GPS/INS深組合技術探討
2012-12-02 06:15:42馮海艷劉正興
教練機 2012年1期
關鍵詞:信號
董 斌,馮海艷,劉正興
(洪都航空工業集團, 江西 南昌330024)
0 引言
導航技術是一項涉及多學科交叉的應用技術,在軍用領域和民用領域均有著廣泛的應用前景。 隨著現代戰爭的發展, 面對未來高速和超高速武器的需求和戰場復雜的電磁環境, 導航系統需要能穩定的應對更高的載體動態環境和無處不在電子干擾環境。 縱觀近來的幾場局部戰爭,現代戰場精確制導武器精確打擊的前提條件是導航系統需能在高速和復雜電磁環境下穩定可靠工作并提供精確的位置和速度信息,因此,對導航系統在高動態和日益復雜電磁環境下的可靠性和可用性提出了更高要求。
1 GPS/INS 組合導航技術介紹
慣性導航系統 (INS—Inertial Navigation System)INS 和GPS(GPS—Global Positioning System)[1]有著各自的特點與優點, 同時也具有各自的缺陷和不足。INS 是不依賴于外部電磁信號,也不發射電磁信號的全自主式導航系統,隱蔽性好,具有良好的抗干擾性能,完全獨立自主地提供位置、速度、姿態等多種較高精度導航參數,然而,它的系統精度主要取決于慣性測量器件,導航參數的誤差隨時間不斷積累,無法滿足高精度要求;GPS 是以衛星為基礎的全球無線電導航定位系統,能夠為用戶提供全天候、全時間、連續的精確的三維位置、速度、時間信息,但是,當GPS的載體在高動態和復雜電磁環境下時, 常使GPS 接收機不易捕獲和跟蹤衛星載波信號, 甚至產生失鎖現象。 此外, 由于GPS 接收機輸出數據率相對比較低,因此,單一GPS 系統不能滿足武器系統對導航信息的要求。為了實現GPS 和INS 優缺點高度互補,人們提出將GPS 和INS 系統進行組合, 利用信息融合技術對組合系統的數據進行處理, 使之能充分發揮二者的優點,提高整個導航系統的性能。 組合導航系統自提出以來,經歷了三個階段的發展,按組合導航技術發展先后順序和組合導航系統信息交換的程度依次為松性組合、緊性組合和超緊組合,其中超緊組合又稱為深性組合(簡稱深組合)[2]。 松性組合,核心思想就是利用GPS 和INS 導航輸出的位置、 速度的誤差進行建模并進行數據融合濾波,估計其誤差量,用其對INS 導航輸出的位置和速度進行誤差修正,提高導航精度。松性組合在一定程度上提高了組合系統的性能, 但是松性組合數據融合采用導航輸出值,其數值之間存在一定的相關性,而一般的數據融合采用的Kalman 濾波建模均為輸入數據不相關, 因此存在一定模型誤差。 為了克服松性組合的這個弱點,人們進一步采用偽距、偽距率等原始采樣值進行數據融合并估計出INS 的誤差參數和導航誤差,對INS 的誤差參數進行修正,并進一步修正其導航輸出值,這就是緊性組合,也稱緊組合。 由于緊性組合中偽距、偽距率數據原始采樣值,數值之間互不相關,因此性能較松性組合有所提高,同時提高了衛星的利用率。
松性組合、 緊性組合這兩種組合導航系統均采用GPS 輔助INS 的方式, 提高了INS 導航輸出的精度,而GPS 并沒有獲得任何輔助,因此雖然整個系統的性能有所提高, 但是GPS 接收機的性能并沒有得到改善。 若GPS 接收機在高動態或者低信噪比等惡劣環境中會出現不能有效跟蹤衛星信號的情況,組合導航系統又回到INS 純慣性導航, 因此這兩種組合方式并不能從根本上提高整個系統的可用性和可靠性。 針對上文所述松性組合和緊性組合的共同弱點,人們提出了采用INS 數據對GPS 進行輔助,這就是深組合。 深組合技術在原先GPS 接收機輔助INS的基礎上, 提出利用INS 數據對GPS 接收機進行輔助, 即一方面利用GPS 和INS 的導航數據進行組合濾波,對INS 的各種誤差量進行輔助修正,減小其導航誤差; 另一方面,INS 利用自身測得的載體位置和速度信息對GPS 載波跟蹤環路進行輔助, 從外部剔除接收到的衛星信號中由于載體和衛星之間相對運動所引起的動態, 使得GPS 接收機在高動態環境下可穩定工作, 并可進一步壓縮接收機載波跟蹤環路帶寬,抑制噪聲,提高系統的抗干擾性能。 鑒于深組合系統具有如此優越的性能,GPS/INS 深組合技術已成為下一代高速精確制導武器的核心技術之一,并成為國內外各大機構和院校研究的新熱點。
2 GPS/INS 深組合技術原理與實現
2.1 GPS/INS 深組合技術原理
GPS 接收機按其內部工作流程的順序,通常分為射頻前端處理、 基帶數字信號處理和定位導航運算三大功能模塊。 射頻前端處理模塊通過天線接收所有可見GPS 衛星的信號, 經前置濾波器和放大器的濾波放大后, 再與本機振蕩器產生的正弦本振信號進行混頻下變頻為中頻信號, 經模數轉換器轉變成離散的數字中頻信號; 中頻信號進入基帶數字信號處理模塊,完成對衛星信號的捕獲、跟蹤、位同步、幀同步等信號的處理, 并將處理后GPS 數據和導航電文送給定位導航運算模塊進行導航參數的處理。 深組合技術與傳統的組合導航方式相比, 增加了慣導數據對GPS 衛星接收機的輔助, 而由于載波環是GPS 接收機跟蹤環路最脆弱的環節,一般只要載波環不失鎖,則碼環不會失鎖,因此INS 提供的信息只對載波環進行輔助,通過載波環對碼環進行輔助。 其原理圖見圖1。 在GPS/INS 深組合系統中,接收機進行載波跟蹤的同時, 接收機還將利用INS 測得的載體動態信息和由衛星星歷計算出來的衛星動態信息計算出衛星信號中由于兩者相對運動所引起的多普勒頻率,并從外部對接收機載波環進行輔助,如果外部多普勒頻率估算完全準確, 則接收到的信號中由于載體與衛星之間相對運動所引起的多普勒頻率動態將會消除, 此時載波跟蹤環所需要跟蹤的動態就只有接收機本地晶振的頻率動態和熱噪聲, 這個動態通常很小,因此接收機能在高動態環境下穩定工作。此外, 由于需要接收機載波跟蹤環路跟蹤的動態很小,還可進一步壓縮載波跟蹤環路帶寬,抑制噪聲,延長預檢測積分時間,增強信號強度和信噪比,提高接收機抗干擾性能。 因此深組合技術能使GPS 接收機在高動態和低信噪比同時存在的環境下穩定工作,輸出精確的導航定位信息。
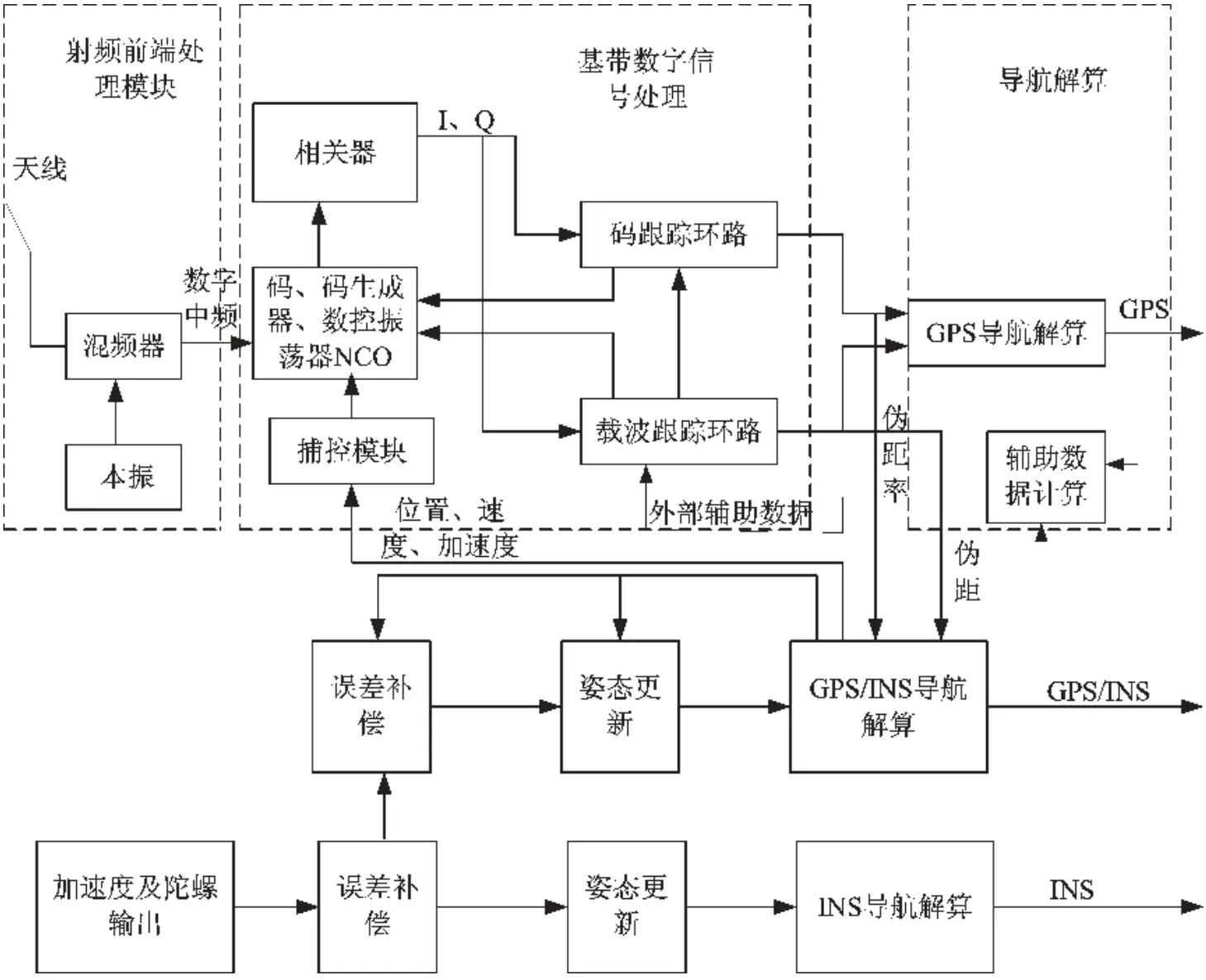
圖1 GPS/INS 深組合技術原理圖
2.2 GPS/INS 深組合技術工程實現
圖2 為工程上深組合技術中GPS 跟蹤環路的具體實現原理圖, 圖2 中外部多普勒頻率輔助信息是根據外部INS 提供的載體動態信息進行估算的,當開關K 打到2 時, 外部頻率輔助將會通過前饋的方式注入環路中對載波跟蹤進行輔助, 能剔除信號中的絕大多數動態,使接收機在高動態下能穩定工作。在實際GPS/INS 深組合系統中, 由于INS 只能提供載體的動態信息,為計算外部輔助多普勒頻率,還需要衛星的動態信息, 因此在進行外部頻率輔助之前GPS 需能接收衛星星歷,即在進行外部頻率輔助之前接收機需能獨立工作,捕獲并跟蹤GPS 信號,接收導航電文,解調衛星星歷,計算出衛星動態信息,若此時接收到有效的INS 輔助數據, 則在外部計算出多普勒頻率并將其注入載波跟蹤環進行環路輔助。 由于輔助前后接收機載波跟蹤環所需跟蹤的動態大不相同,因此所需的環路帶寬也不一樣。 輔助之前,信號中的動態完全由載波跟蹤環路跟蹤, 所需環路帶寬較寬;輔助之后,由于信號中的動態被外部輔助有效剔除,此時跟蹤環路需要跟蹤的動態將大為減小,環路帶寬可大為壓縮,一方面可抑制噪聲,提高測量精度, 另一方面還可為弱信號跟蹤技術中積分時間延長提供條件, 因此深組合系統中由傳統跟蹤模式到輔助環路跟蹤模式之間存在環路切換過程。如圖2中所示,在未進行輔助時,開關K 指向1,GPS 接收機載波跟蹤環將通過環路濾波器1 這一通道進行環路濾波,該通道中的濾波器環路帶寬較寬,能有效應對高動態應力, 使接收機不受輔助也能穩定跟蹤GPS信號。 在接收機接收到衛星星歷并計算出衛星動態信息后, 利用INS 提供的載體位置、 速度等動態信息,從外部估算出多普勒頻率并將其注入環路中,此時信號中的動態將基本被消除, 載波跟蹤環路所需要跟蹤的動態大為減小, 此時可以壓縮環路帶寬,因此可將開關K 將打到通道2 上。 由于通道2 中的環路濾波器2 的帶寬比環路濾波器1 小很多,可以有效抑制噪聲和干擾,提高接收機的測量精度。
3 深組合技術理論分析
GPS/INS 深組合技術核心思想在于利用INS 測得的載體動態和由衛星星歷計算出的衛星動態,估算出由于載體與衛星之間相對運動所引起的多普勒頻移,對GPS 載波跟蹤環路進行外部輔助,剔除信號中的多普勒頻率動態。 由于載波相位的導數即為多普勒頻率,若外部估算的多普勒頻率完全準確,則將與其值相同, 由此結合實際情況, 經過添加相關誤差, 我們給出了INS 輔助GPS 載波跟蹤環路的域數學模型[3],如圖3 所示。
圖3 中φr(s)、φo(s)與δφ(s)分別表示鎖相環的輸入相位、輸出相位與相位誤差,fexl(s)是外部頻率輔助,δfext(s)與wn(s)分別表示外部輔助頻率誤差與熱噪聲誤差,F(s)代表環路濾波函數,kp 是鑒相增益,p是整個環路的增益,k=2πkpknco,kNCO=2πknco是數控振蕩器NCO 增益,knco=fx/2N,其中N 是NCO 的計數器位數,fs是采樣頻率,α 是INS 輔助數據的帶寬,一般較大,e-sτ為輔助時間延遲模型,τ 則是外部輔助信息采樣時刻相對于輔助時刻的時間延遲,其值τ>0。
為了更清晰的認識GPS/INS 深組合技術的優勢,理論分析先不考慮各種誤差,可認為:τ=0,δfext(s)=0,wn(s)=0,由此并根據深組合數學模型可以推導出:
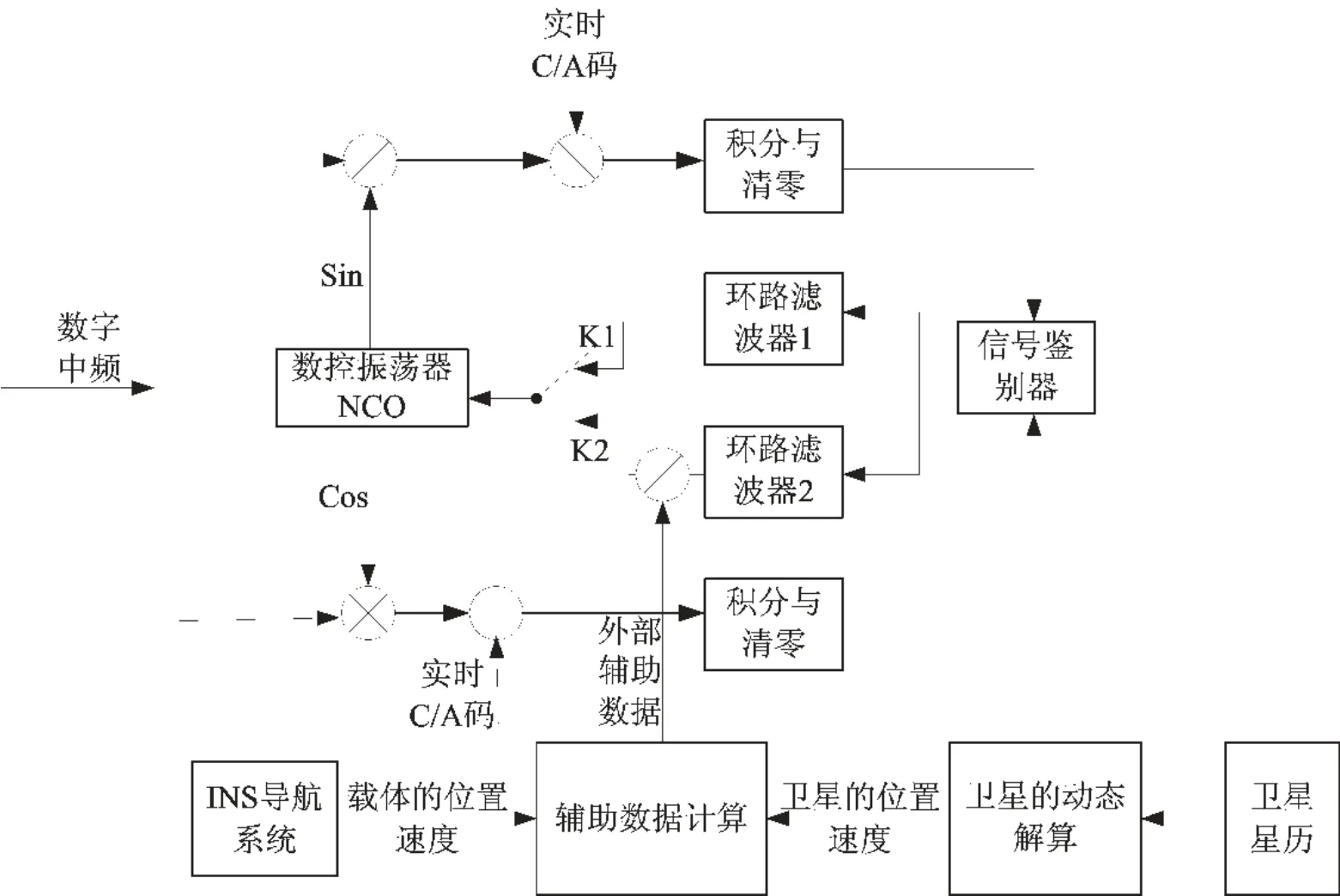
圖2 GPS/INS 深組合載波跟蹤環路輔助原理圖
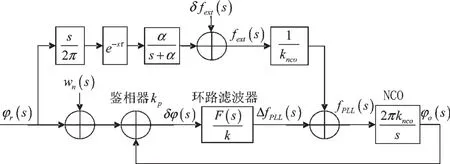
圖3 GPS/INS 深組合技術數學模型

即:

從式(1)、(2)可以看出,在INS 輔助GPS 載波跟蹤環深組合系統中,若輔助數據完全準確,則鎖相環的輸出信號相位將準確體現輸入信號相位, 不存在任何相位誤差,實現信號相位的完美跟蹤。 這種特點能使得鎖相環在任何動態環境下都能保持載波跟蹤環路相位鎖定, 使GPS 接收機對衛星信號的跟蹤變得更加穩定可靠, 大大提高了接收機的可用性和可靠性,這也是GPS/INS 深組合技術的核心思想,即無論載體經歷多高的動態, 接收機都能穩定跟蹤上衛星信號中的相位變化,使接收機保持穩定工作。
4 深組合技術組合導航系統的性能驗證
深組合技術理論分析時, 沒有考慮各種誤差的影響,但是在實際的GPS/INS 深組合系統中,必然存在很多誤差,比如外部輔助數據時間延遲、輔助信息可能存在誤差等, 這些誤差對GPS 跟蹤環路相位誤差均有一定的影響。 為了分析實際工程中深組合對導航系統帶來的優點,進行了實物的性能測量。
4.1 深組合技術抗干擾性能仿真試驗
采用具備深組合功能的抗干擾衛星導航接收裝置在試驗室仿真環境下進行測試。 運用在接收機接收衛星信號通路上耦合干擾信號的方法分別在靜態和動態模式下測試了接收機的抗干擾性能,通過不斷增加干擾信號功率, 直到接收機不能接收衛星信號,并通過軟件控制對比在有無深組合情況下接收機能加到的最大干擾功率,得出深組合的抗干擾能力。
試驗結果表明, 在靜態和動態模式下采用深組合技術能使衛星導航接收裝置的抗干擾性能明顯提高。
4.2 深組合技術組合導航精度測試
深組合技術對INS 帶來的影響主要涉及到不少于4 顆衛星的組合精度和少于4 顆衛星的組合精度。 搭建深組合系統仿真平臺, 對設計的深組合系統進行了組合算法測試, 測試結果如圖4 所示。 在不少于4 顆衛星情況下, 組合精度位置誤差在10 m以內,速度誤差在0.1 m/s 以內;在3 顆可用衛星情況下,位置誤差在50 m 以內,速度誤差為0.2 m/s。
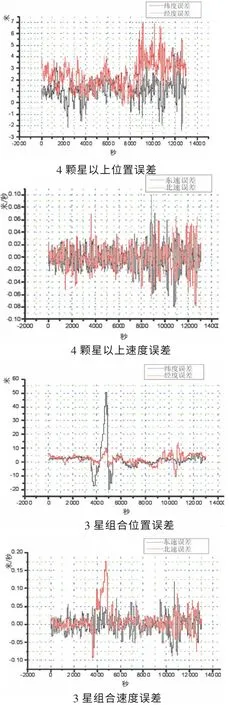
圖4 深組合系統組合算法測試結果
動態情況下的測試, 是考核深組合性能手段,由于采用大量的飛行測試成本很高而且也不現實,因此一般采取地面跑車試驗。
5 結語
本文以GPS/INS 重點介紹了深組合技術的原理和工程實現, 同時進行了理論分析, 并經過實物仿真驗證,測試結果顯示,在靜態和動態模式下采用深組合技術能使衛星導航接收裝置的抗干擾性能明顯提高,在不少于4 顆衛星的情況下,組合精度位置誤差在10 m以內, 速度誤差在0.1 m/s 以內; 在3 顆可用衛星情況下,位置誤差在50 m 以內,速度誤差為0.2 m/s。
[1]張天光等譯, 捷聯慣性導航系統 (第二版),北京:國防工業出版社,2007.
[2]Elliott D.Kaplan 著, 寇艷紅譯,GPS 原理與應用(第二版),北京:電子工業出版社,2007.
[3]Ronald E. Best. Phase-Locked Loops: Design,Simulation,and Applications,Sixth Edition.The McGraw-Hill Companies,2004.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
