基于電力線載波通信技術的LED路燈控制系統設計
2012-12-04 03:24:48唐顯錠蔣紫東劉木清
照明工程學報 2012年2期
朱 旭 唐顯錠 蔣紫東 徐 峰 馮 輝 胡 波 劉木清
(1.復旦大學電光源研究所,先進照明技術教育部工程研究中心,上海 200433;2.復旦大學電子工程系,數字信號處理與傳輸實驗室,上海 200433)
1 引言
LED作為第四代照明光源,近幾年得到了巨大的發展,其光效等性能指標快速提高而價格快速下降,已經突破了顯示、景觀照明等常規的應用領域,在道路照明等定向照明中應用得越來越多,越來越具有競爭力[1]。
目前我國路燈控制系統主要采用定時控制的方式,一般定時器會有冬夏兩種定時模式。這種方式可以實現路燈的定時自動開關,但缺點在于設定的時間不能調整,季節變化時會出現開關燈時間與晝夜變換時間不匹配的現象,也無法對路燈狀態進行監測。
與傳統光源相比,LED具有節能和易于控制兩大顯著特點,而現有的路燈控制系統顯然無法將這些優點體現出來。因此,針對LED路燈,有必要重新設計與之配套的智能路燈控制系統。本文將介紹基于電力線載波通信技術的LED路燈控制系統的設計,該系統依托現有路燈網絡,無須重新布線,使得改造成本最小化,并能夠實現對LED路燈的遠程控制開關,調光,查詢電流及電壓等功能。
2 系統組成
整個智能控制系統架構如圖1所示,主要包括了上位機 (PC),集中控制器 (ECC)及由載波通信模塊 (TN)和控制終端 (MCU)組成的單燈控制器三大模塊,采用PC與ECC間的GPRS通信,ECC與單燈控制器間PLC通信的兩級通信機制。其中集中控制器和載波通信模塊,我們選用了瑞斯康公司的ECC3001和RISE3501芯片。本文主要涉及單燈控制器和上位機程序的設計。
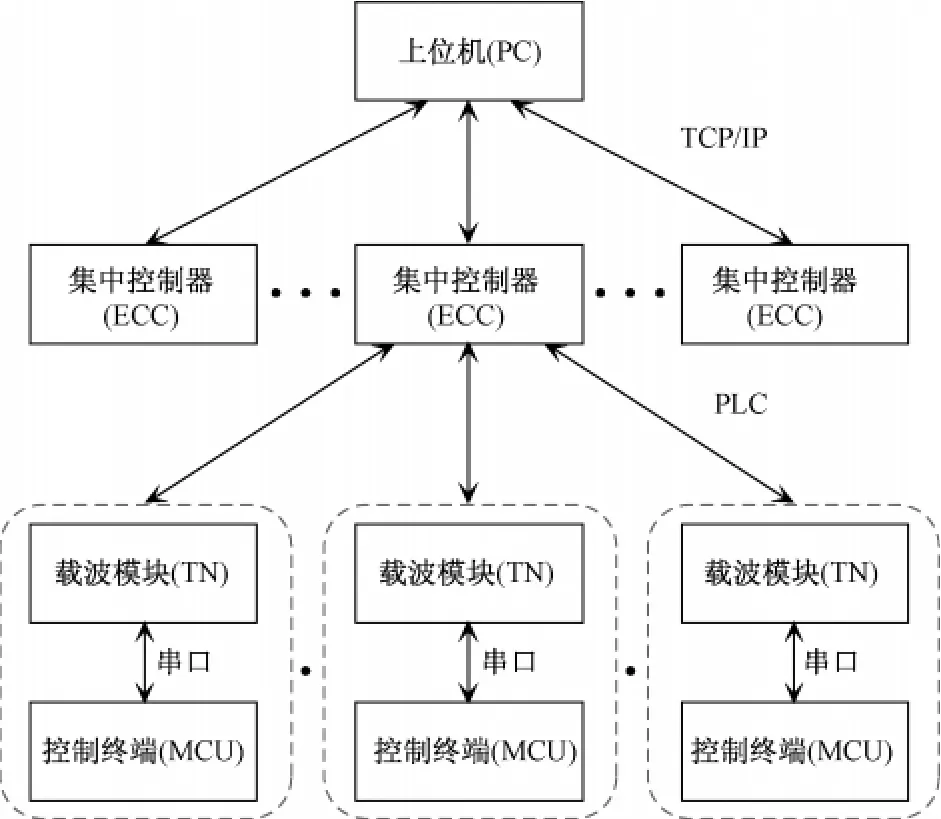
圖1 基于電力線載波通信技術的路燈控制系統架構
3 單燈控制器設計
單燈控制器主要由載波通信模塊和MCU電路組成。載波通信模塊內含有集成電路芯片RISE3501。RISE3501是一款專用于電力線載波通信的單片系統芯片。
3.1 載波通信模塊外圍電路設計
載波通信模塊的工作還需要外圍電路的支持,下面介紹配合載波通信模塊工作的外圍電路。
3.1.1 載波信號耦合電路
如圖2所示,輸入端L線上串有一個0.22μF/275V聚酯電容,用來隔離50Hz交流電和通過有用的高頻載波信號。并有一個1∶1耦合線圈 (2.2mH)以傳輸有用的載波信號,同時起到隔離高壓作用,讓大部分高壓降在聚酯電容上,使后面的電路不帶高壓以保護人身安全。TVS-8.5V(瞬變二極管)防止快速沖擊,保護后端電路。
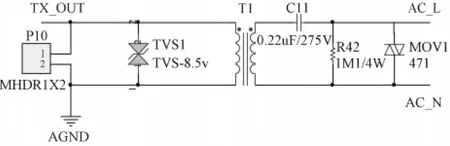
圖2 載波信號耦合電路
3.1.2 看門狗電路
通信模塊定時給出看門狗輸入信號WDI給看門狗芯片,若WDI信號停止,看門狗芯片通信模塊進行復位,電路如圖3所示。
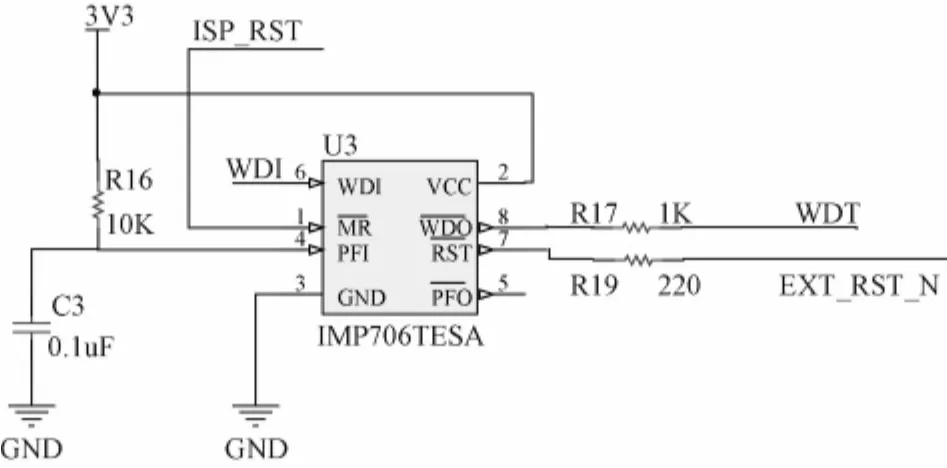
圖3 看門狗電路
3.1.3 過零檢測電路
如圖4所示的過零檢測電路正過零導通,過零檢測用于通信模塊判斷相位。
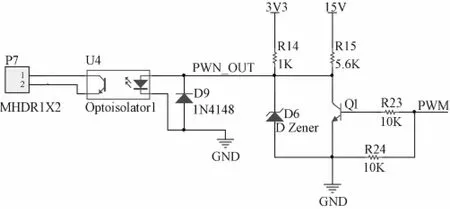
圖4 過零檢測電路
3.2 MCU電路設計
MCU的工作流程圖如圖5所示,MCU與載波通信模塊之間通過串口進行通信。載波通信模塊將接收到的上位機命令發送給MCU,MCU進行相應的處理后再將響應結果返回給通信模塊。
MCU采用的是silicon公司的c8051f330單片機,通過MCU電路實現的功能包括燈的開關控制,火線電壓及燈上電流的測量,以及MCU輸出PWM信號對燈進行調光等。
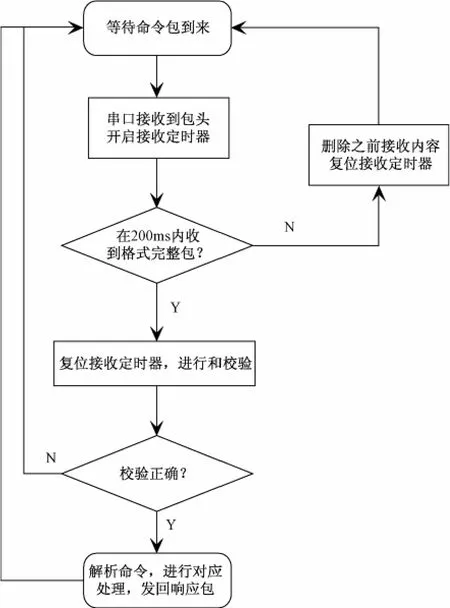
圖5 MCU程序流程圖
3.2.1 燈開關控制
對路燈的開關控制通過繼電器來實現。繼電器接5V電源,繼電器的通斷由MCU的RELAY信號進行控制。電路如圖6所示。
3.2.2 電流與電壓測量
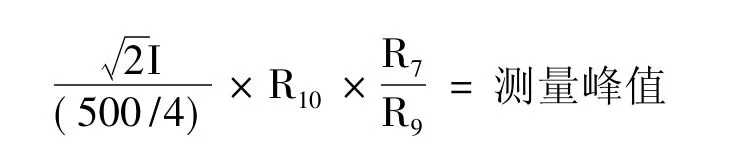
電流測量的電路如圖7所示,其原理是在接入路燈的火線上串上一個電流互感器 (線圈比4∶500),在次級得到與線圈比相反的電流,在R10上得到相應的電壓信號。經運放LM358放大10倍,同時由于D1和D4的作用反向電壓被削去。經過運放的信號CURRENT接到MCU上進行AD采樣,通過測量信號峰值計算電流互感器初級電流。AD以每個市電周期50個點的速度采集數據,取其中最大的一個作為信號的峰值。為了減小噪聲的影響,每次測量均測得幾十個周期的峰值進行平均 (MCU程序中發送給PC的是幾十個峰值的和,PC機程序計算平均值)。設電流互感器初級的電流有效值為I,那么此電流I和MCU測得的信號峰值的關系為:
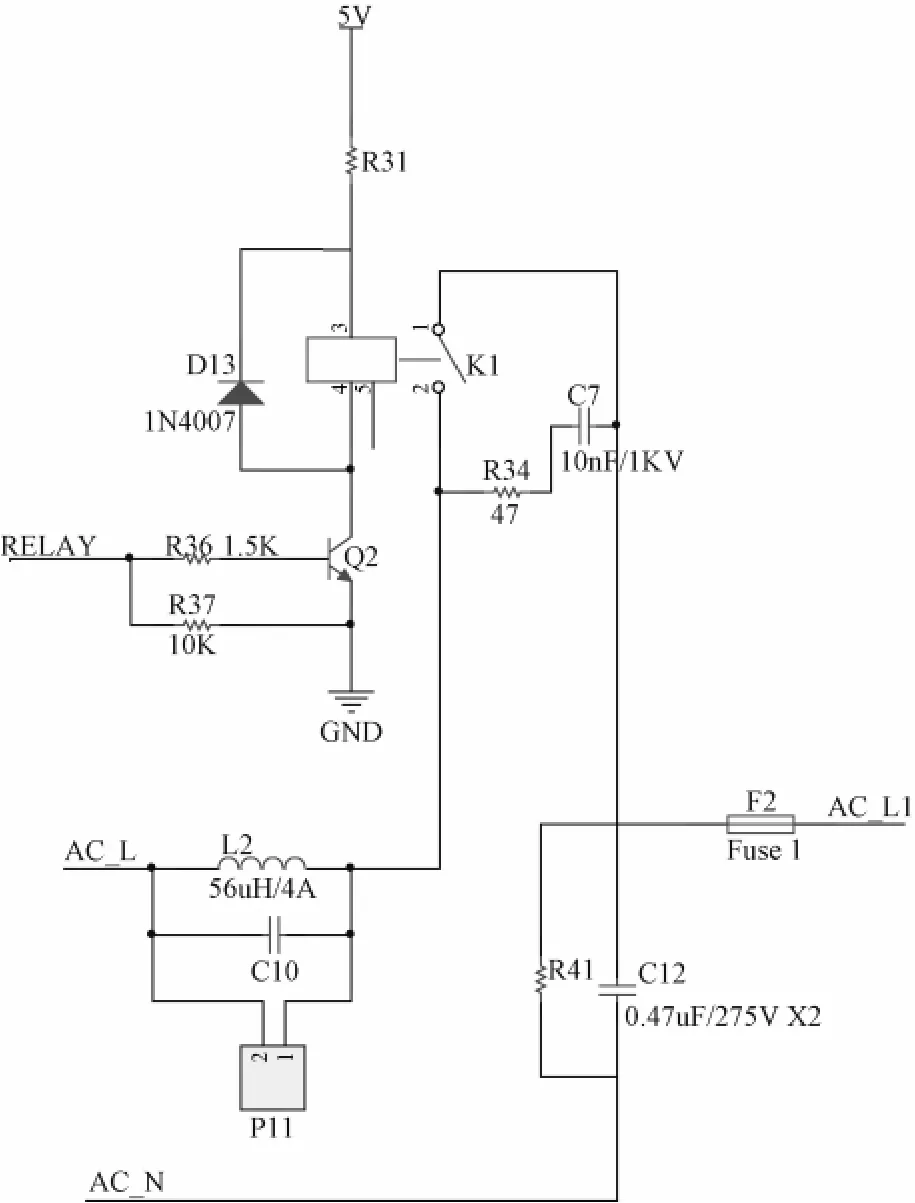
圖6 燈開關控制電路
為了使測量更準確,R7,R9,R10均需使用精密電阻,否則需在MCU端做一定的補償校正。
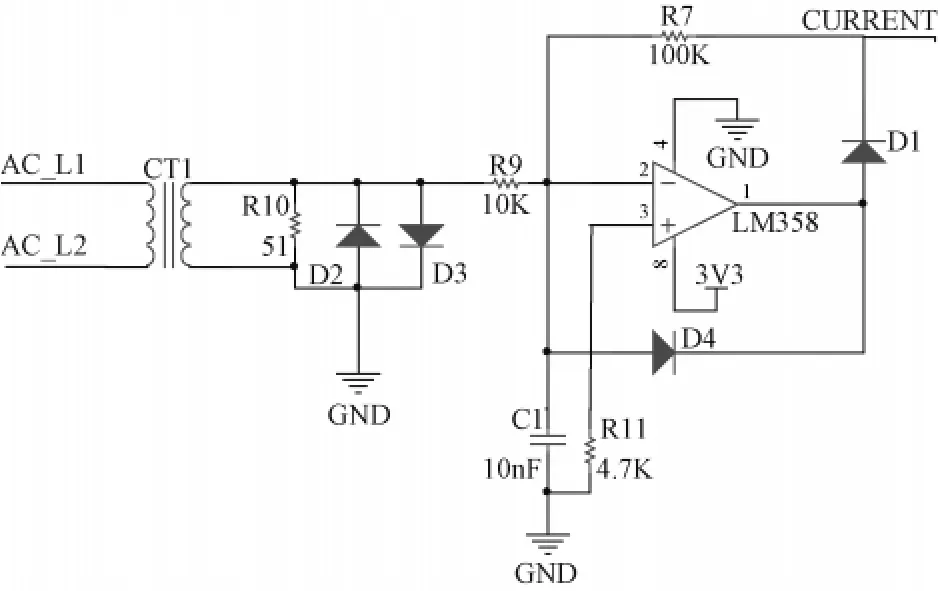
圖7 電流測量電路
電流互感器如果要滿足電流比等于線圈在數比的反比,負載電阻R10則需要盡可能的小,然而此處若R10過小,會導致R10上電壓信號過小,使得噪聲影響很大,所以此處R10取值為51歐,由此帶來的誤差是線性的,可在PC端進行校正。調試中得到的真實、測量以及校正后的電流如圖8所示。
校正后的公式為:
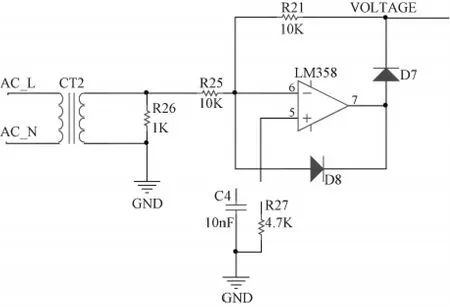
圖8 電流校正對比
校正后測量值 =1.365×校正前測量值-141.3(mA)
電壓測量的原理與電流測量完全類似,變壓器并聯在電源線上,MCU測量計算的方法與電流測量完全相同。同樣,為了測量準確,R21、R25和R26需要用精密電阻。不過電壓測量不存在電流測量中需要校正的問題。電路如圖9所示。
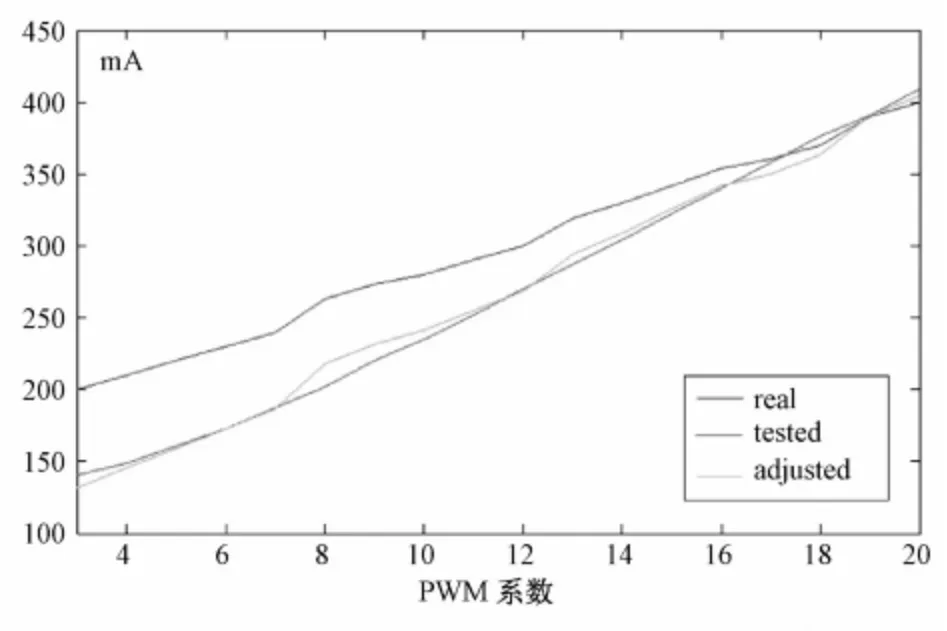
圖9 電壓測量電路
3.2.3 PWM輸出電路
單片機的PWM信號經三極管驅動,再經光耦隔離后接入LED路燈驅動器的PWM輸入口,實現調光功能。電路如圖10所示。
4 上位機程序設計
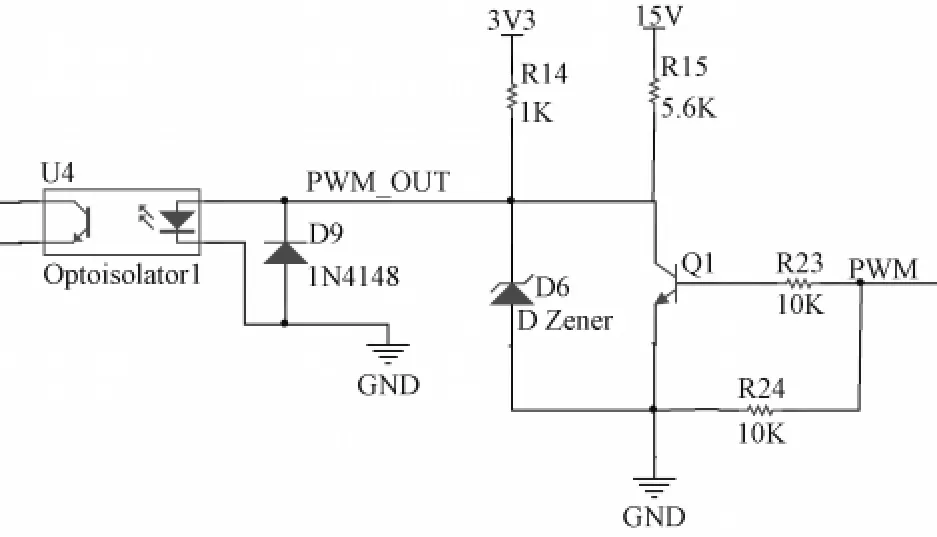
圖10 PWM輸出電路
我們使用QT4.7開發上位機程序,Qt是一個跨平臺的C++應用程序開發框架,具有優良的跨平臺特性、面向對象、豐富的API、大量的開發文檔等優點[2]。我們可以把它看成是一個第三方的C++的類庫,提供了豐富了API。在本設計中,我們主要用到了GUI和網絡功能的類庫,程序共由6個類組成,如表1所示。
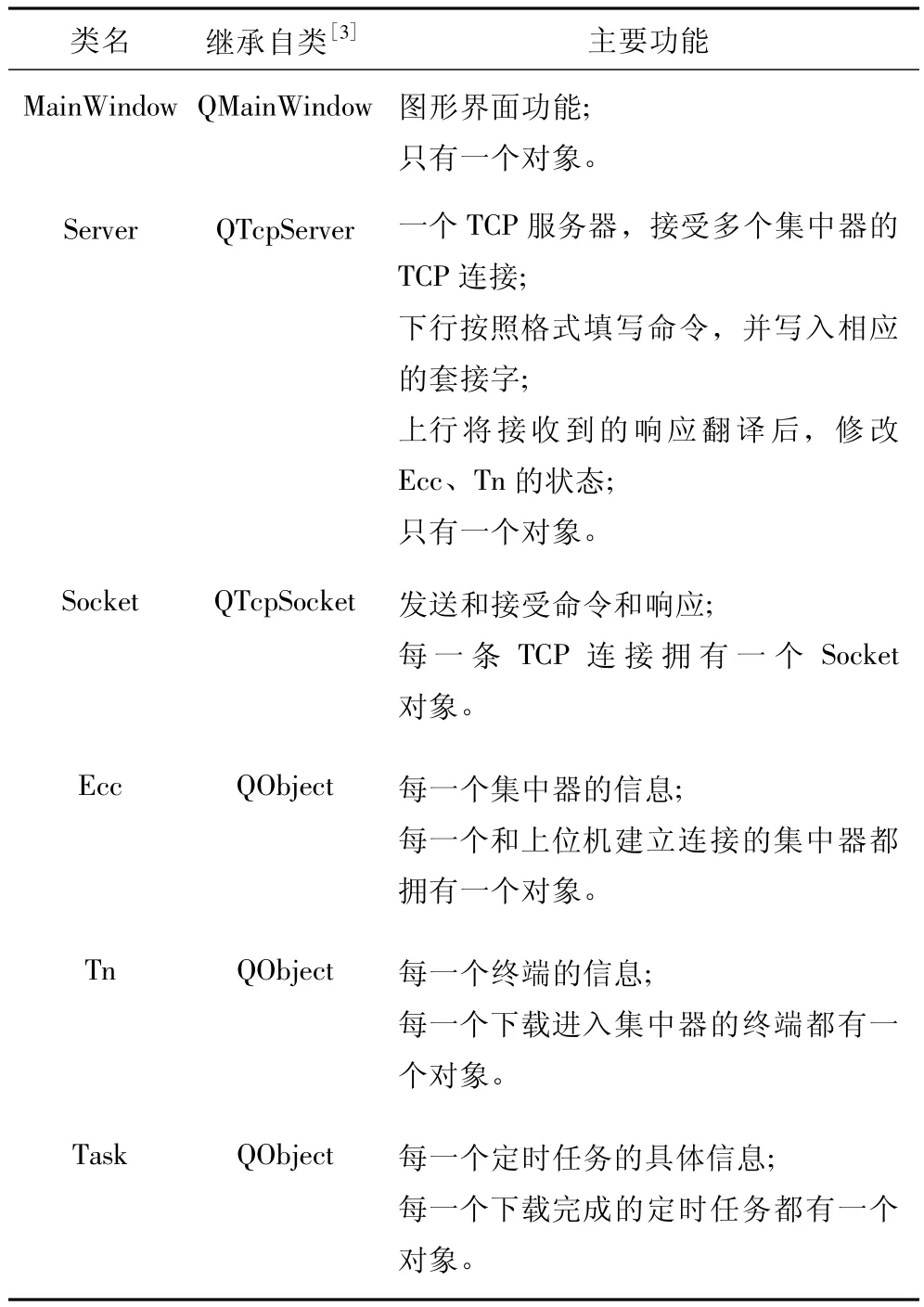
表1 上位機程序內容
上位機程序主要工作流程為:
1)上位機發送命令基本流程:
a)在MainWindow上,用戶選擇相應命令;
信度指測量結果的一致性、穩定性以及可靠性,一般多以內部一致性系數(Cronbach’ α)來檢驗。如表1所示,各構念的Cronbach’ α系數的變動范圍在0.919~0.951之間,均大于0.7,因而可以說研究中采用的量表具有較好的信度。另一方面,構念的組合信度(CR)也是判別內在質量的標準之一,各構念的CR值均在0.60以上,表示量表的內在質量理想。
b)命令傳遞給Server,Server按要求填寫相應幀格式,并選擇相應的Socket寫入命令;
c)Socket發送命令給相應的集中器。
2)上位機接收響應基本流程:
a)Socket接收響應,判斷命令合法性;
b)Server接收響應,翻譯響應的內容,根據這些內容修改Ecc,Tn,Task的狀態信息;
c)MainWindow根據Ecc,Tn,Task的狀態信息,更改圖形界面的顯示內容。
3)命令沒有及時響應的判斷:
a)發送命令時,Server根據命令修改Ecc的工作狀態;
b)Ecc開始計時,這里選擇60s。如果是組播或者廣播,則計時為60s*節點個數;
c)接收對應Ecc工作狀態的響應時,計時停止。如果一直沒有響應,則界面顯示超時。
5 試驗結果
根據以上設計,我們在實際道路上安裝了一個集中控制器和8個單燈控制器,LED路燈間距為30米。在實際電網環境中連續測試了6天,通過上位機與最遠的第8個控制器進行通信,來驗證系統的通信成功率和穩定性。
表2是本次的測試結果,通信成功率穩定在94%左右,燈的開關、電壓及電流測量、定時控制、調光等各項功能均能正常實現。在實地試驗中,8個路燈的總響應時間在4~5秒左右,在可接受的范圍內。
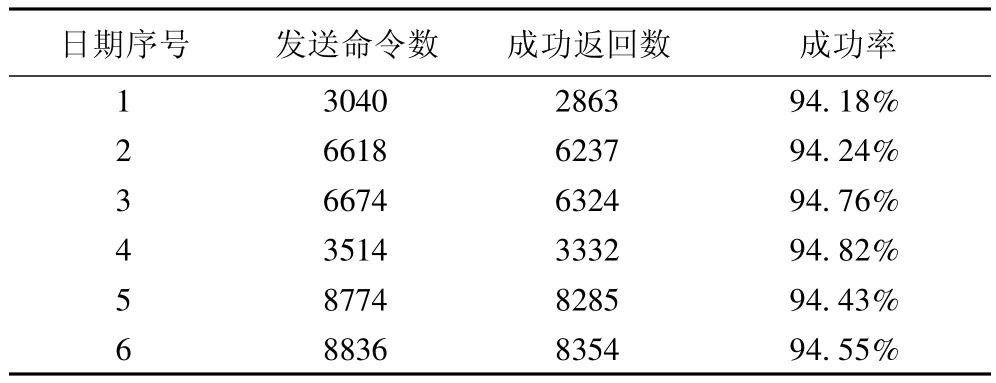
表2 通信成功率試驗結果
6 總結
基于專業的電力線載波模塊和集中控制器,本文設計了完整的LED路燈控制系統。通過實地試驗,初步驗證了該系統的可靠性和穩定性,可以適用于實際的道路照明中,為后續大規模應用打下堅實的基礎。
[1]朱旭,張震,劉木清.青島膠州灣隧道照明應用的研究與實踐.照明工程學報,2010.21(z1):57~60.
[2]陳靖,王振宇.Linux平臺上的組件開發技術.計算機與數字工程,2005.33(5):25~28;68.
[3]朱吉佳,蔡家麟.基于Qt的業務監控系統界面設計與實現.計算機技術與發展,2008.18(3):236~239;242.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中國生殖健康(2019年3期)2019-02-01 06:12:26
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
