低次曲面模型精度的研究
2012-12-11 06:06:46趙傳華黨亞民秘金鐘
測繪通報 2012年1期
關鍵詞:研究
趙傳華,黨亞民,秘金鐘
(1.山東科技大學,山東青島266510;2.中國測繪科學研究院,北京100830)
一、引 言
根據(jù)Dai和李的研究,用戶位置電離層改正信息的計算可理解為各獨立網絡基線上的電離層誤差信息的加權平均值。而采用不同改正模型的差別就在于基本公式中各內插系數(shù)或者各獨立基線所對應的權值不同,其通用計算公式為(Dai,2001;李成剛,2005)

式中,V是包含各基線所包含的系統(tǒng)誤差矢量,適用于電離層延遲誤差、對流層延遲誤差等距離相關誤差;a是各基線系統(tǒng)誤差矢量所對應的內插系數(shù)矢量。
為了建模或內插出虛擬參考站(VRS)網中與距離相關的空間誤差(如軌道誤差、對流層延遲和電離層延遲等),到目前為止,已經研究出了多種利用VRS網絡數(shù)據(jù)生成誤差改正數(shù)的方法。主要有線性組合法、基于距離的線性內插法、線性內插法、最小二乘配置法和低次曲面模型法,下面將對這些方法進行簡單地介紹。
二、算法模型
線性組合法由Han Shaowei在2000年提出的,它不僅可以削弱甚至可以消除空間相關誤差(如軌道誤差、對流層延遲和電離層延遲),還能有效地減弱多路徑效應及觀測噪聲的影響[1]。

距離相關內插算法主要基于參考站間距離對用戶站的電離層延遲進行建模。其數(shù)學模型為[2],分別為用戶流動站及各參考站相對于主參考站的雙差電離層延遲估值;n為參考站數(shù)量;ci為空間相關內插參數(shù),為參考站與用戶流動站之間距離d的倒數(shù),而
當VRS網中有3個或3個以上的基準站時,線性內插模型可用下式表示[3]
式中,ΔX和ΔY為各個基準站與主參考站的平面坐標值之差;a、b為ΔX和ΔY的系數(shù)。
最小二乘配置法(least-squares collocation,LSC)使用協(xié)方差陣信息將基準站的誤差值內插出虛擬參考站的誤差值。內插方程可表示為[4]

下面詳細介紹一下低次曲面模型法(LSM)。
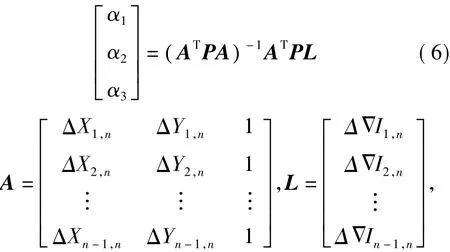
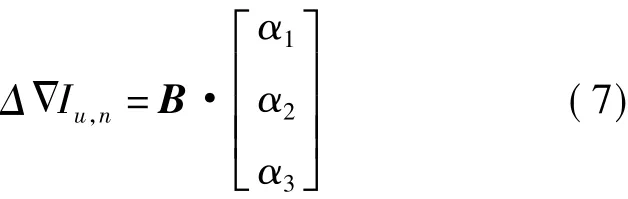
選定流動站周圍的n個參考站,設定第n個參考站為主參考站并選定同樣的衛(wèi)星對,在模糊度固定后,計算參考站間的雙差電離層延遲,再以低次曲面模型法作為區(qū)域內插模型計算流動站和主參考站之間的雙差電離層延遲,其具體數(shù)學模型如下[5]

當參與計算的參考站數(shù)目n≥3時可以求得改正數(shù)內插系數(shù)矢量的最小二乘解
三、算例分析
由于低次曲面模型可以很好地逼近和擬合網絡范圍內電離層延遲的空間相關性。因此,本文采用一種加權的低次曲面模型計算河北省CORS網區(qū)域內的電離層延遲殘差。本文選用其中的5條基線進行研究,采樣率為30 s(如圖1所示)。
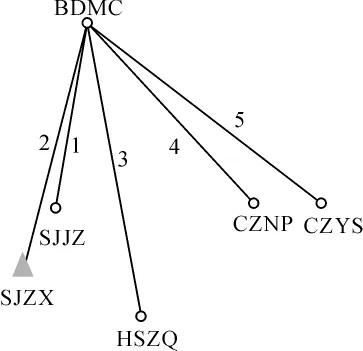
圖1 站點分布圖
圖1為選擇的 5 條基線,分別用 1、2、3、4、5 表示,用原始觀測數(shù)據(jù)計算得到雙差電離層延遲值(計算值),然后采用其中的幾條基線內插另一條基線的延遲值(估計值),即可計算出電離層延遲計算值和估計值的差值,從而驗證內插模型的精度。為研究內插精度與基線的關系,本文設計了如下4種方案。
方案1:用4條基線內插1條基線(用2、3、4、5號基線內插1號基線),內插殘差如圖2所示。
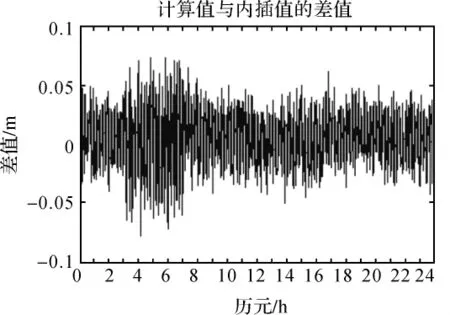
圖2 方案1的內插殘差
方案2:用3條基線內插1條基線(用2、3、4號基線內插1號基線),內插殘差如圖3所示。
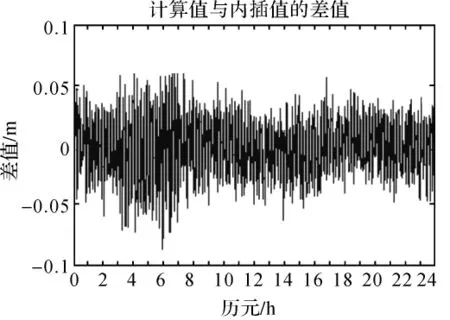
圖3 方案2的內插殘差
方案3:用3條基線內插1條基線(用2、3、5號基線內插1號基線),內插殘差如圖4所示。

圖4 方案3的內插殘差
方案4:用3條基線內插1條基線(用2、4、5號基線內插1號基線),內插殘差如圖5所示。
表1為4種方案的殘差均值和RMS值。比較方案1和方案2、3、4,方案1的內插結果最好,精度最高,可以看出用4條基線內插1條基線的精度要比用3條基線內插1條基線的精度要高。比較方案2、3、4可看出,方案2、3的內插精度相差不大,方案4的內插精度最低。方案3比方案2的精度稍低,可能是因為5號基線比4號基線長,本身基線的雙差電離層延遲就大,導致內插精度稍低;也可能是因為5號基線比4號基線離1號基線更遠,由于空間位置關系導致內插精度低;也可能是這兩方面原因起作用的緣故。方案4的內插精度最低,可能是4、5號基線離1號基線遠,由空間位置關系造成的。
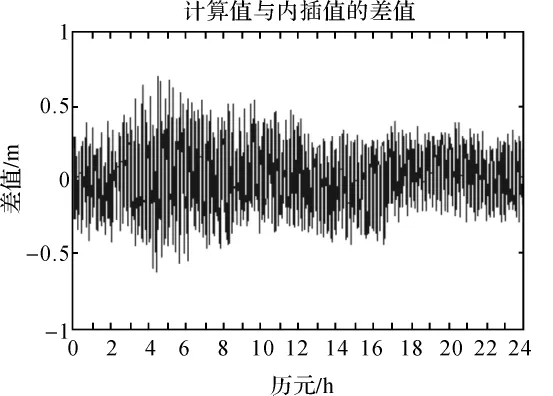
圖5 方案4的內插殘差
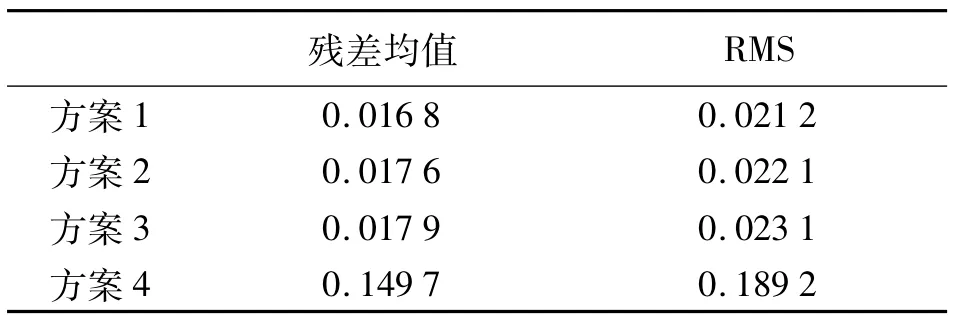
表1 4種方案的殘差均值和RMS值 m
由以上試驗可看出選擇合適的基線運用低次曲面模型進行內插可以達到較高的精度,驗證了該模型的可用性。基線條數(shù)、基線長度、基線間的空間位置關系各自對內插精度的影響將是下一步研究的重點。
四、結 論
本文重點介紹了低次曲面模型的方法和過程,并以實測數(shù)據(jù)驗證了該模型的內插精度,得出了以下結論:①用4條基線內插1條基線的精度要比用3條基線內插1條基線的精度高;②選擇合適的基線運用低次曲面模型進行內插可達到較高的精度;③內插精度可能與基線的長度和基線的空間位置關系都有聯(lián)系;④ 運用更多的數(shù)據(jù)進行試驗,驗證基線條數(shù)、基線長度、基線間的空間位置關系各自對內插精度的影響將是下一步研究的重點。
[1]張鋒.基于多參考站網絡的 VRS算法研究與實現(xiàn)[D].鄭州:信息工程大學,2007.[2]柏銘.QDCORS網的精度分析與完備性研究[D].青島:山東科技大學,2009.
[3]張成軍.虛擬參考站誤差分析與算法研究[D].鄭州:信息工程大學,2005.
[4]呂志偉.基于連續(xù)運行基準站的動態(tài)定位理論與方法研究[D].鄭州:信息工程大學.2010.
[5]周東衛(wèi).虛擬參考站_VRS_技術的質量控制和完備性監(jiān)測研究[D].四川:西南交通大學,2007.
[6]RAQUET.Development of a Method for Kinematic GPS Carrier-Phase Ambiguity Resolution Using Multiple Reference Receivers[D].Calgary:The University of Calgary,1998.
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
