一種便攜式船舶氣象儀仿真儀
2012-12-01 10:08:00漆隨平王東明郭顏萍于宏波張志偉
自動化儀表 2012年1期
漆隨平 王東明 郭顏萍 于宏波 張志偉
(山東省海洋環境監測技術重點實驗室1,山東 青島 266001;山東省科學院海洋儀器儀表研究所2,山東 青島 266001)
0 引言
船舶氣象儀(以下簡稱氣象儀)用來為船舶提供氣象信息,是船舶的重要設備[1]。當氣象儀出現故障時,要求其能夠快速恢復正常工作,以保證船舶的航行安全。雖然目前各型號的氣象儀均采用了模塊化設計[2-4],并設計了故障診斷程序[5],在其出現故障時僅需更換模塊,但在維修時需要首先判斷故障類別及位置。對于難以排除的故障,則需要維修專家上船或隨船維修,這在航行或執行任務時難以實現。因此,氣象儀的維修維護成為一個亟待解決的問題。
針對上述問題,本文研制了便攜式船舶氣象儀仿真儀(以下簡稱仿真儀),實現了氣象儀的綜合仿真和故障診斷。樣機的使用試驗結果表明,該氣象儀提高了測試維修的工作效率,縮短了氣象儀的維修時間,增強了氣象儀的使用效率,對船舶的航行安全及其推廣應用將起到十分重要的作用。
1 硬件電路設計
1.1 總體結構
便攜式故障診斷儀已在機械儀表設備維修性研究領域得到廣泛應用[6]。為實現便攜的功能,本仿真儀設計為模塊化結構,用戶可以根據需要選擇功能模塊,各功能模塊可即插即用。仿真儀設計有可充電鋰電池,用來滿足應急及便攜式使用的需要。
仿真儀由主儀器、兩個檢測模塊和一個接口轉換模塊組成。兩個檢測模塊分別是檢測主機模塊和檢測傳感器模塊。主儀器模塊用來完成檢測任務、人機交互和檢測結果顯示等功能。檢測主機模塊用于仿真傳感器,根據主儀器給定的氣象儀型號和傳感器型號仿真輸出相應的傳感器信號,實現對氣象儀主機的檢測和故障診斷,并將檢測和診斷結果返回給主儀器,實現結果顯示。檢測傳感器模塊用于仿真氣象儀主機,可根據主儀器給定的傳感器接口類型、信號形式采集傳感器信號,實現對傳感器的檢測和故障診斷,并將檢測和診斷結果返回給主儀器模塊,實現結果顯示。接口轉換模塊實現各種類型的傳感器及接插件的接口轉換。
AVR單片機采用 CMOS技術和 RISC架構,使AVR單片機具有高速、低功耗和高可靠性的特點[7]。AVR系列單片機中的AT90CAN128內部集成了CAN控制器,它能夠方便地實現CAN總線接口[8]。為完成仿真儀故障診斷模型,實現其智能化診斷功能,仿真儀主儀器及兩個檢測模塊都采用AT90CAN128核心處理器構建為嵌入式系統。主儀器和檢測模塊通過CAN總線進行通信。
1.2 主儀器
仿真儀主儀器是仿真儀的控制核心,提供人機交互界面和操作按鍵,響應用戶的操作命令并顯示檢測信息。仿真儀主儀器由AVR單片機系統、人機交互單元、顯示驅動電路、按鍵處理電路、數據存儲單元、時鐘處理電路、CAN總線收發器、復位/電源管理電路及JTAG電路組成。人機交互單元包括顯示屏和按鍵。顯示屏采用EW50855BMW型液晶屏,按鍵選用金屬鍵盤,由上移、下移、左移、右移、確認、返回、菜單、翻頁八個鍵組成,并采用2×4矩陣式接口。數據存儲單元設計有2 GB的SD卡,以存儲專家知識庫數據及檢測歷史數據。通信單元由CAN控制器(AT90CAN128內置)、CAN收發器和CAN總線接口電路組成。該CAN控制器支持 CAN2.0A&2.0B規范,通信速率最高達1 Mbit/s,CAN收發器選擇帶隔離的高速收發器CTM1050,符合 ISO11898 標準[8],具有 DC 2500 V 的隔離功能及ESD保護作用。時鐘處理電路、復位/電源管理電路及JTAG電路為嵌入式系統通同的標準電路。仿真儀的主儀器電路框圖如圖1所示。

圖1 主儀器電路圖Fig.1 Block diagram of the circuit in main unit
1.3 檢測主機模塊
檢測主機模塊能夠按照仿真儀主儀器發來的指令和選擇的傳感器輸出信號量程,仿真輸出低、中、高三檔傳感器信號。檢測主機模塊硬件由AVR單片機系統及其相應的傳感器信號仿真電路、通信仿真電路組成。AVR單片機系統采用AT90CAN128微處理器。根據氣象儀傳感器現狀,仿真傳感器信號單元能夠仿真輸出的傳感器信號包括脈沖信號、8位開關量信號、4~20 mA電流信號、Pt100鉑電阻信號、0~5 V電壓信號和RS-485數據。這些信號分別用來實現風速、風向、溫度、濕度、氣壓、降水量和能見度等信號的仿真。通信單元包括RS-232接口電路、RS-422接口電路和CAN總線接口電路。該通信單元用以單片機系統調試、仿真接收航速航向數據以及與仿真儀主儀器通信。此外,檢測主機模塊通過采用不同的接插件,能夠直接連接到主機內部的I/O板、A/D轉換板、數據采集板、通信板、顯控模塊和功能模塊等電路,對電路進行仿真檢測。檢測主機模塊電路原理如圖2所示。
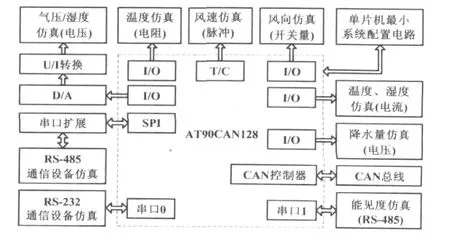
圖2 模塊電路原理圖Fig.2 Principle of the module circuitry
1.4 檢測傳感器模塊
檢測傳感器模塊能夠按照仿真儀主儀器發來的指令,仿真氣象儀采集風、溫濕度、氣壓、能見度及降水量等傳感器的信號,并把計算處理后的結果回傳給仿真儀主儀器。檢測傳感器模塊由AVR單片機系統、傳感器信號處理單元和CAN總線接口電路組成,其硬件原理框圖與檢測主儀器模塊類似。AVR單片機系統采用AT90CAN128微處理器。傳感器信號處理單元包括風速、風向、溫度、濕度、氣壓、降水量和能見度等信號調理電路,分別輸出與相應的傳感器信號范圍一致的脈沖、8位并行開關量、4~20 mA電流、Pt100鉑電阻、0~2 V和0~5 V電壓、RS-232串口數據以及RS-485串口數據等信號。
脈沖信號經過濾波整形后,送入AVR單片機的定時器/計數器進行計數;開關量信號經過施密特整形后與AVR單片機的I/O口相連;電流信號通過100 Ω的精密電阻轉換為電壓信號并經調理后,送至A/D轉換器進行A/D轉換;Pt100鉑電阻信號經惠斯通電橋轉換為電壓信號,再經過放大電路和調理電路處理后送A/D轉換器進行A/D轉換;電壓信號經調理電路處理后送A/D轉換器進行A/D轉換;串口數據由電平轉換芯片進行電平轉換后,再經過串口擴展電路處理后送AT90CAN128的串口。
1.5 電源模塊電路設計
為了實現仿真儀便攜基站的功能,其電源采用交流220 V和鋰電池這兩種方式。設計的電源模塊由鋰電池單元和電壓調整單元組成。鋰電池單元通過充電器連接線接通交流電源(220 V/50Hz)后,即可為仿真儀供電。鋰電池充滿電后,可保證仿真儀連續工作3 h;電壓調整單元可將交流220 V電源調制成直流15 V、±5 V,以供仿真儀工作。
2 軟件設計
仿真儀主儀器的工作方式設計為檢測傳感器、檢測主機和系統自檢三種模式。開機后,顯示屏顯示主菜單界面。通過操作按鍵,用戶可選擇其中的一種工作模式。仿真儀主儀器和各檢測模塊之間的通信采用CAN總線通信。CAN通信程序采用主動發送和中斷接收的方式,CAN通信協議遵循CAN2.0B規范。
仿真儀主儀器是仿真儀的信息處理和控制的核心,用以提供人機交互界面和操作按鍵,響應用戶的操作命令,并向仿真儀檢測模塊發送檢測命令和顯示檢測信息。仿真儀主儀器主程序流程框圖如圖3所示。
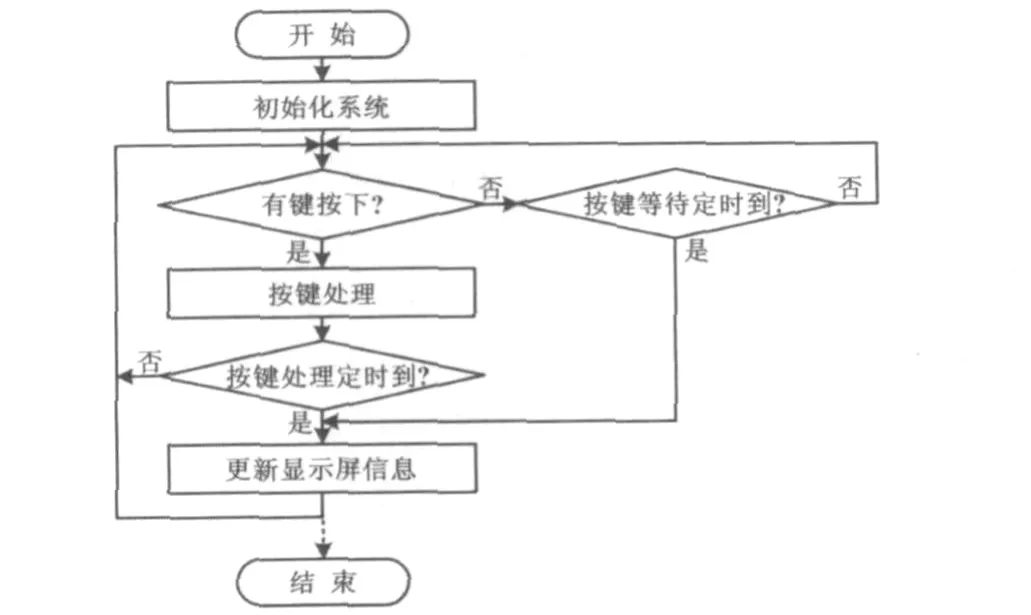
圖3 主程序流程框圖Fig.3 Flowchart of the main program
檢測主機模塊用來接收仿真儀主儀器指令輸出傳感器信號,代替實際傳感器與氣象儀主機連接,并對主機傳感器接口及其內部通道、主機內部各個相關模塊進行檢測。
檢測傳感器模塊用來接收仿真儀主儀器指令后采集傳感器信號,并對信號進行計算處理,最后將數據返回給仿真儀主儀器。
3 關鍵技術及實現
氣象儀工作原理及組成結構復雜,其內部電路板卡和外部傳感器種類繁多,各自的電路組成復雜,元器件數量大,導致氣象儀可能出現的故障種類多、故障點定位困難。因此,如何準確快速識別并定位故障點是仿真儀的關鍵技術。對此,本文將氣象儀研制、生產和維修等方面的專家經驗建立成知識庫,采用故障樹分析(fault tree analysis,FTA)方法實現故障的識別和定位,并設計出相應的基于嵌入式系統的專家系統軟件。
將系統故障的各種原因由總體至部分按照樹枝狀結構,自上而下逐層細化的分析方法稱為故障樹分析方法。故障樹體現了一個系統內故障或其他事件之間的交互關系[9]。在故障樹中,底事件(basic event)通過一些邏輯符號(與門和或門)連接到一個或多個頂事件(top event)。頂事件一般指危及系統安全的事件或是不希望發生的系統故障,底事件通常表示部件故障或者是人員的錯誤操作。通過分析氣象儀,建立用Mj表示中間事件(j=1,…,9)、xi表示底事件(j=1,…,20)、Top為頂事件的系統故障樹模型。專家系統的智能化主要表現為能夠在特定的領域內模仿專家思維來求解復雜問題。專家系統包含某領域專家的大量知識,擁有類似專家思維的推理能力,并能使用這些知識來解決實際問題[10-11]。氣象儀故障樹如圖4所示。

圖4 氣象儀故障樹Fig.4 Fault tree of the meteorological instrument
4 結束語
為了解決船舶氣象儀維修時存在的困難,提出了一種便攜式船舶氣象儀故障診斷和維修的通用模式。該仿真儀綜合了現代信號檢測與信號處理技術、嵌入式系統技術和控制網絡通信技術,并結合故障樹分析方法,實現了對氣象儀主機及其板卡、傳感器、連接線及其連接件的快速檢測,并使氣象儀故障診斷實現在線化,具有良好的開放性和可擴展性。因此,該仿真儀的成功研制為氣象儀的故障診斷和快速維修提供了便捷工具。同時,該仿真儀還可用于氣象儀的使用培訓教學,提高了氣象儀的維修保障能力。
[1]楊慧,王東明.XZC2-2G型船舶氣象儀[J].海洋儀器裝備,2002(1):36-37.
[2]王文濤,姜錦英.船舶氣象儀[J].海洋技術,2001,20(2):38 -40.
[3]梁峰,王平,漆隨平.艦用船舶氣象儀[J].機械,2008,35(6):29 -31.
[4]于宏波,宋文杰,郭顏萍,等.現場總線技術在船舶氣象儀系統中的應用[J].山東科學,2005,18(5):67 -69.
[5]漆隨平,于慧彬,劉濤,等.基于徑向基概率神經網絡的氣象參數狀態識別[J].自動化儀表,2008,29(8):5 -7.
[6]周敬泉,袁鵬.便攜式智能測量與故障診斷儀的設計與實現[J].自動化儀表,2000,21(10):17 -18.
[7]馬潮.AVR單片機嵌入式系統原理與應用實踐[M].北京:北京航空航天大學出版社,2007.
[8]ATMEL Corporation.AT90CAN128:8-bit Microcontroller with 128K Bytes of ISP Flash and CAN Controller[EB/OL].[2010 - 12 -09]http://www.atmel.com.
[9]史定華.故障樹分析技術方法和理論[M].北京:北京師范大學出版社,1993.
[10]吳今培,肖健華.智能故障診斷與專家系統[M].北京:科學出版社,1997.
[11]張佳,曾國宏,許晶菁.混合型有源電力濾波器結構和控制算法的研究與實現[J].電力電容器,2007,28(3):29 -32.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年11期)2018-08-04 03:25:42
汽車維護與修理(2016年10期)2016-07-10 08:17:41
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
汽車維修與保養(2015年6期)2015-04-17 03:31:50
