模糊內模PID控制及應用
2012-12-01 10:08:16陸平趙捷郭鵬
自動化儀表 2012年3期
陸 平 趙 捷 郭 鵬
(南通大學電氣工程學院1,江蘇 南通 226019;中國農業大學水利與土木工程學院2,北京 100083)
0 引言
時滯現象在工業生產控制系統中普遍存在,這使得系統的控制變得非常困難[1]。多年來,不少學者對時滯系統的控制方法進行了研究,如模糊PID控制[2]、神經網絡控制[3]、預測控制[4]、Smith 預估控制[5]、內模控制[6]等。這些方法已經大部分應用到工業生產過程中,并取得了一定的經濟效益。對于被控對象含有非線性環節的情況,有人提出了在線辨識的方法[7],但目前的研究大多仍停留在仿真階段。針對非線性時滯系統,本文采用模糊內模PID控制方法進行控制,并將這種方法運用到JX-300X DCS溫度系統中。運行結果證明了該方法的可行性。
1 內模控制的基本原理
內模控制在結構上與Smith預估補償很相似,它有一個被稱為內模的過程模型,控制器的設計可由過程模型直接求取。
內模控制原理如圖1所示。
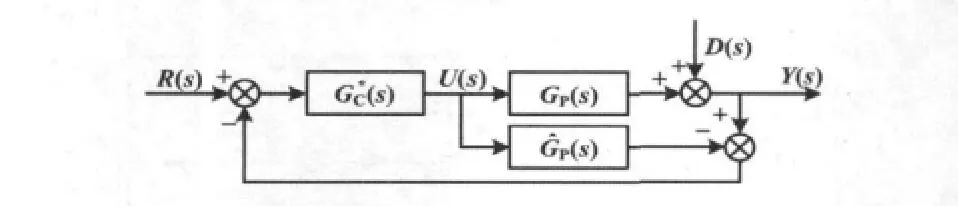
圖1 內模控制原理圖Fig.1 Schematic of internal model control
圖1中:GP(s)為被控對象;(s)為內模(s)為內模控制器;D(s)為外界擾動;R(s)為設定值。
1.1 理想的內模控制器

可見,當GP(s)可倒時(s)能克服外界擾動。
② 當R(s)≠0、D(s)=0時,Y(s)=R(s)。可見,(s)是Y(s)跟蹤R(s)的理想控制器。
1.2 實際的內模控制器
理想的內模控制器是在“模型沒有誤差且可倒”的情況下得到的。在實際工作中,模型與各種不同工況下的實際過程總會存在誤差,且(s)有時不可倒。因此,實際的內模控制器必須在理想控制器的基礎上加以改進。
實際內模控制器的設計可分為兩個步驟。
步驟1,將過程模型做因式分解:

步驟2,控制器設計:

這里的f是靜態增益為1的低通濾波器,其典型形式為:

式中:Tf為內模控制器的設計參數,Tf的大小決定了控制系統的響應速度;參數r為一正整數。
2 PID參數的整定
利用內模原理整定PID參數時,可從以下兩個方面入手:①將內模控制器轉化為反饋控制器的形式,再將反饋控制器轉化為選定的PID控制器;②整定濾波器常數Tf,使控制系統兼顧魯棒性和控制性能。
考慮到大部分工業控制對象可近似地用一階慣性環節來表示,假設其開環傳遞函數為:

基于內模原理的PID控制器為:

式中:KC、TI、TD分別為控制器的放大倍數、積分時間和微分時間。PID參數控制器的整定公式如下。
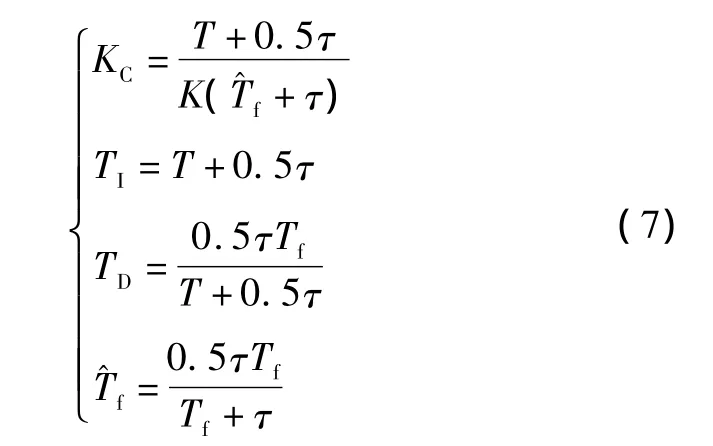
由式(7)可知,控制器的三個參數只與濾波器的時間常數Tf有關,因此,只需調整參數Tf。
3 溫度系統的建模
對于任何一個控制系統,如果能事先知道系統的模型,這對控制量的計算大有好處。在工業生產過程中,系統的參數往往不斷發生變化,要想實時跟蹤系統的參數,就必須采取在線辨識的方法[9]。在線辨識的方法很少能運用到工業生產系統中,這是因為在線辨識得到的參數往往偏離真實參數,甚至產生發散現象。如何在避免在線辨識不精確性的同時,根據系統運行的實際情況實時地調整系統參數是值得研究的內容。
既然在線辨識比較困難,則可考慮離線辨識。以電加熱爐為例,通過進一步分析可以發現,該系統的開環傳遞函數主要受液位高度、流量、溫度初始值及設定值、液體的種類等因素的影響。如果考慮以上各種因素,則需要離線辨識大量的系統參數,工作量將會很大。為了減少離線辨識的工作量,可以考慮影響系統參數的主要因素,在此以液位高度、溫度初始值及設定值為例,研究溫度系統的離線辨識。
離線辨識可采用以下方法進行。假設液位高度為H、溫度為t1時,用于控制加熱爐電壓的晶閘管開度為a%,將晶閘管開度增加到(a+Δa)%,則系統的溫度會上升,設穩定后的溫度為t2。根據開環響應曲線,通過作圖法即可確定這種情況下的系統模型。
下面研究系統參數的變化情況。首先研究液位高度對參數的影響,假設電加熱爐中液位的最高值為300 mm,可以將高度分為若干部分。若每60 mm為一段,則液位最高值可分為5段。在每一段內可將該段中點值作為建模的液位高度。假如液位在180~240 mm之間時,則以210 mm作為建模時的液位高度。對溫度也做類似的處理,若初始值為常溫20℃,設定值的最高值為100℃,則溫度可分為以下4段:20~40℃、40~60℃、60~80℃、80~100℃。在每段建模時,也以該段中間值作為建模時的實際值。
由上文的分析可知,如果考慮液位高度以及溫度初始值和設定值的影響,需要離線建立5×4=20個模型。可以推知,如果考慮更多的影響系統參數的因素,將需要離線建立更多的模型。事實上,在實際控制系統中,有些因素的變化范圍事先是已知的。當有擾動時,液位高度在180~220 mm之間波動、溫度在60~85℃之間波動。如果這些因素的變化范圍已知,就不需要建立那么多模型,而是根據實際情況,將每段的范圍減小,以提高每段參數的精度。當已知液位高度在180~220 mm變化時,為使建立的模型更加精確,可將其分為以下兩段:180~200 mm、200~220 mm。當然,作為一個功能較強的控制軟件,要能適應較寬范圍的參數變化,事先建立較多的系統模型還是十分必要的。
系統的傳遞函數可由式(5)來表示,需要辨識的參數為K、T、τ。利用離線辨識,得到一系列工況下系統的傳遞函數后,就可利用模糊內模PID進行控制。
4 模糊內模PID原理
已知每一種情況下的系統開環傳遞函數,由式(7)可求得控制器中的每一個變量。假設液位的高度為h,溫度為t,可借助基于T-S的模糊控制器來確定液位高度、溫度設定值與中的每一個變量之間的關系[10]。以KC為例,當h1<h<h2、t1<t<t2時,根據離線辨識得到的系統參數以及式(7)計算得到PID控制器的比例系數為K'C,則可得到如下的模糊規則:

同理,根據式(7)可得到液位的高度h、溫度t與TI、TD之間的關系。求得每一種情況下的KC、TI、TD后,可將它們代入式(6),得到這種情況下PID控制器的表達式。實際運行時,系統根據測得的溫度t以及液位高度h,實時地調用相應的PID控制器,對溫度系統進行控制。基于模糊內模PID控制的溫度系統的原理圖如圖2所示。
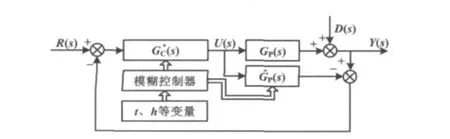
圖2 模糊內模PID溫度系統原理圖Fig.2 Schematic of temperature system based on fuzzy internal model PID
圖2中:t為鍋爐液體的溫度;h為液位的高度。
5 應用舉例
JX-300X是浙大中控生產的DCS系統,它可對液位、溫度、流量等進行研究。它的基本組成包括工程師站(ES)、操作站(OS)、控制站(CS)和通信網絡 SCnet II.。該系統非常接近于工業生產實際系統。在編程前,先對系統流程進行組態,并定義控制變量。
JX-300X系統提供了一套被稱為SCX語言的編程軟件,其中包含一些模塊指令,如一階滯后模塊、純滯后模塊、PID控制模塊和多路切換模塊等,這些模塊指令降低了編程的難度。如當參數已知時,只需調用PID模塊和一階滯后模塊,就能實現的功能。
通過觀察JX-300X DCS系統運行后的監控畫面可以發現,當溫度設定值和液位高度發生變化時,由于能夠及時調整系統開環傳遞函數并修正PID參數,電加熱爐的溫度能迅速地跟蹤設定溫度且幾乎沒有超調,取得了較好的控制效果。
6 結束語
在流程工業中,工業控制對象或多或少地存在時滯環節、非線性環節,常規控制方法很難滿足控制要求。內模PID控制能較好地克服時滯環節對系統控制的影響,但系統參數變化較大時,控制效果將會下降。在線辨識是研究得較多的系統參數辨識方法,但這種技術很少能夠應用到實際工程中。文章提出了離線辨識系統參數,采用模糊內模PID控制的方法,以適應系統參數的變化。將這種控制方法運用到DCS溫度系統中,取得了令人滿意的控制效果。
[1]王樹青.工業過程控制工程[M].北京:化學工業出版社,2007.
[2]張莉.混合模糊PID控制器在伺服控制系統中的應用[J].自動化儀表,2010,31(6):61 -63.
[3]謝光輝,喇凱英,王留運.液壓機械補償功率回收模型參考模糊神經網絡控制[J].機床與液壓,2009,37(2):114 -116.
[4]孫優賢.工業過程控制技術[M].北京:化學工業出版社,2006:48-107.
[5]夏晴,夏揚,鄭偉建.基于Smith預估的自抗擾控制系統[J].計算機仿真,2009,26(7):168 -171.
[6]尚繼良,王曉燕,于瑋.內模控制在鍋爐燃燒系統中的應用研究[J].微計算機信息,2007,23(12-1):41-42.
[7]李耀凱,王建,任永平.空調系統的溫度控制和在線辨識[J].裝備指揮技術學院學報,2011,22(1):104-106.
[8]黃巖.多變量內模-PID控制[D].北京:北京化工大學,2008.
[9]周遠平,孫亞萍.定子參數在線辨識技術的研究[J].微特電機,2010(8):18-21.
[10]趙宏偉,齊一名,臧雪柏,等.基于系統辨識與T-S模糊神經網絡的磨礦分級控制[J].吉林大學學報:工學版,2011,41(1):171 -175.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
測控技術(2018年9期)2018-11-25 07:45:00
石油化工自動化(2018年5期)2018-11-14 02:34:30
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19