反艦導彈導引頭試驗數據采集系統設計
2012-12-03 02:54:06薄志峰
制導與引信 2012年3期
馬 艷, 薄志峰
(中國人民解放軍92941部隊92分隊,遼寧 葫蘆島125001)
0 引言
未來戰爭對于武器裝備的作戰要求向著“快速、精確、高效”的方向發展,而導引頭對于反艦導彈的命中精度、突防能力、抗干擾能力等都起著至關重要的作用,因此對導引頭性能指標的檢驗是導彈試驗與鑒定過程中一項非常重要的內容。導引頭需要檢驗的指標主要包括導引頭作用距離、捕捉可靠性、跟蹤穩定性、環境適應能力以及抗干擾性能等,要想全面檢驗導引頭的性能僅靠幾次導彈飛行試驗是遠遠不夠的,而且完全靠導彈飛行試驗來檢驗也是很不經濟的。這是一個多目標的試驗設計問題。
本文針對反艦導彈導引頭試驗與鑒定,采用運籌學中的動態規劃法進行試驗階段總體設計,提出最優路徑,在不同階段研究試驗數據采集分析方法,設計數據采集設備,獲取典型試驗數據信息,分段對導引頭的性能進行分析與評估,為下一階段試驗提供子樣和依據,為最終試驗結果的分析評定奠定基礎。
1 動態規劃法基本思想
運籌學主要研究解決實際問題時的系統優化思想,從提出問題、分析建模、求解到方案實施整個過程具有一整套嚴密的科學方法。按照所解決問題性質的差別,可分為線性規劃、非線性規劃、動態規劃、圖論與網絡分析、存貯論、排隊論、對策論等分支。其中,動態規劃是研究多階段決策過程最優化的運籌學分支,適合解決大型復雜試驗的設計問題。
動態規劃法研究多階段決策過程的總體優化,目標是達到整個活動過程的總體效果最優。將整個活動按時間順序分解成若干相互聯系的階段,每個階段依次進行決策,上一階段的輸出狀態是下一階段的輸入狀態,本段決策的執行將影響到下一段的決策。因此,從系統總體出發,使由各階段序列構成的目標函數值達到最優。
動態規劃法的基本思想如下[1]:
a)將多階段決策過程劃分階段,恰當地選取狀態變量、決策變量及定義最優指標函數,從而把問題化成一族同類型的子問題,然后逐個求解;
b)求解時從邊界條件開始,逆(或順)過程行進方向,逐段遞推尋優,在每一個子問題求解時,都要使用它前面已求出的子問題的最優結果,最后一個子問題的最優解,就是整個問題的最優解;
c)動態規劃法是既把當前一段與未來各段分開,又把當前效益和未來效益結合起來考慮的一種最優方法,因此每段的最優決策選取是從全局考慮的。
2 導引頭試驗階段設計
試驗設計在充分考慮考核被試品性能指標評定要求的前提下,還要考慮試驗經費、試驗設施、試驗裝備等實際條件,設法以較少的投資獲取最大數量的有用試驗數據,做到資源高度共享,信息高效融合。
針對導引頭的多項性能指標考核,遵循動態規劃法的思想,可以按時間特征將整個導引頭試驗過程劃分為實驗室靜態試驗、導引頭對海試驗、導引頭海上掛飛試驗三個階段,在不同階段獲取典型試驗數據信息。
(1)實驗室靜態試驗
在實驗室環境下,可以利用目標模擬器等設備模擬測試導引頭的各項性能指標,如檢驗導引頭接收機靈敏度、目標記憶能力、主被動導引頭數據融合能力等。還可以對導引頭加載各種干擾,如欺騙干擾、壓制干擾、噪聲干擾等,采集并記錄導引頭在各種干擾環境下的工作狀態,分析導引頭的抗干擾能力。
(2)導引頭對海試驗
將導引頭架設在海邊,在海背景條件下選擇適當航路,利用真實目標(艦艇或者模擬靶船)的運動來檢驗導引頭的各項性能指標,如導引頭作用距離、目標選擇性、捕捉可靠性、跟蹤穩定性、跟蹤精度、環境適應能力以及抗干擾性能等。
(3)導引頭海上掛飛試驗
在接近實戰環境條件下,利用機載飛行試驗的可重復性,動態檢驗導引頭的功能及性能指標,以及導引頭對海雜波的抑制能力和導引頭的突防能力,為后續導彈飛行試驗奠定基礎。
考慮到試驗經費等實際條件,接下來要研究在總試驗投資一定的前提下,每個試驗階段尤其是第二、三階段的組織實施方案,合理控制試驗次數,統籌安排試驗項目,以達到最優決策的目的,為最終試驗結果的分析評定奠定基礎。
分析每個階段的試驗目的,結合導引頭動態飛行試驗模式,有些試驗項目可以結合進行,一個試驗項目可以安排多個性能指標的考核,合理優化試驗方案,有效縮短試驗周期。導引頭試驗項目可以大致合并為以下五類:
a)項目一:作用威力、連續跟蹤;
b)項目二:搜索掃描、目標識別、穩定跟蹤;
c)項目三:末段跟蹤、角閃爍;
d)項目四:環境適應能力;
e)項目五:抗干擾能力。
實驗室靜態試驗階段可以安排項目一、二、三、五,試驗組織和實施方便,可以多次重復進行;對海試驗階段可以安排項目一、二、四、五試驗,但試驗組織和實施較困難,試驗消耗較大,試驗次數要適當;海上掛飛試驗階段可以在接近實戰環境條件下,安排所有項目試驗,但相對來說試驗組織和實施最困難,試驗消耗最大,試驗次數要盡可能減少。
表1為三個階段不同試驗項目參數選取表,表2為各個試驗項目預期效益計算表(列舉數據僅供參考)。其中,試驗實施方便性與組織一次實驗的試驗投資mi成反比,獲取數據有效性是對于導引頭最終試驗結果的評定而言的,Xi為每個階段試驗次數。
在總試驗投資m一定的前提下,將其投資于三個試驗階段mi(i=1,2,3),每個試驗項目的預期效益分別為gj(j=1,2,3,4,5),以獲取最大效益,由此求出每個階段的試驗次數Xi(i=1,2,3)。當然對于實驗室靜態試驗中,不同試驗項目X1可以為不同值,在此統一記為X1只是為了表達直觀。建立動態規劃模型如下:
求X1,X2,X3,使 max gj=g1jX1+g2jX2+g3jX3,且滿足約束:
應用動態規劃方法救解,按逆推的方法,首先考慮第三階段投資,再考慮第二、第一階段投資。于是有:階段k,本例中取1,2,3。

表1 三個階段不同試驗項目參數選取表(示例)
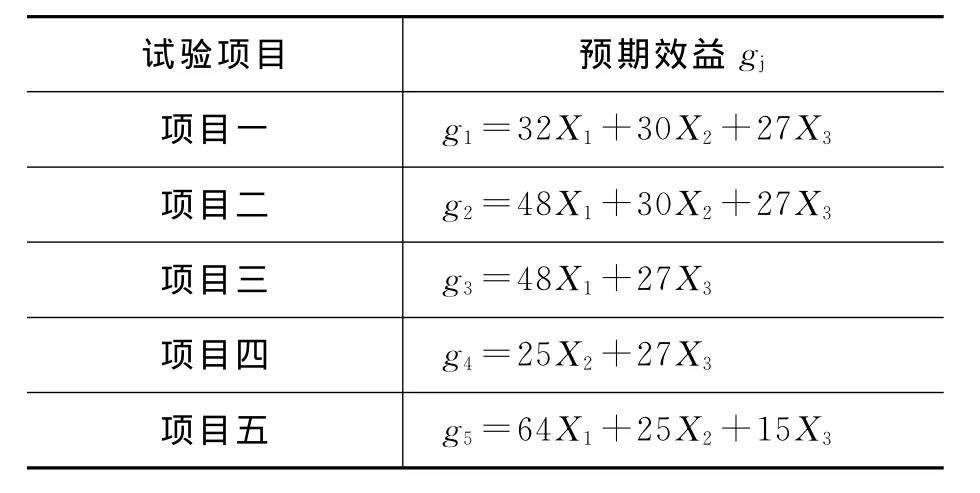
表2 預期效益計算表(示例)
狀態變量Sk:第k階段可以投資于第k至第3階段的資金。
決策變量mk:決定給第k階段投資的資金。
狀態轉移方程為

最優指標函數fk(Sk):當可投資金為Sk時,投資第k至第3階段所得的最大效益。
基本方程為
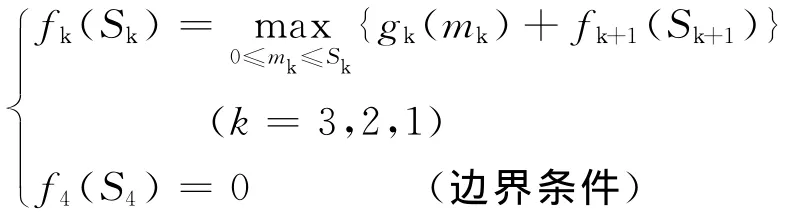
逐階段求解,便可得到一定投資額情況下,各試驗階段的最佳投資金額和試驗次數,f1(m)就是最大效益。根據這些數據制定每個試驗階段的實施方案,統籌安排試驗項目,就可以到最優決策的目的。
3 導引頭試驗數據采集系統設計
導引頭不同試驗階段的數據采集既有相同的地方,又各具特點。實驗室靜態試驗和導引頭對海試驗的數據采集,要求能夠全面記錄導引頭各種工作狀態,數據采集通道多、采樣率高,通道之間相位誤差小;導引頭海上掛飛試驗的數據采集,要求便攜性好,滿足振動要求,工作穩定可靠,數據記錄時間長。因此,需要針對不同條件下的試驗需求研究相應的數據采集設備。
實驗室靜態試驗和導引頭對海試驗的數據采集設備,主要用于實驗室,對設備尺寸和振動性能沒有過多要求,可以選擇PXI系統作為數采的儀器平臺,采用6通道100 MHz數據采集模塊采集導引頭IQ信號,32通道100 k Hz數據采集模塊采集導引頭其它電壓信號,16通道數字IO模塊采集導引頭狀態信號并對導引頭進行復位控制,用磁盤陣列實現較大數據存儲容量,系統組成如圖1所示。
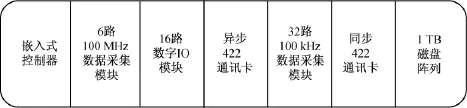
圖1 實驗室數據采集設備組成框圖
導引頭海上掛飛試驗對數據采集系統要求很高,需要采集記錄多路IQ信號、觸發信號和幾十路狀態信號,采集信號量非常多,還要根據飛機艙室位置大小確定設備的結構尺寸,設計減振裝置等。因此,單片機系統往往難以勝任,通常只能采取聯機處理模式,或者靠其它芯片擴展系統資源來完成系統的監測任務,大大增加了系統的復雜性,使系統的可靠性和穩定性受到影響。而FPGA擁有非常豐富的I/O資源,通常具有上百個I/O端口,可充分滿足系統對信號采集量的需求;FPGA的硬件可編程性,使在系統設計過程中,電路設計得到優化,最大限度地減少對硬件電路的改動;FPGA在采集速度上的優勢,也是單片機所無法比擬的[2]。因此,接下來以FPGA為邏輯控制核心進行多路數據采集系統的方案設計。
3.1 數據采集系統硬件設計
數據采集設備主要由工控機和數據采集記錄器組成,通過USB接口進行數據交互。數據采集記錄器可分成4個功能模塊(如圖2所示),其中FPGA是該系統的核心,主要對調理過的導引頭參數進行采集,并將采集到的參數在其內部處理后送給工控機。
(1)主控卡
由USB接口電路、FPGA主控及緩存電路,電源轉換模塊和全局時鐘組成。
主控卡的主要功能:通過USB接口接收工控機傳來的各種命令(如讀數、擦除等指令),并由FPGA主控電路控制讀取其余各卡上存儲的數據,通過USB接口發送給工控機。電源轉換電路負責將外部數據的+28V電源轉換成采集記錄器內部需要的電壓,并實現電源的輸入輸出隔離。全局時鐘負責給多塊高速數采卡提供統一的時鐘,使多路模擬信號同時進行采集,以保證信號的相差要求。
(2)低速數采卡
由遙測數據采集電路、信號隔離電路、FPGA控制電路和數據存儲電路組成。
低速數采卡的主要功能:負責多路低速遙測信號的隔離、采集與存儲,將遙測信號中的控制信號(S1,S2,PWS,T/S,DG,REF,F0~F4)隔離后送入總線背板卡上,供多塊高速卡進行邏輯控制。
(3)高速數采卡
由信號隔離電路、數據采集電路、FPGA控制及緩存電路和數據存儲電路組成。
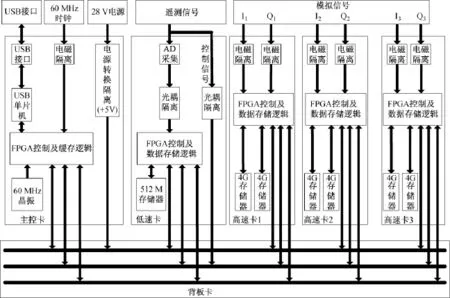
圖2 數據采集記錄器結構框圖
高速數采卡的主要功能:在外部輸入控制信號(S1,S2,PWS,T/S,DG)的控制下,實現多路I/Q信號的采集與存儲。多塊高速數采卡上的AD轉換器用主控卡提供的統一時鐘進行工作,以滿足多路I/Q信號之間的相位要求。采集到的數據在FPGA控制下存入存儲器。存儲器中的數據最終在主控卡的控制下通過USB接口發送給工控機,供工控機軟件分析與處理。
(4)背板卡
背板卡負責各卡的通信和供電。主控卡、低采卡和高速數采卡通過CPCI連接器插到背板卡上,各卡之間通過背板卡上的總線進行通信和供電。總線包括數據總線、控制總線和電源線。
板卡連接方式:各個板卡和背板之間通過CPCI連接器連接。
電源隔離:DC-DC轉換器對外部輸入的+28V電源進行了隔離。
信號隔離:針對不同的輸入信號采取不同的隔離措施。遙測信號通過光耦進行隔離。模擬信號通過隔離變壓器進行電磁隔離。
3.2 系統軟件總體設計
考慮到操作系統的穩定性、資源占用、程序運行效率等因素,選用Windows XP操作系統。軟件開發環境Lab VIEW采用圖形化編程,繼承了傳統編程語言中的結構化和模塊化編程的優點,支持多種系統平臺,可提供豐富的函數庫,支持數據采集板、GPIB設備、串口設備、VXI/PXI儀器,提供CLF模塊調用Windows動態連接庫和用戶自定義的動態連接庫中的函數,便于用戶利用其它軟件平臺編譯的模塊[3],因此選用Lab VIEW軟件編程實現系統的控制和管理。
軟件主要完成數據采集、存儲、分析與波形回調等功能,為便于系統擴展和易于維護,系統軟件設計采用模塊化思想,主要包括初始化模塊、自檢模塊、通訊模塊、通訊接口驅動模塊、采集控制模塊、數據管理模塊和顯示模塊等。系統軟件總體框架如圖3所示。由主模塊通過調用適當的功能模塊,控制系統的初始化,并根據當前的任務狀態,控制整個系統軟件的流程,完成各項任務。
4 結束語
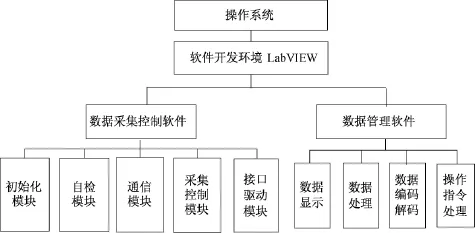
圖3 系統軟件框架
本文采用動態規劃法進行反艦導彈導引頭試驗階段的總體設計,將整個導引頭試驗過程設計成實驗室靜態試驗、導引頭對海試驗、導引頭海上掛飛試驗三個階段,合理控制試驗次數,統籌安排試驗項目,以達到最優決策的目的,為后續導彈定型試驗奠定基礎。通過研究導引頭各試驗階段數據采集分析方法,以FPGA為邏輯控制核心進行多路數據采集系統的方案設計,充分利用各階段試驗數據對導引頭的性能指標進行各個層次、各個方面的考核,加強了導引頭試驗數據的開發和利用,具有重大的軍事與經濟效益。
[1] 胡運權.運籌學教程(第二版)[M].北京:清華大學出版社,2003:203.
[2] 李保剛,馬登武.FPGA在多路數據采集系統中的應用研究[J].計算機測量與控制,2012,20(4):1138.
[3] 林建榮,吳桂初.Lab VIEW 虛擬儀器與Pasco數據采集系統接口研究[J].浙江傳媒學院學報,2006,(2):44.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25