設(shè)攻擊導(dǎo)彈采用比例導(dǎo)引(Proportional Navigation, PN),機動無約束,目標和防御導(dǎo)彈機動有界,at,max=5g,ad,max∈{10g,15g}。
(1)目標非機動
假設(shè)目標非機動且保持當前航向飛行,此時若采用PN攔截目標則是最優(yōu)的[11],取ad,max=15g,仿真結(jié)果如圖3~圖6所示。其中,圖3和圖4為防御導(dǎo)彈分別采用所設(shè)計的協(xié)同自適應(yīng)滑模制導(dǎo)律CASD和PN制導(dǎo)律的三方飛行彈道。從圖中可以看出,兩種制導(dǎo)方法都可以實現(xiàn)對攻擊導(dǎo)彈的有效攔截,圖3中的目標與防御導(dǎo)彈和防御導(dǎo)彈與攻擊導(dǎo)彈間的視線逐漸趨于一致,最終的脫靶量分別為0.093 m和0.803 m,CASD性能較好。圖5為兩種制導(dǎo)方法的加速度變化曲線。由圖可見,CASD在初始階段以最大加速度運行以實現(xiàn)對飛行彈道的調(diào)整,由于與目標之間的協(xié)同,在約1.2 s后的加速度小于PN,整體性能優(yōu)于PN。圖6為CASD的誤差角,由圖可知,σ趨于0。
圖3 飛行彈道(CASD)
圖4 飛行彈道(PN)
圖5 防御導(dǎo)彈的加速度
圖6 誤差角(CASD)
圖7為取ad,max=10g情形下兩種制導(dǎo)律的加速度變化曲線。由圖可見,PN在約2.3 s后發(fā)生了嚴重的執(zhí)行飽和,從而使最終的脫靶量高達12.9 m,而CASD僅為0.096 m,可見CASD具有明顯的機動性能優(yōu)勢。
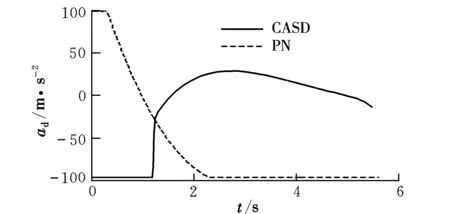
圖7 防御導(dǎo)彈的加速度
(2)目標“Bang-Bang”機動
該類型的機動是最優(yōu)的規(guī)避機動[12],假設(shè)目標只具有一次機動命令切換,時間為tsw=2.5 s,大小為at,max=5g,三方的實際飛行速度分別取為vt=290 m/s,vd=505 m/s,vm=520 m/s,即假設(shè)存在一定的飛行速度誤差,ad,max=10g,仿真結(jié)果如圖8~圖10所示。其中,圖8為三方的飛行彈道,最終的脫靶量為0.076 m,滿足了LOS制導(dǎo)的要求。圖9和圖10分別為防御導(dǎo)彈的加速度變化曲線和誤差角曲線。從圖中可以看出,制導(dǎo)律CASD不僅可以實現(xiàn)對攻擊導(dǎo)彈的有效攔截,且對其機動和三方的飛行速度誤差具有較強的魯棒性。
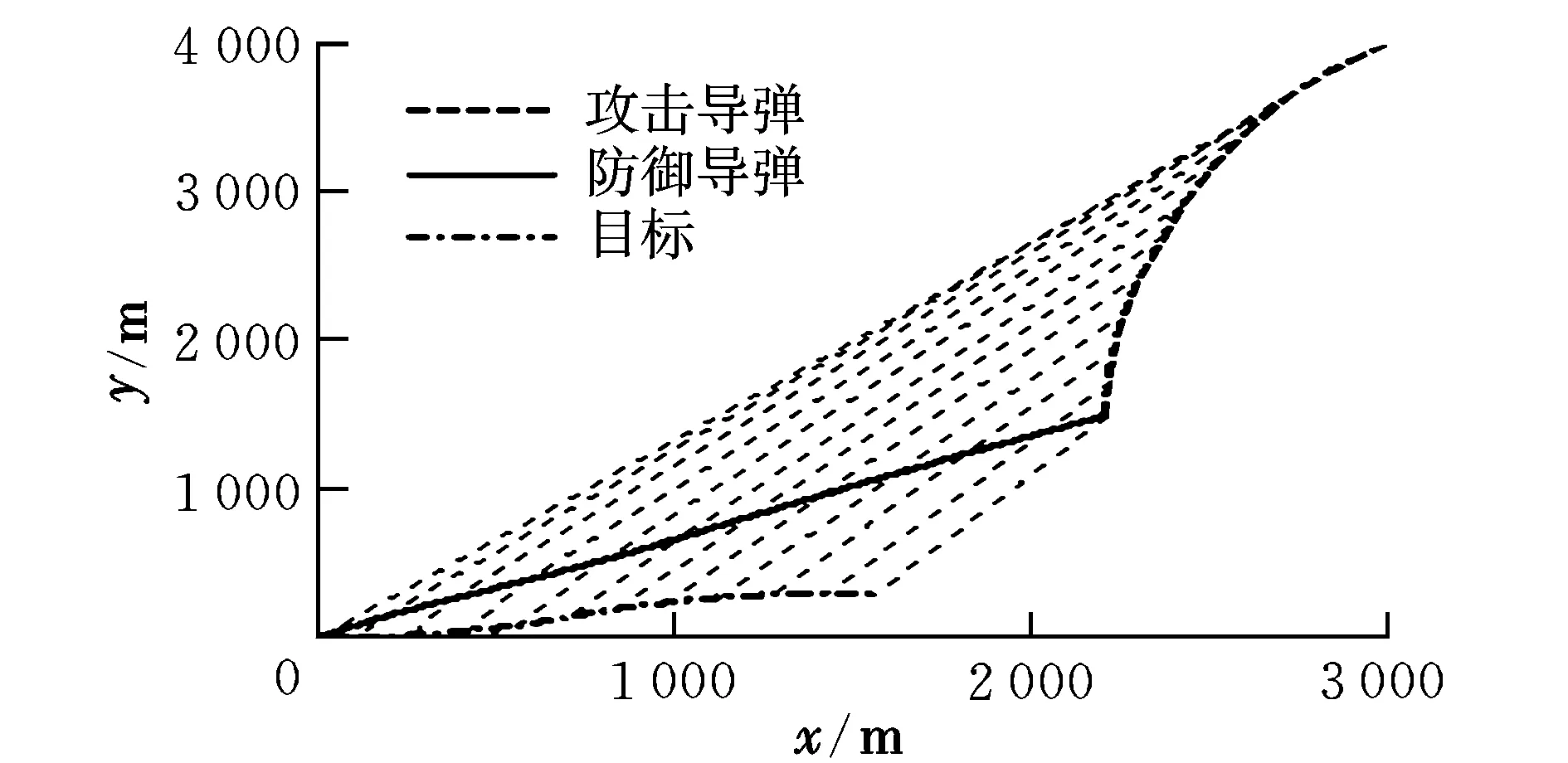
圖8 飛行彈道
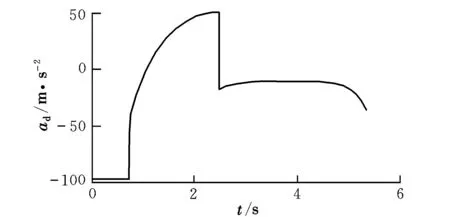
圖9 防御導(dǎo)彈的加速度
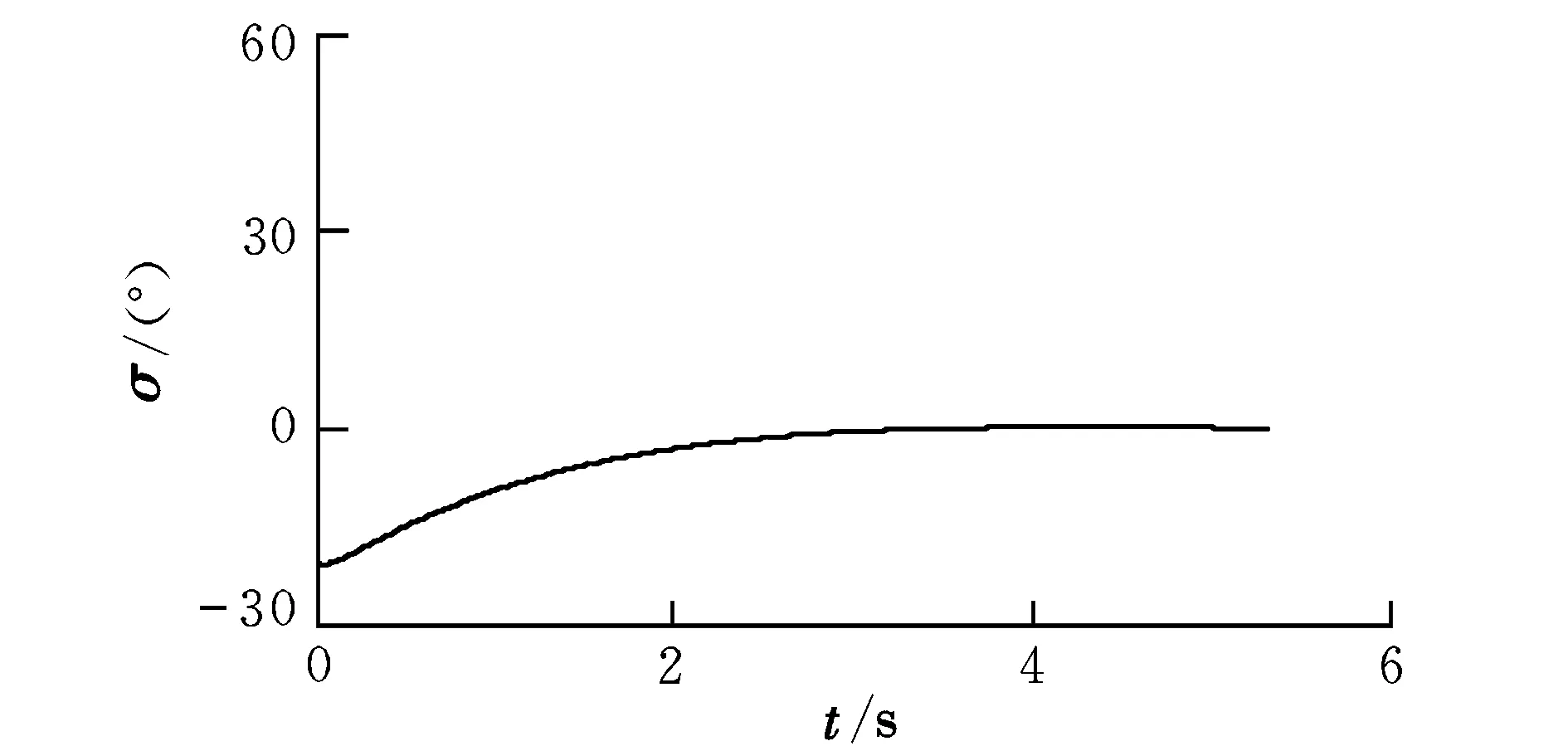
圖10 誤差角
4 結(jié)束語
基于滑模控制方法,設(shè)計了一種飛機與防御導(dǎo)彈協(xié)同對抗攻擊導(dǎo)彈的自適應(yīng)制導(dǎo)律,該制導(dǎo)律有效地滿足了LOS的制導(dǎo)要求,相比于PN制導(dǎo)律具有明顯的性能優(yōu)勢,且對三方飛行速度誤差和防御導(dǎo)彈機動具有較強的魯棒性。該制導(dǎo)律很容易擴展到三方具有高階機動動態(tài)和存在其它系統(tǒng)不確定性的情形。
[1] Asher R,Matuszewski J.Optimal guidance with maneuvering targets [J].Journal of Spacecraft,1974,11(3):204-206.
[2] Boyell L R.Defending a moving target against missile or torpedo attack [J].Transactions on Aerospace and Electronic Systems,1976,AES-12(4):522-526.
[3] Rusnak I.Acceleration requirements in defense against missile attack [C]//The 47th Israel Annual Conference on Aerospace Science.Tel Aviv,Israel,2007:1-6.
[4] Rusnak I.Guidance laws in defense against missile attack [C]//IEEE 25th Convention of Electrical and Electronic Engineers in Israel. Eilat,Israel,2008:90-94.
[5] Shaferman V,Shima T.Cooperative multiple model adaptive guidance for an aircraft defending missile [C]//AIAA Guidance,Navigation,and Control Conference.Toronto,Canada:AIAA Press,2010:1-25.
[6] Shinar J,Turetsky V,Oshman Y.Integrated estimation/guidance design approach for improved homing against randomly maneuvering targets [J].Journal of Guidance,Control,and Dynamics,2007,30(1):154-161.
[7] Shinar J,Shima T.Nonorthodox guidance law development approach for intercepting maneuvering targets [J].Journal of Guidance,Control,and Dynamics,2002,25(4):658-666.
[8] Ratnoo A,Shima T.Line of sight guidance for defending an aircraft [C]//AIAA Guidance,Navigation,and Control Conference.Toronto,Canada: AIAA Press,2010:1-22.
[9] Lee G T,Lee J G.Improved command to line-of-sight for homing guidance [J].Transactions on Aerospace and Electronic Systems,1995,31(1):506-510.
[10] Benshabat D G,Bar-Gill A.Robust command to line-of-sight guidance via variable-structure control [J].Transactions on Control Systems Technology,1995,3(3):356-361.
[11] Shima T,Golan O M.Linear quadratic differential games guidance law for dual controlled missiles [J].IEEE Transactions on Aerospace and Electronic Systems,2007,43(3):834-841.
[12] Shinar J,Steinberg D.Analysis of optimal evasive maneuvers based on a linearized two-dimensional kinematic model [J].Journal of Aircraft,1977,14(8):795-802.
Cooperativeguidancelawforactiveprotectionbasedonadaptivesliding-modecontrol
HUA Wen-hua1,2, CHEN Xing-lin2, SONG Chao3
(1.Department of Control System, Luoyang Electro-Optics Development Center, Luoyang 471009, China;2.School of Astronautics, Harbin Institute of Technology, Harbin 150001, China;3.The 10th Department, Tianjin Navigation Instrument Research Institute, Tianjin 300131, China)
As compared with the attacking missile, the aircraft has the disadvantages of flight velocity and maneuverability. To improve the survivability, the aircraft can launch a defending missile to intercept the attacker and correspondingly, a cooperative guidance law of defending missile is presented based on adaptive sliding-mode control. This guidance law is a kind of line of sight (LOS) guidance approach in essence, which guide the defending missile to locate inside the LOS between the aircraft and the attacking missile for active defense. Finally, simulations are carried out compared to proportional navigation. The results show that this guidance law has advantages of maneuvering performance and intercepting performance because of the cooperation with the aircraft and has strong robustness to the velocity variations of the three bodies and the maneuver of the attacking missile.
guidance law; adaptive sliding-mode control; cooperation; line of sight guidance
2011-04-11;
2011-08-24
黑龍江省科技攻關(guān)計劃基金資助(GZ06A104)
花文華(1983-), 男, 安徽淮北人, 博士研究生, 研究方向為飛行器制導(dǎo)。
TJ765.3
A
1002-0853(2012)01-0066-05
(編輯:姚妙慧)