XJ150型無風載繃繩修井機研制及應用
2012-12-08 02:25:04楊文新曹立明王建剛王斌虎李培江
石油礦場機械 2012年3期
關鍵詞:作業
楊文新,曹立明,王建剛,王斌虎,李培江
(1.新疆油田公司井下作業公司,新疆克拉瑪依834000;2.江漢石油管理局第四石油機械廠,湖北荊州434000) *
XJ150型無風載繃繩修井機研制及應用
楊文新1,曹立明2,王建剛1,王斌虎1,李培江1
(1.新疆油田公司井下作業公司,新疆克拉瑪依834000;2.江漢石油管理局第四石油機械廠,湖北荊州434000)*
為滿足沼澤、沙漠及井位密集地區的小修作業要求,加快生產進度,開發了一種車載自走式無風載繃繩修井設備。介紹了其結構原理及設計的關鍵點,并對其應用效果進行統計分析。目前該設備已在新疆油田得到廣泛應用。
桅型井架;風載繃繩;修井機
近年來,隨著國內石油鉆采設備研制能力的迅速提升,車載自走式修井設備已形成系列化生產,提升載荷300~2 250kN,技術性能已達到國際同行業先進水平。
車載自走式修井設備配備的井架基本為桅型井架,作業時需要在井架頂部四角安裝4根風載繃繩,并與地錨樁連接固定,每個地錨樁沿繃繩方向承拉能力>75kN。由于沼澤、沙漠、丘陵、山地及井位非常密集的井場沒有位置或無法打地錨樁,需要使用吊車、平板車吊運水泥條代替地錨樁。這樣不僅耗資、耗力,而且由于地錨坑受力有限,作業安全無法保障。
為了適應沼澤、沙漠及井位密集地區的作業需要,在保證作業安全的條件下,達到方便操作、降低作業強度、提高作業效率的目的,研制了一種XJ150型無風載繃繩修井機,配備了風載穩定裝置,省略了挖繃繩錨坑、打地錨樁、水泥條搬運等耗資、耗力、耗時的工序,減少了作業前準備工作量,降低勞動強度,同時解決了作業時井架過度偏載或整車側翻的隱患。
1 結構組成
該修井設備包括井架、底盤車、車架、發動機、支撐座、傳動系統、絞車、支架、司鉆控制箱等,整體結構如圖1所示。其重要特征在于其風載穩定裝置設在修井機尾部的車架上。
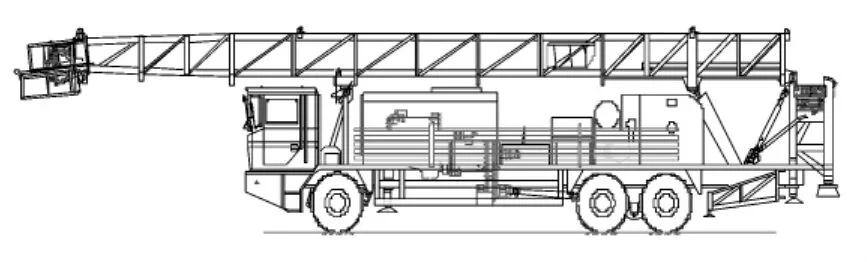
圖1 XJ150型無風載繃繩修井機整體結構
為了能更好地監測修井機作業時的受力狀況,在修井機車架前部的支撐座和活動支腿上設有傳感器,通過電纜與司鉆控制箱上的智能電子警示儀連通。修井機作業前,首先調整車架前后支撐座及液壓小底座,將整機調平;接著展開防側翻支架至與車架垂直的位置,安裝固定支撐桿與車架相聯,形成三角形穩定結構,通過調整絲桿可調整支撐座的高度;然后起升井架到直立狀態后通過定位銷與井架底座相聯,調整內載荷繃繩,使內載荷繃繩受一定預緊力;最后根據整機實際平衡情況在智能電子警示儀上設定支腿上傳感器的安全數據值即可進行作業,當任一支撐受力變化超過設定值范圍時智能電子警示儀立即發出聲光警示。
2 主要技術性能指標
通過對國內油田實地調研:作業井深約1 000 m、作業載荷在300kN以內的占較大份額,作業環境風速一般在4~5級以下。根據以上調研,首先確定了無風載繃繩修井機工作的額定載荷為300kN,考慮到修井機在作業過程中有可能發生卡管等工程事故,為了能保證修井機正常解封、解卡作業,在修井機額定載荷的基礎上增加了1.95的載荷安全系數,即修井機最大載荷為585kN。而無風載繃繩修井機主要用于修井作業,因此在最大鉤載作業下,使用?63.5mm(2英寸)加厚油管的修井深度為2 600m,其各項技術性能參數如下:
修井深度 2 600m(?63.5mm加厚油管)
額定載荷 300kN
最大鉤載 585kN
發動機額定功率 216kW
井架高度 18m(從地面到天車底部)
游動系統 3×4
底盤驅動形式 6×6
具有傾斜報警功能,能夠實現一體化作業。
3 技術難點及創新點
XJ150型無風載繃繩修井機采用18m桅桿式井架,桅桿式井架向井口方向有3~5°的傾角。因此,如何確保作業時整機的安全、可靠性是研制的難點及關鍵之處。
3.1 整體結構受力合理性
桅桿式井架作業提升管柱時將產生沿井架垂直向下的外力,會導致修井機沿井架方向的縱向傾倒,同時當修井機作業時還受到兩側方向的外在風力,目前修井機完全依靠4根風載繃繩來平衡所有外力,當取消4根風載繃繩的作業工況下,為滿足修井作業要求進行了結構改進設計。
1) 井架底座的設計 井架底座是由4根立柱及型材焊接而成的一個側面呈矩形、水平方向呈“門”字形的結構架。其中2個立柱下端焊接在車架上,上端與桅型井架下端通過鉸支座活動聯接;另外2個立柱上端與桅型井架下端活動聯接,下端聯接液壓小底座。液壓小底座是1個整體式的矩形塊,其上設有1對可液壓升降的支腿,用于調整車架水平,并承受井架在3~5°的傾角時提升載荷產生的垂直向下力,提高防傾翻能力。
2) 側向支座設計 在車架尾部的兩側通過活動鉸支座聯接了2個帶活動支腿的防側翻支架,其采用型鋼焊接而成,支架可繞銷軸展開、收攏,活動支腿是一個帶調整絲桿的支撐座。支架展開時安裝固定支撐桿,與支架、車架相聯形成三角形穩定結構,增大側向穩定力矩,抵消井架作業時產生的側向不平衡力。防側翻支架結構如圖2所示。
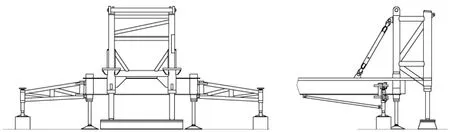
圖2 防側翻支架結構
3.2 整機安全可靠性
1) 側后翻警示裝置。為了解決修井機在無防風繃繩的情況下能安全、可靠地工作,在修井機前后支腿增加了壓力傳感器,在司鉆控制臺上設置了電子報警裝置,嚴密監控各液壓支腿的支反力變化情況,如有異常,提前及時報警。
2) 多種工況作業時所產生的變化外力對整機的影響。采用美國結構軟件公司的StruCAD*3D三維空間梁結構分析計算軟件對無繃繩修井機進行作業工況受力計算。受力支撐點如圖3所示。
XJ150型無風載繃繩修井機在4種工況下的受力計算如下:
工況1:最大鉤載585kN,0°方向(從車頭向車尾方向)35節風(8級)。
工況2:最大鉤載585kN,90°方向(從車左右側垂直車身方向)35節風(8級)。
工況3:0°方向最大風速60節(12級),無鉤載。
工況4:90°方向最大風速60節(12級),無鉤載。
不同工況及載荷下建模計算結果如表1~2所示。
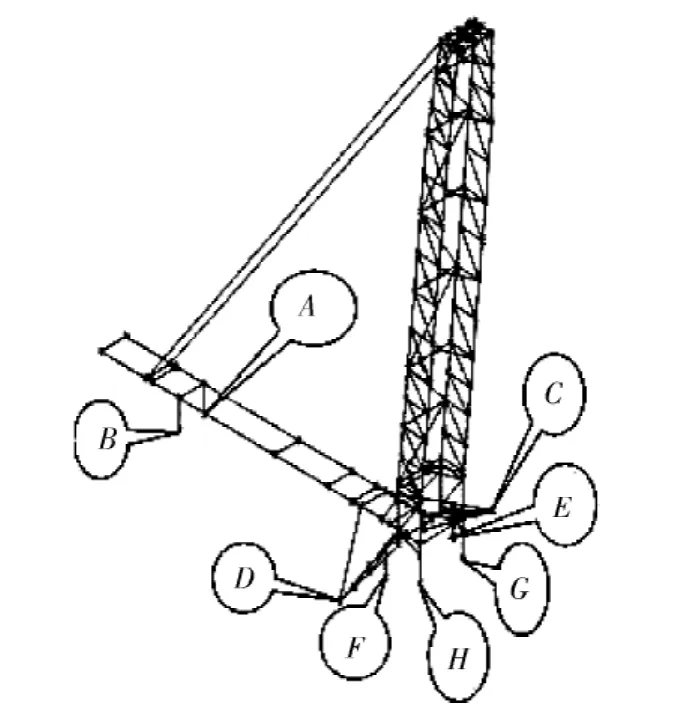
圖3 無風載繃繩修井機各受力支撐點

表1 4種工況下各液壓支腿受力支撐點支反力 kN

表2 在4種鉤載工況下各液壓支腿受力支撐點支反力 kN
1) 在4種工況下,前部支點A、B所受地面支反力全部為正值,這說明在4種工況和4種鉤載作業下,XJ150型無風載繃繩修井機在施工作業工程中前橋不會離開地面,也說明修井機不會向后傾翻。
2) 在4種工況下,旋轉式防側翻裝置支點C、D所受地面支反力全部為正值,這說明在4種工況和4種鉤載作業下,XJ150型無風載繃繩修井機在施工作業工程中修井機防側翻裝置2個支撐點都不會離開地面,也說明修井機在4種工況下作業時不會向左或向右傾翻。
4 現場應用
4.1 應用效果評價
XJ150型無風載繃繩修井機(如圖4)投產第1年施工67口井,現場對其立放井架所用時間進行測時并取平均值,再通過與普通同級別修井機進行對比,從而對XJ150型無風載繃繩修井機的應用效果進行評價。

圖4 現場作業XJ150型無風載繃繩修井機
該設備與同級別普通修井機作業時間對比如表3所示。
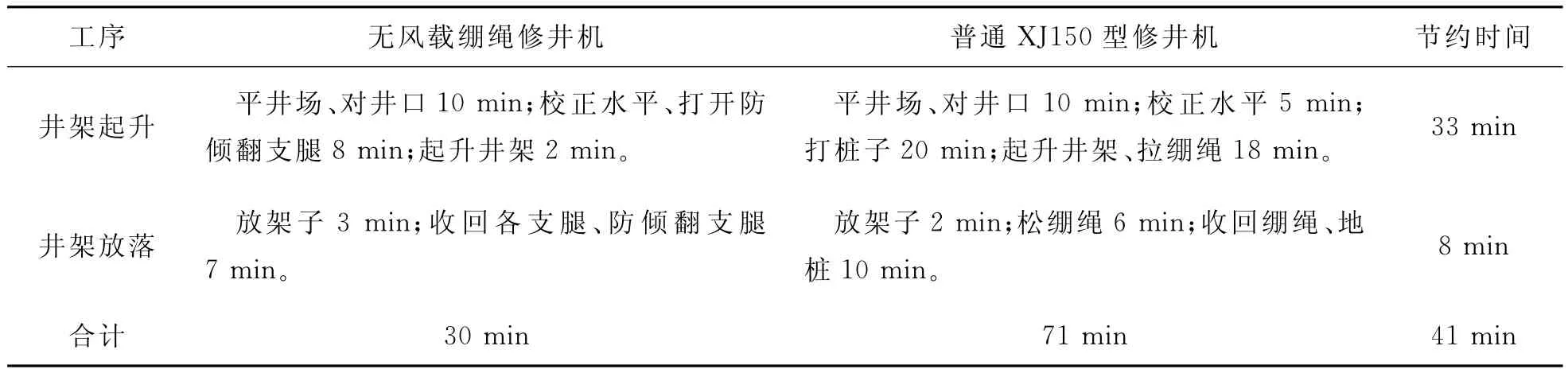
表3 無風載繃繩修井機作業時間對比
由表3可以看出:由于無風載繃繩修井機不需要打地錨樁和調節繃繩距離,相比普通同級別修井機,立放井架速度大幅加快,每口井可節約時間約41min,加快了施工進度,提高了作業效率,同時大幅降低了工人的勞動強度。
4.2 經濟效益分析
由于無風載繃繩修井機不需要調節繃繩距離和打地錨樁,相比普通同級別修井機,立放井架速度大幅加快,每口井可節約41min,在相同工況下每年可節約作業時間:41×270=11 070min=184.5h。
按照目前1 000m以內油、水井小修作業每口井平均作業時間在10h以內計算,每年可多施工18口井。
4.3 安全效果評價
1) 防傾翻裝置代替風載繃繩,經理論計算可承受12級大風井架不傾翻。
2) 采用電子防傾翻報警儀,實時顯示各支腿受力情況,及時自動報警,保證了設備平衡穩定。
3) 采用電子防碰裝置,當提升高度超過設定值時自動剎車,保證提升作業施工的安全性。
4) 安全照明采用防爆燈具,保證夜間照明及施工安全。
5 結語
無風載繃繩修井機在減少井場作業面積、降低使用者勞動強度、減少作業成本、提高作業效率方面具有較大的發展空間。目前,XJ150型無風載繃繩修井機已實現批量生產,并在新疆油田得到廣泛應用。
[1] 馬林昌.無繃繩修井機穩定性仿真分析[J].石油礦場機械,2011,40(9):53-56.
[2] 高學仕,李 鉞,戴 揚,等.修井機井架的結構優化設計[J].石油礦場機械,2002,31(4):12-15.
[3] 孫松堯,史懷忠,陳江榮,等.井架強度數值計算研究[J].石油礦場機械,2004,33(3):30-32.
[4] 梁會高,陳 俊.基于StruCAD-3D的旅大4-2海洋修井機井架設計計算[J].石油礦場機械,2006,35(5):67-70.
[5] 王峻喬,周思柱,李建平.基于StruCAD*3D的直立套裝自升井架計算分析[D].上海:中國科學院上海冶金研究所,2000.
[6] 宋嗣新.無繃繩修井機關鍵部件有限元分析及穩定性研究[D].長春:吉林大學,2007.
Development and Application of XJ150Workover Rig without Guy Rope
YANG Wen-xin1,CAO Li-ming2,WANG Jian-gang1,WANG Bin-hu1,LI Pei-jiang1
(1.Downhole Technique Company,Xinjiang Oilfield Company,Karamay834000,China;2.The Fourth Petroleum Machinery Factory,Jianghan Petroleum Administration Bureau,Jingzhou434000,China)
To meet the requirement of workover treatment in marshland,desert and well populated area and to accelerate the construction progress,a self-propelled workover rig without guy rope was designed.This text presents its working principle and key technology,the application effects is analysed statistically.Now the work over has been fully applied in Xinjiang Oilfield.
mast type mast;guy rope;workover rig
1001-3482(2012)03-0065-04
TE935
A
2011-09-28
楊文新(1961-),男,新疆克拉瑪依人,工程師,主要從事石油裝備管理工作,E-mail:fw3-wangjg@petrochina.com.cn。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
