基于差分的磁偶極子單點張量定位方法
2012-12-01 02:11:36隨陽軼劉麗敏
探測與控制學報 2012年5期
李 光,隨陽軼,劉麗敏,林 君
(吉林大學儀器科學與電氣工程學院,吉林 長春 130026)
0 引言
根據磁場的疊加原理,磁偶極子作為最基本的磁單元,目前已被廣泛應用于磁性目標的建模及定位當中[1-6]。Wynn于1971年提出了利用磁張量對磁偶極子進行定位跟蹤的算法[2]。磁張量方法具有很多磁總場、磁矢量方法所沒有的優點如受磁化方向影響小、具有較多的細節能夠用于三維定量反演解釋等,在軍事、環境、資源勘探等方面有著廣闊的應用前景[7]。常規采用單點測量的磁場矢量及磁張量數據對磁偶極子進行定位的方法,由文獻[8—10]分別得出,與其他定位方法相比只需要單點觀測即可達到定位的目的,能夠減少解的非唯一性,不需要增加更多的觀測量[11],卻受地磁場干擾大,極大地限制了其應用范圍[5]。基于此,本文提出了基于差分的消除地磁場干擾的磁偶極子單點張量定位方法。
1 單點磁張量定位
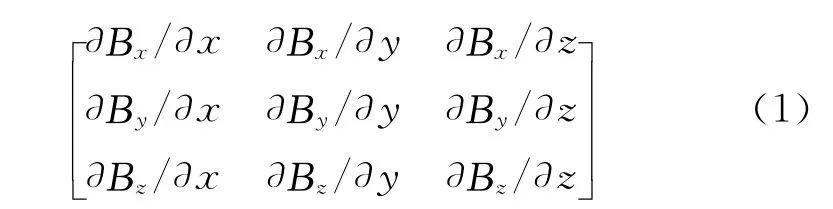
磁場的三個分量 (Bx,By,Bz)在空間xyz三個方向的導數構成了磁張量,共包括九個要素[2],記為G,表示如下:

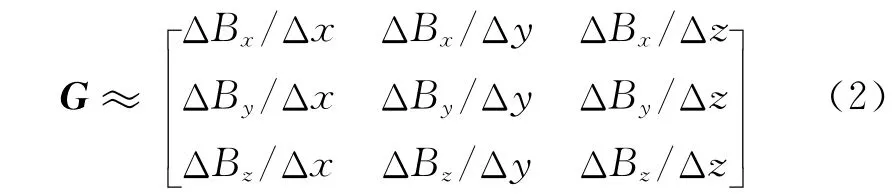
在現實測量中,可以利用差分來替代微分:
由Maxwell方程可知,B場的散度及旋度為零,即張量矩陣具有無跡性與對稱性,得:

由文獻[8—10]推導出磁偶極子的位置信息與單點處所測量的磁場矢量及磁張量之間的線性關系。通過設計出相應的磁張量系統結構如圖1所示,坐標系采用大地坐標系即x向為正北方向,y向為正東方向,z向為垂直向下,在未考慮地磁場干擾的情況下驗證了其可行性[4]。
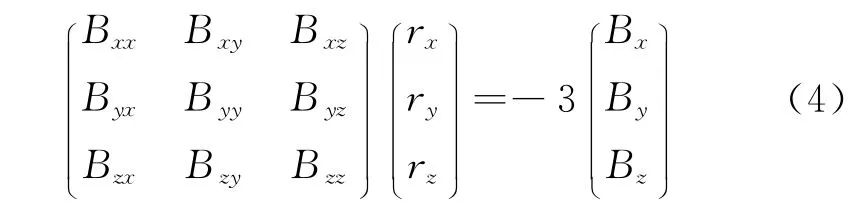
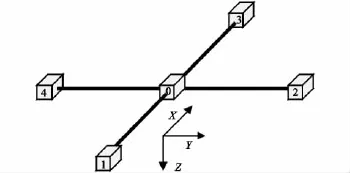
圖1 磁張量系統結構Fig.1 Structure of magnetic tensor system
由式(4)可知,在已知某點處磁張量的九個要素及相應的磁偶極子所產生的三分量磁場值Bx,By,Bz就可得到磁偶極子的位置信息,如式(5)所示。
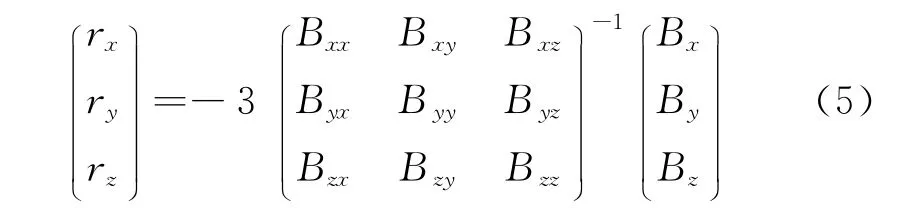
式(5)即為原方法的定位理論,但是由于Bx,By,Bz為磁偶極子在某一點處所產生的磁場矢量,在地磁場存在的情況下,很難獲得其測量值,極大地限制了其應用范圍,本文通過采用差分的方法,能夠消除地磁場及其他共模干擾,增加了其在現實探測中的實用性。
2 基于差分的單點磁張量定位
為了能夠消除地磁場及其他共模干擾的影響,則必須消除式(5)中磁場矢量項,本文采用差分的方法并設計出相應的磁張量測量系統,實現這一想法。
2.1 磁張量測量系統
為了便于闡述,本文先給出所設計的磁張量系統(如圖2所示),它是由6個高精度矢量傳感器構成,且處于同一平面內,相鄰傳感器的間距為d,圖2所示M為磁偶極子的磁矩矢量,r中的rx,ry,rz為定位所要求取的參數值,所示坐標系為大地坐標系。

圖2 磁張量系統定位示意圖Fig.2 Positioning Diagram of Magnetic Tensor System
2.2 基于差分的單點張量定位原理
Bxi,Byi,Bzi:第i探頭處磁場分量值,i=0,…,5。
Bxxi,Bxyi,Bxzi,Byxi,Byyi,Byzi,Bzxi,Bzyi,Bzzi:第i探頭處的9個張量值,i=0,…,5。
Bxxxi,Bxyxi,Bxzxi,Byxyi,Byyyi,Byzyi,Bzxzi,Bzyzi,Bzzzi:第i探頭處磁場的三階導數值,i=0,…,5。
rx,ry,rz:磁偶極子位置的三個分量。
式(4)兩邊分別對x,y,z求導,得:
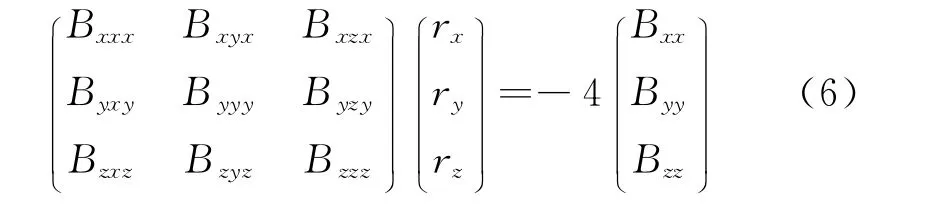
由方程組(3)可知,Bxyx=Byxx,Bxzx=Bzxx,Byxy=Bxyy,Byzy=Bzyy,因此可以通過0探頭、1探頭及3探頭得到Bxxx0,Bxyx0,Bxzx0,Bxx0。同理,由0探頭、2探頭及4探頭得到Byxy0,Byyy0,Byzy0,Byy0。以下以0探頭、1探頭及3探頭的x軸分量Bx0,Bx1,Bx3求取Bxxx0,Bxx0為例進行說明。
已知0探頭、1探頭及3探頭測得的磁場x軸分量Bx0=Bx(x0),Bx1=Bx(x0-d),Bx3=Bx(x0+d)得:
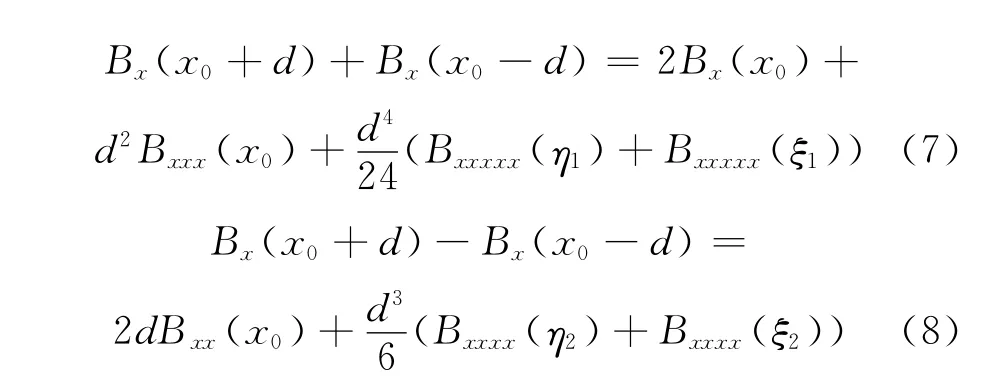
由于Bxx+Byy+Bzz=0可知,式(6)中只有2個是有效的,取:

由0探頭,1探頭及5探頭所測得的x軸分量得1探頭處的Bxxx1,Bxyx1,Bxzx1,Bxx1,可知下式成立:Bxxx1rx+Bxyx1ry+Bxzx1ry=-4Bxx1+Bxxx1d (13)
綜合式(11)、式(12)、式(13),我們能夠得到rx、ry、rz的值:
可以看出式(14)對式(5)進行了改進,在式(14)中消除了磁場矢量項,利用差分的方法將式(14)右邊所有的量均轉化為磁場矢量的相應磁場分量之差,故在大程度上消除了地磁場以及其他共模干擾。
3 仿真及誤差分析
將磁異常體等效成磁偶極子,并放置于坐標原點處,磁張量系統處于(10,10,-10)點處,取基線長度為d=0.2m。假設地磁場的總場為50 000nT,取長春地區磁傾角、磁偏角分別為I=60°,D=-9°。不失一般性,取磁偶極子磁傾角、磁偏角分別為I=45°,D=45°。通過分析在不消除地磁場;利用基站消除地磁場,考慮距離的影響;利用基站消除地磁場,考慮系統運動造成的影響,對比原方法與本文方法的定位結果,并以所得到的rx、ry、rz與理想rx、ry、rz的絕對誤差進行分析。
3.1 不消除地磁場
在不消除地磁場的情況下,認為系統中間點處矢量傳感器測得的磁場為磁偶極子所產生的磁場。磁偶極子的磁矩大小由M=2×102A·m2到M=2×104A·m2變化,兩種方法的定位誤差如圖3所示。
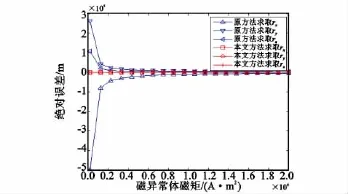
圖3 磁矩改變,兩種定位方法的定位誤差Fig.3 Changes in magnetic moment,the positioning error of two positioning methods
由圖3可知,本文提出的定位方法能夠有效地消除地磁場,不受磁矩大小變化的影響,且具有較高的定位精度,rx,ry,rz的定位誤差分別為0.000 4 m,0.000 4m,0.002 2m。原方法的定位誤差會隨著磁矩的增大而減小,而當磁矩大小為M=2×104A·m2時,定位誤差也達到上千米,可見在不消除地磁場的情況下,利用原方法進行定位是不可行的。
3.2 消除地磁場,考慮距離的影響
將與磁張量系統相距一定距離的基站測得的磁場矢量作為地磁場的測量值,系統中間點處測得的磁場矢量減去基站所測得的磁場矢量作為測得的磁偶極子產生的磁場矢量值,取地磁場總場梯度為0.02nT/m。
當磁偶極子磁矩大小為M=2×103A·m2時,兩種方法定位誤差受距離變化的影響,如圖4所示。
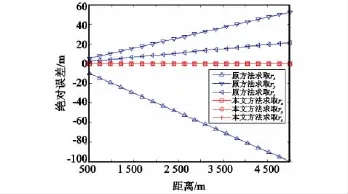
圖4 距離改變,兩種定位方法的定位誤差Fig.4 Changes in distance,the positioning error of two positioning methods
當系統與基站相距1km時,磁偶極子的磁矩大小由M=2×102A·m2到 M=2×104A·m2變化,兩種方法的定位誤差,如圖5所示。
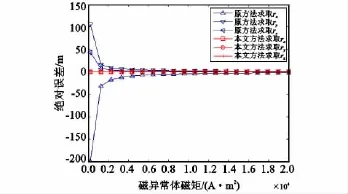
圖5 磁矩改變,兩種定位方法的定位誤差Fig.5 Changes in magnetic moment,the positioning error of two positioning methods
由圖4、圖5可知,本文提出的定位方法不需要利用基站來消除地磁場,不受磁矩大小變化的影響,且具有較高的定位精度,rx,ry,rz的定位誤差分別為0.000 4m,0.000 4m,0.002 2m。而原方法由于受地磁場梯度的影響,在地磁場梯度一定時,其定位誤差與基站的距離成正比,受磁矩的影響較大,當距離為1km,磁偶極子的磁矩大小為M=2×103A·m2時,rx,ry,rz的定位誤差分別為-19.965 7 m,10.501 9m,4.297 7m,因此利用基站來消除原方法中地磁場的干擾也是不可行的。
3.3 消除地磁場,考慮系統運動的影響
在假設地磁場梯度為0,利用基站能夠消除地磁場的情況下,考慮系統運動,姿態發生變化,下面以橫滾角的變化為例進行說明。
磁偶極子的磁矩大小為M=2×103A·m2時,兩種方法的定位誤差受橫滾角的影響,如圖6所示。

圖6 橫滾角變化,兩種定位方法的定位誤差Fig.6 Changes in roll angle,the positioning error of two positioning methods
當系統橫滾角為0.05°時,磁偶極子磁矩大小由M=2×102A·m2到M=2×104A·m2變化,兩種方法的定位誤差,如圖7所示。
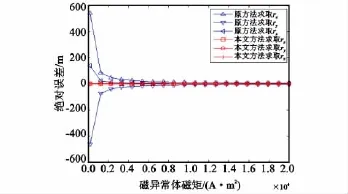
圖7 磁矩改變,兩種定位方法的定位誤差Fig.7 Changes in magnetic moment,the positioning error of two positioning methods
由圖6、圖7可知,本文提出的定位方法具有較高的定位精度,且不受磁矩大小的影響。系統在地磁場中運動,橫滾角變化較小時,兩種方法的定位誤差均與橫滾角成正比,而原方法的定位誤差受橫滾角及磁矩的影響較大。當橫滾角為0.05°,磁偶極子的磁矩大小為M=2×103A·m2時,原方法求取的rx,ry,rz定位誤差分別為54.201 5m,-46.415 1 m,13.802 0m,而本文方法求取的rx,ry,rz定位誤差分別為0.418 2m,-0.596 6m,-0.428 4m,可見原方法在地磁場存在的情況下,基本無法在運動平臺上應用。
4 結論
本文通過對原單點磁張量定位中利用磁場矢量及磁張量數據進行磁偶極子定位的方法進行改進,提出基于差分消除地磁場干擾的磁偶極子單點磁張量定位方法,進而設計出基于該定位方法的磁張量測量系統。通過仿真可知,在地磁場存在的情況下原方法基本無法實現磁偶極子的定位,而本文的定位方法由于采用差分方式,有效地消除了地磁場及其他共模干擾,具有較高的定位精度。本文方法也存在一些不足,需要進一步的完善,由其定位原理可知,系統的定位精度受非共模干擾,如磁矢量傳感器之間的不一致性,系統結構的安裝誤差等影響大,因此需要對它們進行校正,國內外在這方面已經有一些很好的嘗試[12-13],這些工作正是以后的研究重點。
[1]Wynn W,Frahm C,Carroll P,et al.Advanced superconducting gradiometer/magnetometer arrays and a novel signal processing technique[J].Magnetics,IEEE Transactions on,1975,11(2):701-707.
[2]Wynn W M.Magnetic dipole localization using the gradient rate tensor measured by a five-axis magnetic gradiometer with known velocity[C]//Orlando,FL.USA:SPIE,1995.
[3]唐勁飛,龔沈光,王金根.磁偶極子模型下目標定位和參數估計的兩種新方法[J].電子學報,2003(1):154-157.TANG Jinfei,GONG Shenguang,WANG Jingen.Two new magnetic localization and parameter estimation methods under the dipole model[J].Acta Electronica Sinica,2003(1):154-157.
[4]張朝陽,肖昌漢,閻輝.磁性目標的單點磁梯度張量定位方法[J].探測與控制學報,2009(4):44-48.ZHANG Zhaoyang,XIAO Changhan,YAN Hui.Localiza-tion of a magnetic object based on magnetic gradient tensor at a single point[J].Journal of Detection & Control,2009(4):44-48.
[5]Niu Jun,Teng Baohua,Yin Wenzhao.Localization of a single-point magnetic target in the special geomagnetic field[C]//Third International conference on Measuring Technology and Mechatronics Automation,2011:411-417.
[6]楊明明,劉大明,連麗婷,等.用海面磁偶極子源定位海底矢量磁傳感器[J].探測與控制學報,2011,33(5):41-45.YANG Mingming,LIU Daming,LIAN Liting,et al.Underwater vector-magnetometer located by using magnetic dipole sources in the offing[J].Journal of Detection &Control,2011,33(5):41-45.
[7]吳招才,劉天佑.磁力梯度張量測量及應用[J].地質科技情報,2008(3):107-110.WU Zhaocai,LIU Tianyou.Magnetic gradient tensor:its properties and uses in geophysics[J].Geological Science and Technology Information,2008(3):107-110.
[8]肖昌漢,何華輝.磁性物體探測的線性求解方法[J].華中理工大學學報,1997(9):84-86.XIAO Changhan,HE Huahui.A linear method for detecting a magnetic object[J].Journal of Huazhong University of Science and Technology,1997(9):84-86.
[9]Nara T,Suzuki S,Ando S.A closed-form formula for magnetic dipole localization by measurement of its magnetic field and spatial gradients[J].Magnetics,IEEE Transactions on,2006,42(10):3 291-3 293.
[10]Schmidt P W.Inversion using Euler deconvolution of the magnetic gradient tensor[J].ASEG Extended Abstracts,2006(1):1-3.
[11]吳招才,劉天佑,高金耀.磁力梯度張量及在磁偶極子定位中的應用[C]//地球物理與海洋安全.北京:中國地球物理協會,2009.
[12]Bracken R E,Smith D V,Brown P J,et al.Calibrating a tensor magnetic gradiometer using spin data[M].US:US Geological Survey,2005.
[13]Sui Yangyi,Wang Shilong,Meng Hui,et al.An Analysis and Elimination of Zero Drift in Magnetic Gradient Tensor Exploration System[C]//Third International conference on Measuring Technology and Mechatronics Automation.Shanghai:ICMTMA,2011:371-374.
猜你喜歡
當代陜西(2022年6期)2022-04-19 12:11:54
娃娃樂園·綜合智能(2021年12期)2022-01-18 05:46:42
華人時刊(2020年13期)2020-09-25 08:21:42
中學生數理化(高中版.高二數學)(2020年1期)2020-02-20 13:22:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
中學生數理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2016年1期)2016-01-11 16:53:24
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12