繩系網(wǎng)捕系統(tǒng)的定位與測(cè)姿方法研究
2012-11-03 01:13:33胡真堅(jiān)鮮勇馮杰雷剛
飛行力學(xué) 2012年1期
胡真堅(jiān), 鮮勇, 馮杰, 雷剛
(第二炮兵工程學(xué)院 603教研室, 陜西 西安 710025)
繩系網(wǎng)捕系統(tǒng)的定位與測(cè)姿方法研究
胡真堅(jiān), 鮮勇, 馮杰, 雷剛
(第二炮兵工程學(xué)院 603教研室, 陜西 西安 710025)
基于雙目視覺(jué)原理,建立了空間目標(biāo)的三維坐標(biāo)計(jì)算模型,利用安裝在捕獲端的攝像頭對(duì)主星進(jìn)行觀測(cè),建立了捕獲端定姿方法。仿真算例驗(yàn)證了所提方法能夠以較高的測(cè)量精度實(shí)現(xiàn)定位和測(cè)姿,可以滿足繩系衛(wèi)星捕獲端的姿態(tài)確定精度需求。
繩系衛(wèi)星系統(tǒng); 雙目視覺(jué); 定位; 測(cè)姿
引言
繩系衛(wèi)星系統(tǒng)(Tethered Satellite System, TSS)是指由兩顆或兩顆以上的衛(wèi)星通過(guò)系繩相連所構(gòu)成的系統(tǒng)。該系統(tǒng)具有廣闊的應(yīng)用前景,如太空發(fā)電、人工重力、變軌飛行、處理太空垃圾以及大氣層的研究等[1-3]。目前有大量的學(xué)者對(duì)其控制方法進(jìn)行了研究[4-7],這些研究均是基于系繩參數(shù)精確已知的情況下開(kāi)展的,而在實(shí)際工程應(yīng)用中,要想實(shí)現(xiàn)捕獲端實(shí)時(shí)精細(xì)控制,必須掌握捕獲端的位置和姿態(tài)信息等參數(shù)。李強(qiáng)[8]針對(duì)應(yīng)力控制和速率控制方式,對(duì)珠式模型和不考慮系繩質(zhì)量和形狀特性的簡(jiǎn)化模型的動(dòng)力學(xué)特性進(jìn)行了仿真分析。仿真結(jié)果表明,無(wú)論采取何種控制方式,都會(huì)存在-10°~+10°的面內(nèi)角,且變化并不規(guī)律。目前主要存在以下兩個(gè)問(wèn)題:(1)繩系衛(wèi)星系統(tǒng)的系繩存在面內(nèi)、外角,將影響子星的姿態(tài);(2)子星在釋放過(guò)程中由于存在干擾,將引起姿態(tài)的變化。因此,捕獲端實(shí)時(shí)參數(shù)的獲得變得尤為重要。
T S Denney Jr[9]和M E Greene[10]考慮了以三軸張力計(jì)為測(cè)量信息,通過(guò)Kalman濾波方法完成對(duì)系繩的面內(nèi)、外角及其相應(yīng)角速率的估計(jì),但M E Greene的方法適用于面外擺角為小角度的情況,而T S Denney Jr的濾波算法適合用于系繩參數(shù)的離線估計(jì),對(duì)于系繩參數(shù)的實(shí)時(shí)估計(jì)將會(huì)由于計(jì)算量太大而無(wú)法實(shí)現(xiàn)。
目前,國(guó)內(nèi)外對(duì)于捕獲端姿態(tài)的研究并不多。本文基于雙目視覺(jué)原理,建立了空間目標(biāo)的三維坐標(biāo)計(jì)算模型,利用安裝在捕獲端的攝像頭對(duì)主星的觀測(cè)建立了捕獲端定姿方法。該方法精度較高,可以滿足捕獲端定姿的精度要求。
1 對(duì)捕獲端和非合作目標(biāo)的定位
為了實(shí)現(xiàn)雙目視覺(jué),對(duì)攝像機(jī)進(jìn)行如圖1所示的安裝。
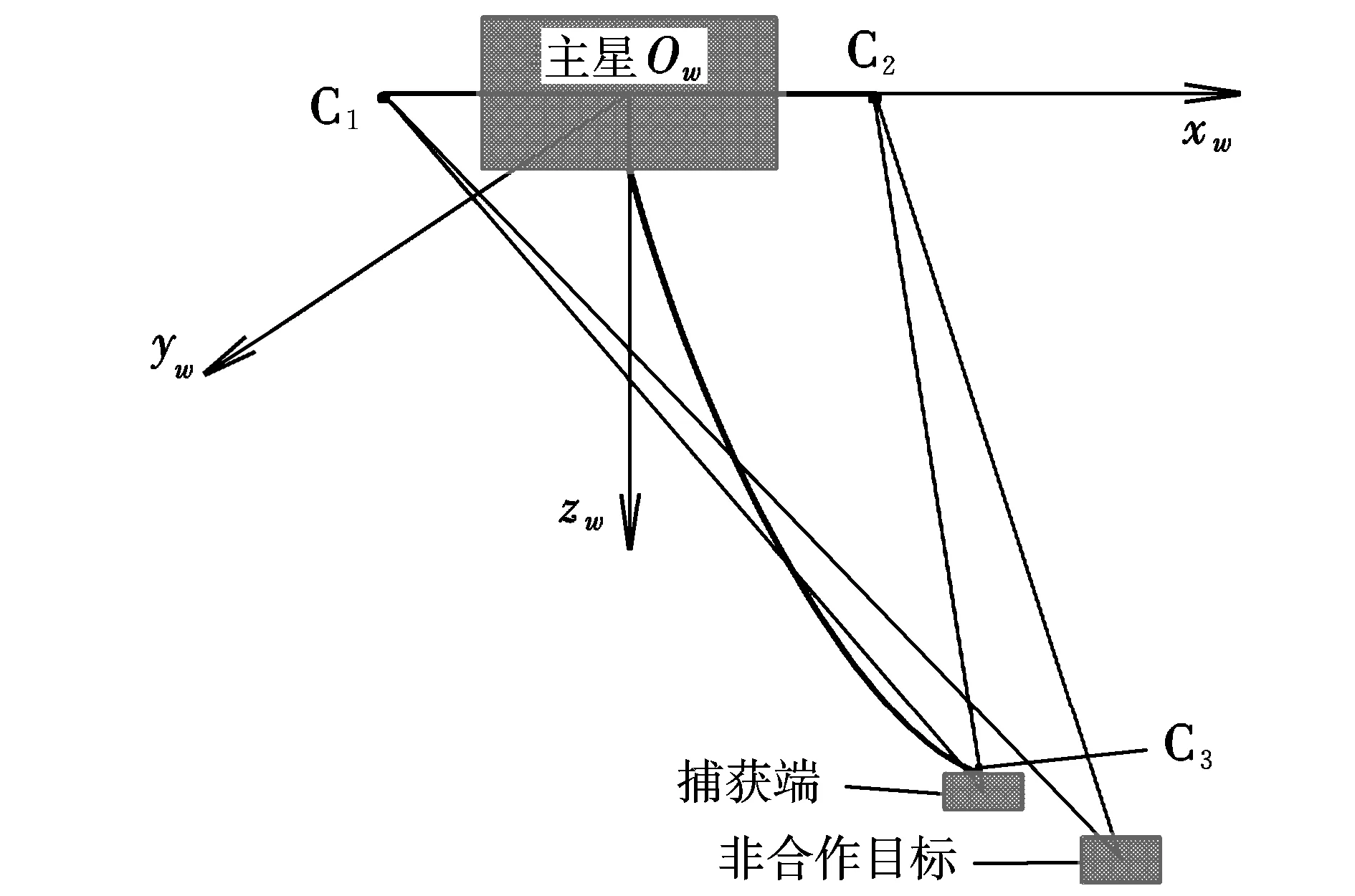
圖1 相對(duì)位置示意圖
建立以主星質(zhì)心為原點(diǎn)Ow的主星坐標(biāo)系Owxwywzw,在主星兩側(cè)安裝兩臺(tái)攝像機(jī)C1,C2,使Owxw軸過(guò)C1,C2的光心,Owzw軸指向地心方向,Owyw與Owxw,Owzw軸構(gòu)成右手直角坐標(biāo)系。在捕獲端安裝攝像機(jī)C3,使其光軸與捕獲端垂直,鏡頭朝向主星一側(cè),實(shí)現(xiàn)攝像機(jī)的定姿,具體實(shí)現(xiàn)方法在下節(jié)介紹。由中心透射原理可得空間點(diǎn)在主星的三維坐標(biāo)與像素坐標(biāo)之間的關(guān)系為:
式中,z為相機(jī)坐標(biāo)系中的坐標(biāo)值;u,v為像素坐標(biāo)系中的坐標(biāo)值;M1為相機(jī)內(nèi)部參數(shù),只與相機(jī)內(nèi)部結(jié)構(gòu)有關(guān);M2為相機(jī)外部參數(shù),只與相機(jī)相對(duì)于主星坐標(biāo)系的方位有關(guān);H為3×4矩陣,為透視變換矩陣。上式即為中心透射模型[11-12]。
若同時(shí)有兩個(gè)攝像機(jī)的多個(gè)對(duì)應(yīng)點(diǎn),即可形成雙目視覺(jué)的情況,如圖2所示。
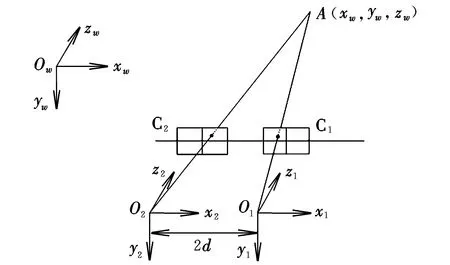
圖2 雙目視覺(jué)原理
安裝完攝像機(jī)后,在繩系衛(wèi)星系統(tǒng)發(fā)射前,在地面采用“TSAI”兩步標(biāo)定算法[13]分別對(duì)左右攝像機(jī)進(jìn)行標(biāo)定。在標(biāo)定過(guò)程中,設(shè)定主星坐標(biāo)系為世界坐標(biāo)系,獲得左右攝像機(jī)的內(nèi)部、外部參數(shù)。
利用最小二乘法計(jì)算空間目標(biāo)點(diǎn)A在主星坐標(biāo)系的三維坐標(biāo)[11-12]:
其中:
由此可知,如果已知相機(jī)的內(nèi)、外參數(shù),即矩陣H1,H2已知,對(duì)任何空間點(diǎn)A(包括捕獲端和非合作目標(biāo)),知道它在圖像像素坐標(biāo)系中的坐標(biāo)(u1,v1),(u2,v2),就可以由上式計(jì)算得到A在主星坐標(biāo)系的三維坐標(biāo),從而實(shí)現(xiàn)定位。
2 對(duì)捕獲端的測(cè)姿
繩系系統(tǒng)在空間飛行時(shí),系繩存在面內(nèi)角(α)和面外角(β),如圖3所示。
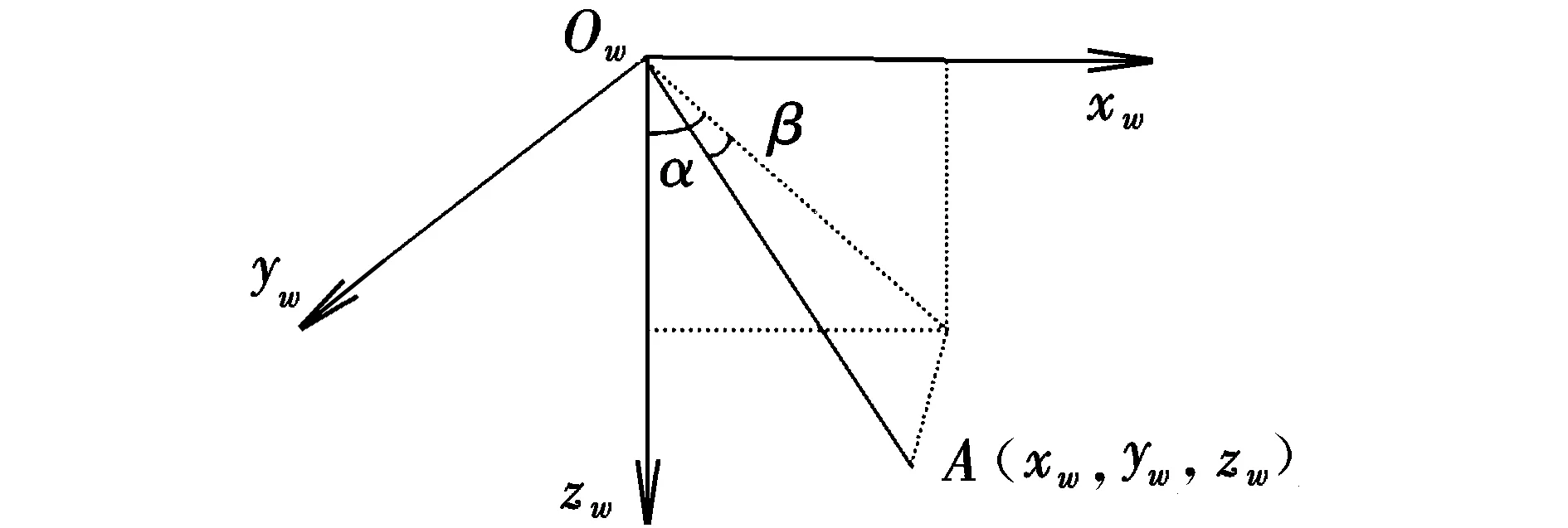
圖3 面內(nèi)、外角示意圖
否則,主星可以通過(guò)調(diào)姿,使C1,C2的光心位于軌道面內(nèi)。
建立捕獲端攝像機(jī)C3坐標(biāo)系,Oxyz為相機(jī)坐標(biāo)系,其原點(diǎn)位于C3的光心,Oy軸沿相機(jī)光軸方向,Ox,Oz軸與CCD成像平面邊緣平行。同時(shí)建立成像平面坐標(biāo)系Obxbzb,使xb∥x,zb∥z,如圖4所示。
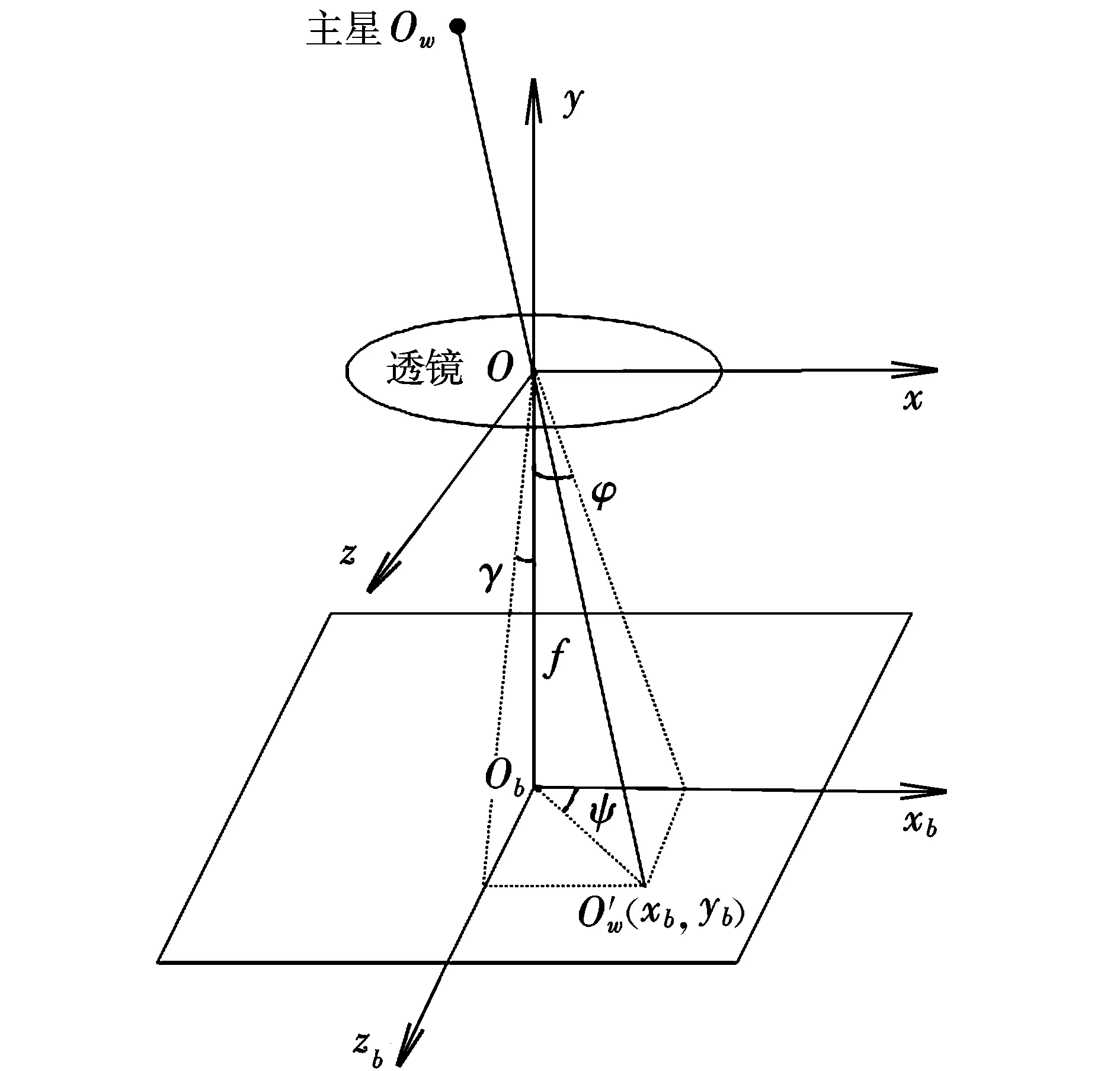
圖4 測(cè)姿原理圖
捕獲端的俯仰、偏航和滾動(dòng)角分別定義為:
俯仰角φ:視線主軸在xbOby平面的投影與相機(jī)光軸Oy的夾角。并規(guī)定視線主軸在xbOby平面的投影在Oy右側(cè)時(shí)(順著Obzb正方向看去),定義為正,反之為負(fù);
偏航角ψ:視線主軸在xbObzb平面的投影與Obxb軸的夾角。并規(guī)定視線主軸在xbObzb平面的投影在Obxb左側(cè)時(shí)(順著Obxb正方向看去),定義為正,反之為負(fù);
滾動(dòng)角γ:視線主軸在yObzb平面的投影與相機(jī)光軸Oy的夾角。并規(guī)定視線主軸在yObzb平面的投影在Oy左側(cè)時(shí)(順著Oy正方向看去),定義為正,反之為負(fù)。
若捕獲端攝像機(jī)C3的光軸與捕獲端垂直,且成像平面坐標(biāo)系的Obxb,Obzb軸與捕獲端邊緣平行,則φ,ψ,γ即為捕獲端的俯仰、偏航和滾動(dòng)角。
當(dāng)主星位于視線范圍內(nèi)時(shí),由圖中幾何關(guān)系可得:

式中,xb,zb為主星在攝像機(jī)C3中的像坐標(biāo)。當(dāng)φ=ψ=γ=0°時(shí),相機(jī)坐標(biāo)系Oxyz的Ox,Oz軸分別與主星坐標(biāo)系的Owxw,Owyw平行,Oy軸與Owzw重合。

式中,α,β以逆時(shí)針繞對(duì)應(yīng)軸旋轉(zhuǎn)為正,順時(shí)針為負(fù)。因此捕獲端自身的姿態(tài)角分別為:
3 測(cè)姿精度初步分析
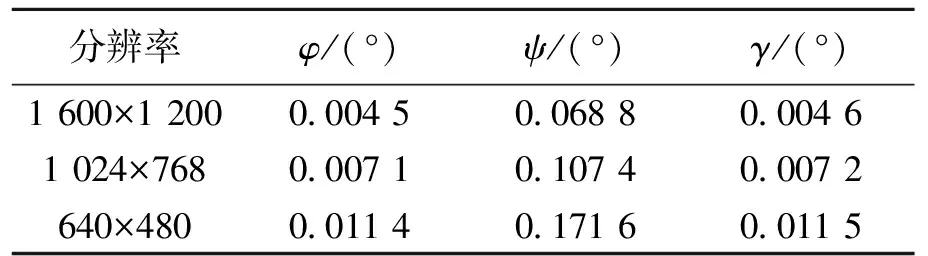
表1 測(cè)姿最小誤差分析
從表1可以看出,該方法測(cè)姿精度較高,并且精度隨著攝像機(jī)分辨率的提高而提高,同時(shí)φ和γ的測(cè)量精度高于ψ的測(cè)量精度。可以滿足繩系衛(wèi)星捕獲端的姿態(tài)確定精度需求。
4 結(jié)束語(yǔ)
本文基于雙目視覺(jué)原理,探索了繩系衛(wèi)星系統(tǒng)主星對(duì)捕獲端和非合作目標(biāo)的定位方法,建立了空間目標(biāo)的三維坐標(biāo)計(jì)算模型,并由此獲得系繩的面內(nèi)、外角。利用安裝在捕獲端的攝像機(jī),通過(guò)對(duì)主星的觀測(cè),實(shí)現(xiàn)了捕獲端自身姿態(tài)的確定。隨著繩系衛(wèi)星空間應(yīng)用的不斷拓展,對(duì)系統(tǒng)子星的定位和定姿將會(huì)越來(lái)越得到大家的關(guān)注。
[1] Mantri P,Mazzoleni A P,Padgett D A.Parametric study of deployment of tethered satellite systems[J].Journal of Spacecraft and Rockets,2007,44(2):412-424.
[2] 于紹華,劉強(qiáng).有分布質(zhì)量系繩的衛(wèi)星系統(tǒng)的動(dòng)力學(xué)[J].宇航學(xué)報(bào),2001,22(3):52-61.
[3] Kumar K D.Review of dynamics and control of non-electrodynamic tethered satellite systems [J].Journal of Spacecraft and Rockets,2006,43(4):705-720.
[4] Williams P.Optimal deployment/retrieval of tethered satellites[J].Journal of Spacecraft and Rockets,2008,45(2):324-343.
[5] Padgett D A,Mazzoleni A P.Analysis and design for no-spin tethered satellite retrieval[J].Journal of Guidance,Control,and Dynamics,2007,30(5):1516-1519.
[6] Williams P.Spacecraft rendezvous on small relative inclination orbits using tethers[J].Journal of Spacecraft and Rockets,2005,42(6):1047-1060.
[7] Williams P.Optimal deployment/retrieval of a tethered formation spinning in the orbital plane[J].Journal of Spacecraft and Rockets,2006,43(3):638-650.
[8] 李強(qiáng).空間繩系衛(wèi)星系統(tǒng)動(dòng)力學(xué)建模及仿真研究[D].長(zhǎng)沙:國(guó)防科學(xué)技術(shù)大學(xué),2007.
[9] Denney T S Jr,Greene M E.On state estimation for an orbiting single tether system[J].IEEE Transactions on Aerospace and Electronic Systems,1991,27(4):680-695.
[10] Greene M E,Denney T S Jr.Real-time estimator for control of an orbiting single tether system[J].IEEE Transactions on Aerospace and Electronic Systems,1991,27(6):880-883.
[11] 張娟,潘建壽,吳亞鵬,等. 基于雙目視覺(jué)的運(yùn)動(dòng)目標(biāo)跟蹤與測(cè)量[J].計(jì)算機(jī)工程與應(yīng)用,2009,45(25):191-194.
[12] 周子嘯,趙曉林,胡峰,等. 基于仿真機(jī)器人的雙目視覺(jué)定位[J].視頻應(yīng)用與工程,2010,34(08):106-109.
[13] Tsai R Y.A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses[J].IEEE Trans Rob Autom,1987,23(3):323-344.
Studyonthepositioningandposturemeasurementforthecaptureoftetheredsatellitesystem
HU Zhen-jian, XIAN Yong, FENG Jie, LEI Gang
(Faculty 603, The Second Artillery Engineering College, Xi’an 710025, China)
This article based on the principle of binocular vision, established a three-dimensional coordinate computation model, and by using camera which is fixed on the capture to observe the main-star to establish the methed for the posture of the capture. Simulation example of the proposed method can achieve high precision of positioning and posture measurement, which meets the requirements of posture measurement for the capture.
tethered satellite system; binocular vision principle; positioning; posture measurement
2011-03-24;
2011-08-04
國(guó)家863基金資助(2009AA7042005)
胡真堅(jiān)(1987-),男,浙江縉云人,碩士研究生,主要從事繩系衛(wèi)星動(dòng)力學(xué)與控制方面的研究。
V448.2
A
1002-0853(2012)01-0071-03
(編輯:姚妙慧)