國外月球探測有效載荷進展狀況
2012-12-04 01:02:06楊生勝薛玉雄把得東曹洲
真空與低溫 2012年4期
關鍵詞:環境
安 恒,楊生勝,薛玉雄,石 紅,把得東,曹洲
(蘭州空間技術物理研究所真空低溫技術與物理重點實驗室,甘肅蘭州730000)
1 引言
在19世紀50年代末,美、蘇等國開始對月球進行探測,二戰后,月球探測進入相對低潮期。而進入20世紀90年代,月球探測活動開始復蘇,特別是美國前總統布什于1989年提出了“重返月球”的設想,美國重啟月球探測研究,分別于1994年和1997年發射了“克萊門汀”探測器與“月球勘探者”探測器。進入21世紀,月球探測更加頻繁,進行月球探測發射活動的國家由美、蘇兩國擴展到了中國、日本、歐洲、印度等國。
美國在上世紀月球探測成功的基礎上于2004年宣布了“新太空計劃”,該計劃中包括了較為完整的重返月球計劃。歐洲于上世紀末啟動了月球探測計劃,2003年發射了“智慧-1號”月球探測器,成功進行了月球探測。日本于上世紀90年代開始陸續實施月球探測活動,2007年成功發射“月亮女神”探測器進行了月球探測。印度于本世紀初啟動了月球探測計劃,2008年成功發射“月船1號”探測器,成功進行了月球探測。我國探月工程于2004年正式啟動,于2007年發射了“嫦娥一號”探月衛星,成功進行了月球探測。截止至2011年5月,人類共發射了221顆月球探測器,占到了深空探測器總數的約70%。歷次月球探測都搭載了多種有效載荷,以對月球空間環境、月球元素、地形地貌等進行探測。
2 國外月球探測有效載荷發展狀況
2.1 美國
美國從阿波羅計劃開始,已成功發射了多顆月球探測器,尤其是20世紀90年代提出“重返月球”計劃后,更是發射了多顆月球探測器,此時的月球探測主要以環境探測為主,如1994年和1997年發射了“克萊門汀”探測器與“月球勘探者”(Lunar Prospector)探測器。于1998年1月7日成功發射Lunar Prospector探測器如圖1所示,探測器飛行在圓形極軌道,軌道高度100km,每13.7天即可覆蓋月球全表面[1]。探測器外形結構如圖 2 所示[2]。
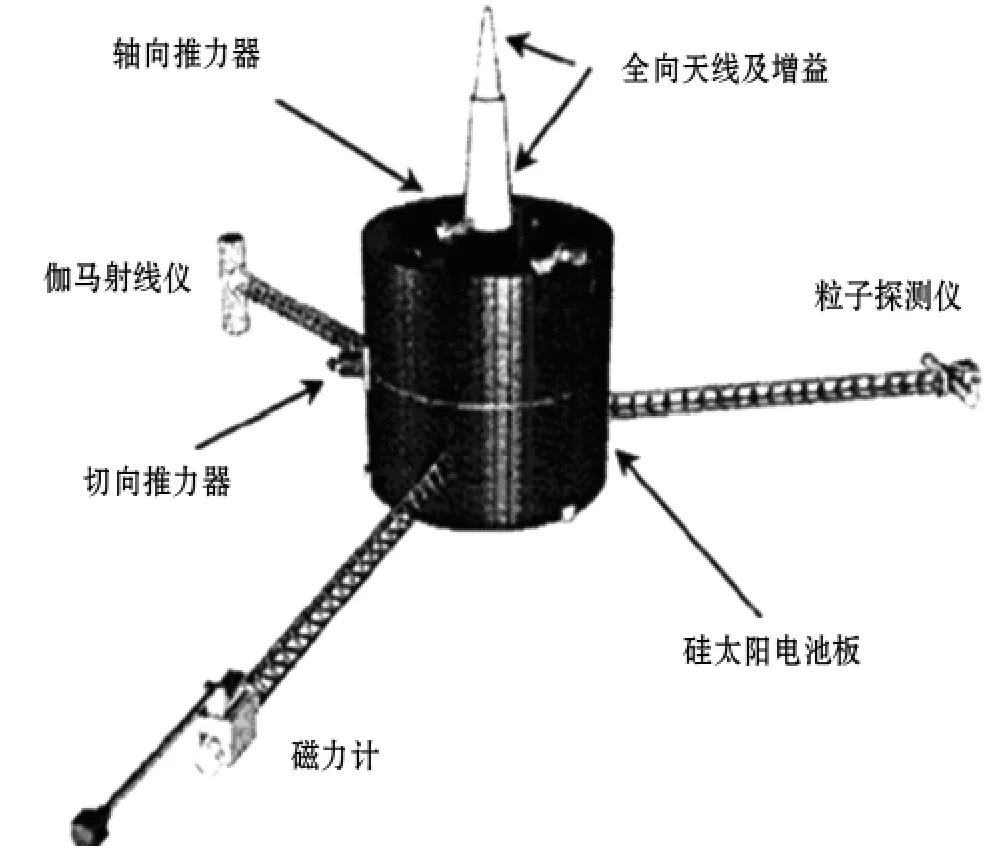
圖1 Lunar Prospector外形示意圖和載荷配置

圖2 LRO探測器外形結構圖
探測器搭載了5個有效載荷(如下表1所列),主要用于探測近月軌道的輻射環境。

表1 LP探測器配制的環境載荷
進入21世紀,美國在之前月球探測成果的基礎上于2004年宣布了“新太空計劃”,該計劃包括了較為完整的重返月球項目,將分階段發射多顆月球探測器,2009年6月18日成功發射的LRO探測器就是該計劃中的一個,其載荷配制如下表2所列。
2011年9月10日,美國發射了“月球重力場反演與內部實驗室”(GRAIL)探測器[3]。GRAIL由A、B雙星組成。通過相互間的精確測距來反演月球重力場。由于該任務采用了小能量轉移軌道,因此,地月轉移需要3~4個月的時間。“GRAIL”的效果圖與實物如圖3所示。
GRAIL探測器共配制了兩類載荷:
(1)月球重力測距系統(LGRS)
LGRS主要用于精確測量GRAIL-A與GRAIL-B之間的距離變化情況,測量精度在微米量級,是本次任務的主載荷。LGRS需要A、B雙星之間配合工作,因此兩顆GRAIL衛星上均需配置相同的LGRS載荷[4]。LGRS的原理框圖如圖4所示:
(2)小型月球成像系統(MoonKAM)
除了月球重力場測量與反演的主任務外,GRAIL還配制了一套數字成像系統,主要用于月表圖形成像。MoonKAM系統有四個攝像頭,拍攝不同方向的月球影像,包括一個窄視場鏡頭(視場角5.4°)和三個寬視場鏡頭(視場角44°)。

表2 LRO的載荷配制及性能指標
綜上所述,從美國月球探測器搭載的有效載荷發展狀況可以看出,早期的月球探測以科學探測為主,主要用于科學研究且載荷功能單一,后期的月球探測,除了科學探測以外,還對月球輻射環境以及相應的輻射效應進行了探測,并且單個探測器搭載的載荷數量也相對增多,載荷的功能也越來越復雜,逐步向綜合化、多功能化趨勢發展。
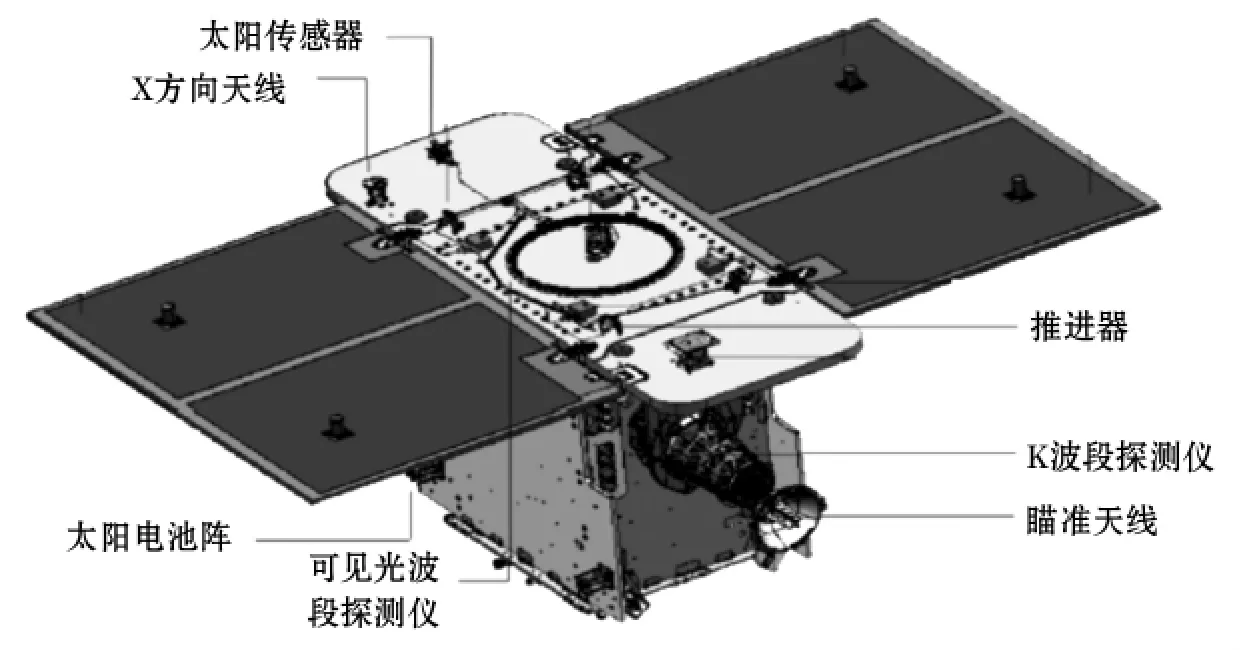
圖3 GRAIL探測器的效果圖

圖4 LGRS載荷的原理框圖
2.2 日本
日本自上世紀90年代開展月球探測活動,迄今已成功發射了多顆探測器。如1990年1月,日本發射了首個月球探測器 HITEN。如圖5所示。

圖5 HITEN探測器實物圖
日本首顆月球探測器,HITEN以技術試驗為主,唯一的科學目標為地月環境的塵埃測量與研究。攜帶的唯一一臺有效載荷為西德塵埃計數器(MDC),用來記錄撞向探測器的塵埃顆粒的重量、速度和方向,獲取地月轉移過程以及環月軌道附近的空間塵埃環境數據。
2007年9月14日,日本發射了“月亮女神”月球衛星[5]。“月亮女神”號由主環繞器和兩枚子衛星組成,日本航天界稱為“繼Apollo工程之后最大規模的月球探測任務”。“月亮女神”的外形效果圖與實物如圖6所示。

圖6 “月亮女神”探測器圖
“月亮女神”號探測器主要是為了探索月球和地球的起源,研究月球的形成和演化過程;觀測月球地表與空間環境;同時精確測量月球重力場。為此,搭載的有效載荷主要有多波段成像儀、地形測繪相機、測月雷達、月球磁強計、高清電視攝像機等[6],如表3所列。

表3 “月亮女神”載荷配制
2.3 歐空局
近年來歐空局的典型月球探測器是2003年9月27日成功發射升空的SMART-1探測器。SMART-1是歐洲的首顆月球探測器,也是人類第一個采用霍爾電推進系統月球探測器。如圖7所示。

科學目標 有效載荷 科學任務探測月球表層和次表層結構地形測繪相機 獲取月球表面高分辨地形數據測月雷達 利用高功率雷達脈沖,探測表面至數千米深度的月殼分層結構和構造特征激光高度計 利用高功率激光脈沖,精確測定月面地形高程,建立月球數字高程模型研究地球等離子體的行為結構帶電粒子譜儀 測量月球軌道處宇宙射線粒子的豐度,以及氡(Rn)、釙(Po)等放射性元素月球磁強計 測量月球及其附近由巖石剩余磁性形成的微弱磁場,反演月球剩余磁場衰變產生的阿爾法射線探測月球環境上層大氣和等離子體成像儀 在月球軌道處對地球磁層和電離層進行成像,探測月球電離層探測月球重力場分布等離子體分析儀 測量月球軌道上低能電子的三維空間分布和低能離子的質量分布無線電掩星觀測 測量VLBI射電源子探測器(V星)發出的無線電頻率信號的相位偏差,開展掩星觀測,空間四路多普勒測量 精確測定主探測器的軌道擾動,反演月球重力場高清晰電視畫面 高清電視攝像機 拍攝月球和地球的電視畫面,反演月球背面局部地區的重力場差分VLBI射電源 測定中繼子探測器(R星)和V星的軌道,特別是地球從月球地平線上升起的畫面
探測器主要用于對月球表面進行X射線和紅外線遙感采樣繪制地圖,從不同的角度拍攝插圖并建立月球表面地圖的三維模型;同時探測月球的化學成分組成,使用紅外線搜尋月球南極固態水的存在。因此,SMART-1共配置了7類載荷,具體如表4所列。
SMART-1在軌飛行中,成功獲得了一些科學成果,如X射線譜儀獲得了高分辨率元素分布圖;對月球遠地面進行了首次光譜探測;在Mare Crisium地區探測到鈣元素;獲得了月球南極光照較差地區的環形山光學圖像。

圖7 SMART-1探測器圖
2.4 印度
2008年10月22日,印度的首顆月球探測器“月船1號”在斯利哈里柯塔島發射。“月船1號”是印度的第一次月球探測。探測器包括一個月球環繞器和一個硬著陸器,如圖8所示。“月船1號”于2008年11月14日成功釋放硬著陸器,著陸于月球南極附近[8]。
“月船1號”主要是用于生成月球正面和背面的三維圖像(空間和高度分辨率為5~10 m),對全月面進行化學和礦物學測繪,約25 km的空間分辨率獲取鎂、鋁、硅、鈣、鐵和欽等元素的分布資料,約20 km的空間分辨率獲取氛、鈾和牡等大原子序數元素的分布情況,以推斷月球的早期演化史。因此,“月船1號”探測器共攜帶11臺有效載荷[9],其主要科學目標和相應有效載荷見表5所列。

圖8 “月船1號”探測器圖
3 月球探測有效載荷配制建議
隨著月球探測技術的發展,一些新技術、新型電子器件在探測器上的應用范圍越來越廣,導致有效載荷的性能越來越高,功能越來越多樣化。通過分析以上國外月球探測載荷配制的分析,建議月球探測載荷配制考慮以下幾個方面:
(1)加強對月球環境的探測,盡量減小空間環境對探測器的影響
要加強月球輻射環境引起的充放電效應、單粒子效應的研究,著重考慮輻射敏感器件的抗輻射優化設計,提高抗輻射能力。
(2)加強探測器異常預警能力
通過實時監測大范圍的高能太陽質子事件,及時發出預警信息,指導探測器的在軌管理和故障處理,盡可能最大程度的減小太陽質子事件對探測器的輻射損傷。
(3)加強集成化載荷的研制
隨著電子器件集成度的不斷提高,研制小型化、多功能的載荷,實現輻射環境與效應的綜合監測,提高工程應用能力。

表4 SMART-1載荷配制

表5 “月船1號”載荷配制

?
4 結語
從國外月球探測中看出,早期的月球探測以探測月球環境科學為目的,而后期月球探測器的載荷配制越來越全面,尤其是近些年來,國外的月球探測器對輻射效應進行了相應的探測研究,研制了一些輻射效應監測器,與輻射環境監測器配合,進一步全面了解月球輻射環境的危害性,為月球探測器的設計提供技術支撐。同時,探測器配制的載荷呈現出小型化、多功能化、模塊化的發展趨勢。
[1]Francisco J.Andolz.LUNAR PROSPECTOR MISSION HANDBOOK[M].Ames Research Center.April 10,1998.
[2]Richard Vondrak ,John Keller,Gordon Chin.Lunar Reconnaissance Orbiter(LRO):Observations for Lunar Exploration and Science[J].Space Sci Rev.2010(150):7 ~22.
[3]NASA's Exploration Systems Architecture Study,Final Report,NASA-tm-2005-214062.
[4]The Robotic Lunar Exploration Program(RLEP)-An Introduction to the Goals[J].Approach,and Architecture,AIAA.2005 ~2548.
[5]Kato M,sasaki s,Tanaka K,et al.The Japanese luIlar mission SELENE:Science goals and present status[J].Advances in Space Research.2008(42):294 ~300.
[6]鄭永春,鄒永廖,付曉輝.月亮女神探月計劃的有效載荷與科學探測綜述[J].航天器工程.2011(3):108~119.
[7]Bernard Foing.Smart-1 Instrument Technology[J].Planetary Science & Exploration.2003(12):118 ~126.
[8]Goswami J.N.,Annadurai M.Chandrayaan-1:India's First Planetary Science Mission To The Moon[J].Curr.Sci.96(4):486~491.
[9]Goswami J.N,Thyagarajan K,Annadurai M.Chandrayaan-1:Indian Mission To Moon[J].Lunar and Planetary Science .2006:1567~1577.
猜你喜歡
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
新世紀智能(英語備考)(2019年12期)2020-01-13 06:07:18
瘋狂英語·新策略(2019年9期)2019-10-17 01:51:34
中國生殖健康(2019年11期)2019-01-07 01:28:02
中國生殖健康(2018年6期)2018-11-06 07:09:28
濰坊學院學報(2017年2期)2017-04-20 08:44:31
中國環境監察(2016年5期)2016-10-24 05:25:52
中國商論(2016年33期)2016-03-01 01:59:38