基于TSM Server平臺(tái)的CPⅢ數(shù)據(jù)自動(dòng)化采集軟件的實(shí)現(xiàn)
2012-11-29 01:24:34張緒豐
鐵道勘察 2012年5期
張緒豐
(中鐵工程設(shè)計(jì)咨詢(xún)集團(tuán)有限公司,北京 100055)
1 概述
為了實(shí)現(xiàn)高速鐵路無(wú)砟軌道的高平順性,高速鐵路CPⅢ控制基準(zhǔn)的測(cè)量需要滿(mǎn)足較高的精度要求。通過(guò)理論與實(shí)踐的研究可知,CPⅢ測(cè)量具有外業(yè)數(shù)據(jù)采集工作量大,測(cè)量精度要求高的特點(diǎn)。因此,CPⅢ外業(yè)測(cè)量工作的自動(dòng)化和程序化能夠更好,更快的完成測(cè)量任務(wù)。本文結(jié)合CPⅢ外業(yè)采集的基本知識(shí),從軟件的計(jì)算原理、基本功能以及功能的實(shí)現(xiàn)等方面,對(duì)基于Trimble智能型全站儀開(kāi)發(fā)平臺(tái)TSM Sever的CPⅢ外業(yè)數(shù)據(jù)采集軟件的實(shí)現(xiàn)進(jìn)行闡述。
2 CPⅢ外業(yè)采集的基本知識(shí)
CPⅢ平面網(wǎng)測(cè)量外業(yè)數(shù)據(jù)采集的方法是自由測(cè)站邊角交會(huì)法,CPⅢ網(wǎng)形如圖1所示。
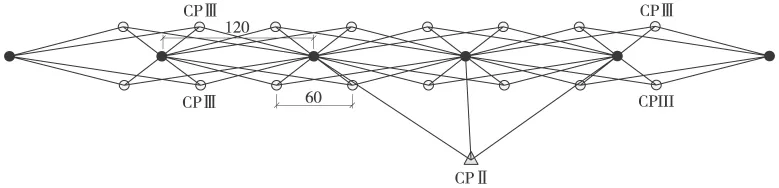
圖1 CPⅢ網(wǎng)形示意(單位:m)
由圖1可以看出,CPⅢ點(diǎn)間距為50至60m,每個(gè)測(cè)站架設(shè)在線路中線,觀測(cè)6對(duì)CPⅢ點(diǎn),測(cè)站間距約為120m。相鄰測(cè)站要重復(fù)觀測(cè)3對(duì)CPⅢ點(diǎn),從而保證每個(gè)CPⅢ點(diǎn)至少被觀測(cè)3次。外業(yè)測(cè)量時(shí),為了提高作業(yè)效率,可以?xún)H觀測(cè)學(xué)習(xí)上一測(cè)站的任意兩個(gè)重復(fù)CPⅢ點(diǎn),利用后方交會(huì)的方法可計(jì)算得到當(dāng)前測(cè)站點(diǎn)的坐標(biāo)信息,利用當(dāng)前測(cè)站和各重復(fù)目標(biāo)點(diǎn)的坐標(biāo)信息,推算出當(dāng)前測(cè)站與重復(fù)點(diǎn)的水平方向和天頂距,從而完成重復(fù)點(diǎn)的學(xué)習(xí)測(cè)量。
重復(fù)點(diǎn)學(xué)習(xí)測(cè)量完畢后,再對(duì)當(dāng)前測(cè)站上剩余的CPⅢ點(diǎn)進(jìn)行觀測(cè)學(xué)習(xí),最后采集軟件即可對(duì)當(dāng)前測(cè)站的CPⅢ點(diǎn)進(jìn)行自動(dòng)觀測(cè)。
3 TSM Server
3.1 TSM Server的構(gòu)架
由圖 2可知,TSM Server主要由 Survey ToolsServer、DeviceManager和 GenericDevice 三部分構(gòu)成。全站儀的開(kāi)發(fā)主要采用GenericDevice中TotalStation的相關(guān)指令進(jìn)行的。
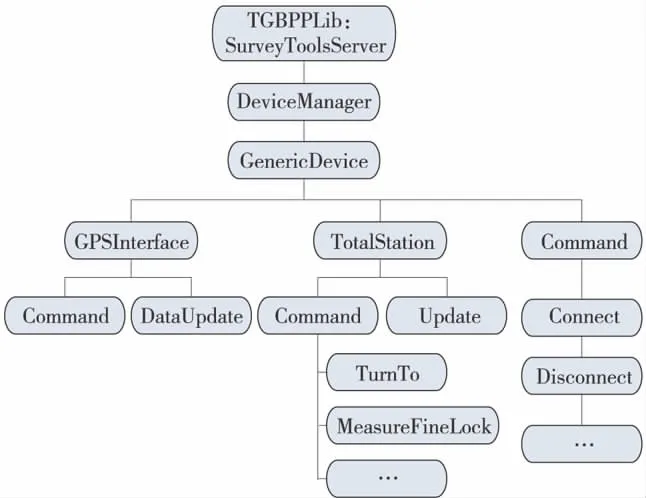
圖2 TSM Server構(gòu)架
3.2 TSM Server的開(kāi)發(fā)流程
由圖3可知,TSM Server的開(kāi)發(fā)首先要初始化COM Server,實(shí)例化一個(gè)回調(diào)類(lèi)并關(guān)聯(lián)到通訊類(lèi)中。然后,啟動(dòng)Device Manager實(shí)例以便進(jìn)行設(shè)備的載入和連接。最后,調(diào)用成員函數(shù)進(jìn)行具體的操作。例如,通訊參數(shù)的設(shè)置、儀器的連接與斷開(kāi)、執(zhí)行測(cè)量操作、接收測(cè)量數(shù)據(jù)等。
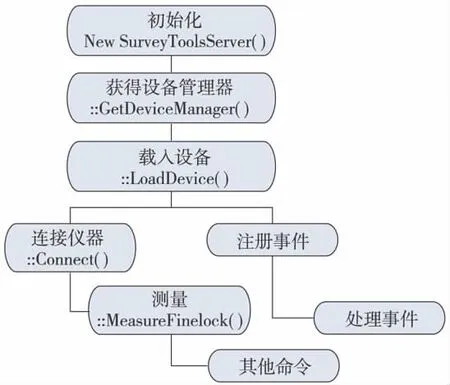
圖3 TSM Server開(kāi)發(fā)流程圖
4 軟件基本功能
4.1 數(shù)據(jù)質(zhì)量控制
進(jìn)行CPⅢ平面網(wǎng)外業(yè)數(shù)據(jù)采集時(shí)應(yīng)按如圖4所示界面中對(duì)總測(cè)回?cái)?shù)、2C限差等觀測(cè)參數(shù)進(jìn)行設(shè)置。這些參數(shù)將在自動(dòng)觀測(cè)中指導(dǎo)軟件進(jìn)行多測(cè)回方向和距離的觀測(cè),并實(shí)時(shí)判斷觀測(cè)數(shù)據(jù)是否超限。
此外,經(jīng)過(guò)理論分析與實(shí)驗(yàn)論證可知,CPⅢ平面網(wǎng)采用半盤(pán)位觀測(cè)的方式進(jìn)行數(shù)據(jù)采集,同樣可以滿(mǎn)足CPⅢ平面網(wǎng)的建網(wǎng)精度。因此,軟件具有全盤(pán)位與半盤(pán)位觀測(cè)方式的切換功能。

圖4 參數(shù)設(shè)置
4.2 自動(dòng)化數(shù)據(jù)采集
軟件完成點(diǎn)位學(xué)習(xí),即可對(duì)目標(biāo)點(diǎn)進(jìn)行自動(dòng)照準(zhǔn)并測(cè)量,完全實(shí)現(xiàn)無(wú)需人工干預(yù)的自動(dòng)化和智能化采集。同時(shí),在自動(dòng)測(cè)量過(guò)程中,軟件可以根據(jù)圖4所示界面設(shè)置好的參數(shù),對(duì)獲取測(cè)量數(shù)據(jù)的質(zhì)量進(jìn)行實(shí)時(shí)控制,能夠?qū)崿F(xiàn)超限報(bào)警,如圖5和圖6所示。
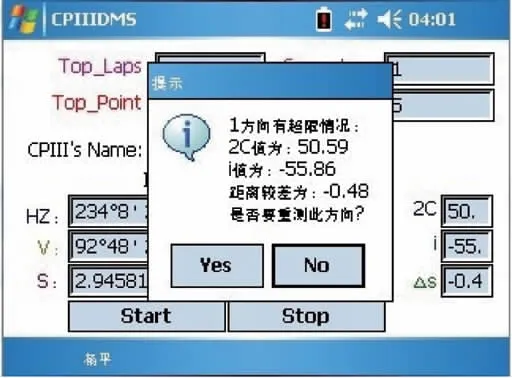
圖5 數(shù)據(jù)質(zhì)量控制(一)
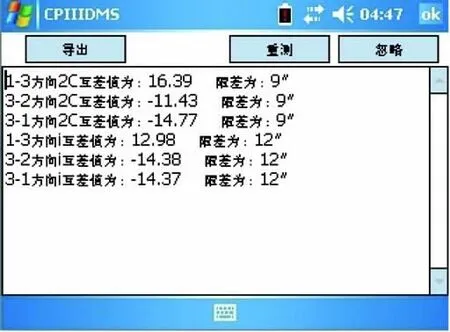
圖6 數(shù)據(jù)質(zhì)量控制(二)
4.3 數(shù)據(jù)的輸出與保存
為確保外業(yè)觀測(cè)數(shù)據(jù)的完整性與準(zhǔn)確性,軟件會(huì)將觀測(cè)數(shù)據(jù)自動(dòng)保存為*.SUC文本文件的加密文件格式。這樣可以有效避免觀測(cè)數(shù)據(jù)由于未知原因損失或者被修改。
5 軟件計(jì)算原理及實(shí)現(xiàn)的關(guān)鍵技術(shù)
5.1 軟件的計(jì)算原理
根據(jù)CPⅢ平面網(wǎng)的測(cè)量方法和測(cè)量網(wǎng)型,可通過(guò)極坐標(biāo)法與后方交會(huì)法計(jì)算出相鄰測(cè)站重復(fù)目標(biāo)點(diǎn)的學(xué)習(xí)數(shù)據(jù),這樣可減輕外業(yè)的勞動(dòng)強(qiáng)度,極大地提高CPⅢ外業(yè)數(shù)據(jù)的采集效率。
(1)極坐標(biāo)法計(jì)算
軟件首先建立一個(gè)獨(dú)立坐標(biāo)系,坐標(biāo)系的原點(diǎn)為第一個(gè)測(cè)站點(diǎn)P,假設(shè)其坐標(biāo)為(0,0),觀測(cè)得到PA的水平方向值為其方位角,根據(jù)式(1)極坐標(biāo)法計(jì)算公式即可得到A點(diǎn)的坐標(biāo)。同理,可得到其他CPⅢ點(diǎn)在坐標(biāo)系中的坐標(biāo)(如圖7所示)。

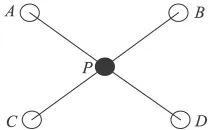
圖7 極坐標(biāo)計(jì)算原理
(2)后方交會(huì)計(jì)算
學(xué)習(xí)任意兩個(gè)重復(fù)點(diǎn)m(xMyM),N(xN,yN),得到水平方向觀測(cè)值LM,LN,根據(jù)式(2)的后方交會(huì)計(jì)算公式,可以得到新測(cè)站點(diǎn)O在獨(dú)立坐標(biāo)系中的坐標(biāo),然后即可利用剩余重復(fù)點(diǎn)坐標(biāo)與測(cè)站點(diǎn)O的坐標(biāo)反算水平方向值,以便軟件完成自動(dòng)照準(zhǔn)及自動(dòng)化采集(如圖8所示)。

式中:l為L(zhǎng)M在MN上的投影;h為O點(diǎn)到MN距離。
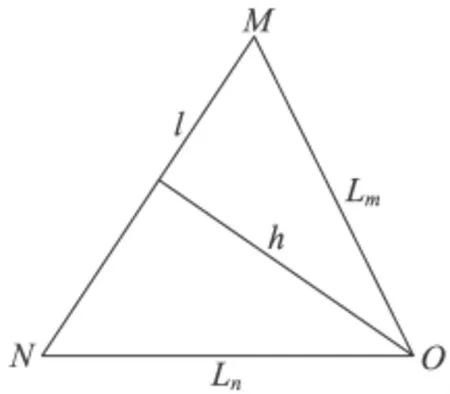
圖8 后方交會(huì)計(jì)算原理
5.2 多線程技術(shù)與事件委托的應(yīng)用
(1)線程的應(yīng)用
啟動(dòng)線程:
Thread measuring=new Thread(new ThreadStart(CPⅢmeasure));
measuring.Start();
實(shí)現(xiàn)“暫停”和“繼續(xù)”:
ManualResetEvent PauseEvent=new ManualResetEvent(true);
PauseEvent.Reset();
PauseEvent.Set();
(2)委托的應(yīng)用
軟件中通過(guò)委托調(diào)用自定義的方法,解決了線程中調(diào)用控件的問(wèn)題。
實(shí)現(xiàn)字符串chs和fxs在textBox11和textBox12中的顯示。
6 結(jié)束語(yǔ)
TSM Server是Trimble S8智能型全站儀底層開(kāi)發(fā)接口,包含了TotalStation中相關(guān)指令和函數(shù)。通過(guò)這些指令和函數(shù)與智能型全站儀相連,實(shí)時(shí)控制全站儀進(jìn)行外業(yè)數(shù)據(jù)自動(dòng)采集,對(duì)采集獲取的測(cè)量數(shù)據(jù)進(jìn)行實(shí)時(shí)的計(jì)算處理,顯示超限信息,捕捉操作錯(cuò)誤,及時(shí)通知用戶(hù)采取相應(yīng)措施,最后形成準(zhǔn)確可靠的測(cè)量數(shù)據(jù)。基于Trimble智能型全站儀開(kāi)發(fā)平臺(tái)Sever的CPⅢ數(shù)據(jù)自動(dòng)化采集軟件具有界面友好、操作簡(jiǎn)單、實(shí)時(shí)檢查數(shù)據(jù)質(zhì)量、自動(dòng)化數(shù)據(jù)采集和多種數(shù)據(jù)保存格式等特點(diǎn),不但有效解決了客運(yùn)專(zhuān)線無(wú)砟軌道施工控制網(wǎng)數(shù)據(jù)采集中測(cè)量任務(wù)繁重、觀測(cè)數(shù)據(jù)精度要求高等問(wèn)題,而且對(duì)現(xiàn)有的自動(dòng)化采集軟件進(jìn)行了優(yōu)化,進(jìn)一步提高了外業(yè)觀測(cè)的效率,加入了新的觀測(cè)模式,是對(duì)現(xiàn)行觀測(cè)技術(shù)方法的重要補(bǔ)充,對(duì)提高野外測(cè)量工作效率有重要的意義。
[1]武漢大學(xué)測(cè)繪學(xué)院測(cè)量平差學(xué)科組.誤差理論與測(cè)量平差基礎(chǔ)[M].武漢:武漢大學(xué)出版社,2003
[2]周東衛(wèi).應(yīng)用智能型全站儀與PDA掌上電腦實(shí)現(xiàn)CPⅢ數(shù)據(jù)自動(dòng)化采集[J].鐵道勘察,2008(6)
[3]王鵬,劉成龍,楊希.無(wú)碴軌道CPⅢ自由設(shè)站邊角交會(huì)網(wǎng)平差概略坐標(biāo)計(jì)算方法研究[J].鐵道勘察,2008(3):26-28
[4]劉成龍,楊友濤,徐小左.高速鐵路CPⅢ交會(huì)網(wǎng)必要測(cè)量精度的仿真計(jì)算[J].西南交通大學(xué)學(xué)報(bào),2009(2)
猜你喜歡
北京測(cè)繪(2020年12期)2020-12-29 01:37:18
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級(jí))(2017年10期)2017-11-08 08:39:45
電測(cè)與儀表(2016年9期)2016-04-12 00:29:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
吉林地質(zhì)(2014年3期)2014-03-11 16:47:31
河南科技(2014年22期)2014-02-27 14:18:08