
控制角自動定位整流控制器的設計
2012-12-17 10:48:42海洋石油工程股份有限公司王凱坡王愛武趙孟君
電子世界 2012年8期
海洋石油工程股份有限公司 王凱坡 王愛武 趙孟君
1.引言
大功率直流電源廣泛應用于冶金、化工及科研領域,大多采用大功率整流系統采用晶閘管整流。大功率晶閘管整流電路對觸發電路的要求[1]是:控制精度高,實時性好,對稱度高,穩定性強,觸發安全可靠。然而大功率整流裝置其輸出功率可達數兆瓦,電流達數千安。在這些場合,通常電磁干擾較強,電網畸變嚴重,工作環境惡劣,這就要求控制系統具有較高的可靠性。
本文采用單片機作為控制電路,可用軟件的方法產生觸發脈沖,并按一定的算法調節觸發角。由于單片機的晶振頻率可達12MHz,產生的觸發脈沖有很高的時間精度和嚴格的對稱性。而且單片機線路具有良好的人機界面,可以方便地改變工作方式及調節參數,使調節效果最佳。同時,對輸人輸出信號的采樣,可對裝置進行較完善的保護。
2.三相橋式全控整流電路對觸發脈沖的要求
本系統采用三相橋式全控整流電路作為整流電路,其原理圖如圖1所示,
三相橋式全控整流電路中,含兩個相鄰編號的晶閘管元件,其中一個晶閘管元件編號與整流回路編號相同;另一個則為前一號晶閘管元件。兩個元件的自然換相點相位差為p/3。為保證整流回路中兩個晶閘管同時得到脈沖,以形成電流通路。本系統采用雙窄脈沖方式實現上訴工作要求。
當采用雙窄脈沖觸發方式時,觸發脈沖的寬度τ>60°,一般取為80°-120°。因為相鄰編號的兩元件的自然換相點間時間間隔為60°,所以觸發某一號元件時,前一號元件的觸發脈沖尚未結束。這樣就可以保證各整流回路中兩個晶閘管元件同時具有觸發脈沖,并具有足夠的脈沖寬度。圖2所示為三相橋式全控整流電路雙窄脈沖觸發示意圖。圖2(a)為三相電源電壓波形及自然換相點;圖2(b)為6個晶閘管元件的觸發脈沖順序及兩組元件分別換相的順序;圖2(c)為采用雙窄脈沖觸發時的觸發脈沖。
3.控制系統設計
系統以80C196KC為核心控制,定時輸出觸發脈沖,能夠進行30°內的控制角自動定位,實現整流控制。30°控制角自動定位是本設計的一個重點,在稍候的章節中將專門敘述。
數字觸發器的基本結構如圖3所示。主要由同步信號形成,觸發角α的計算、移相及脈沖形成和分配,脈沖輸出及功率放大3個環節組成。首先將系統動態過程得瞬態信號經過A/D轉換,變成計算機能夠接收和處理的數字量,通過軟件對數字量進行處理,得到所要測試的控制角,通過控制α角大小,即可達到控制晶閘管觸發的時間,進而達到整流控制的目的。
1)CPU主電路:由80C196KC為主組成的CPU電路包括程序存儲器(EPROM)、總線及讀寫控制電路以及CPU的時鐘電路、復位電路等[2]。
2)同步信號電路:80C196KC的四個高速輸入/高速輸出復用口中的兩個用作輸出口后,就只剩下兩個高速輸入口可用來作同步信號檢測。用HSI.0響應同步信號電路的輸入中斷,得到系統的同步信號。
3)A/D采樣電路:80C196KC有內嵌的10位A/D轉換器,但10位的A/D轉換器的精度只有千分之一,不能滿足該系統的要求。所以,本系統采用外接的12位A/D轉換器。
4)鍵盤控制與顯示電路:為了進行人機對話,實現系統的在線控制,并將監測信號實時顯示出來,采用專用的8279接口芯片,配LED顯示器。需要改變一些設定值時,可以通過按鍵來實現。
5)隔離驅動電路:從80C196KC的高速輸出口輸出的六相脈沖需要經過隔離、放大后輸出才能驅 動晶閘管。
4.控制角30°內自動定位的方案
對于三相橋式全控整流電路而言。整流器輸出電壓由下式計算

式中Ud是整流器輸出電壓平均值;U2為整流變壓器二次測額定相電壓有效值;a從自然換相點算起的觸發脈沖控制角。
整流觸發電路中對觸發控制角a的精確的計算與控制相當重要。本系統為了得到穩定的輸出電流采用閉環控制的PID算法來計算觸發控制角a。這可以在一定范圍內得到所需要的觸發控制角a的值,并能基本上實現輸出電流的穩定。但閉環控制的PID算法只能抑制被反饋環包圍的前向通道上的擾動,而對反饋環以外的擾動卻無能為力。
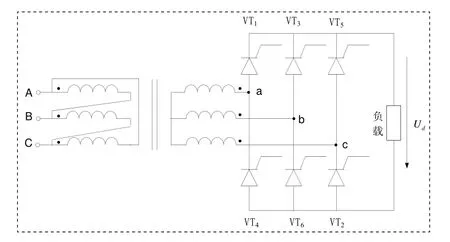
圖1 三相橋式全控整流電路原理圖
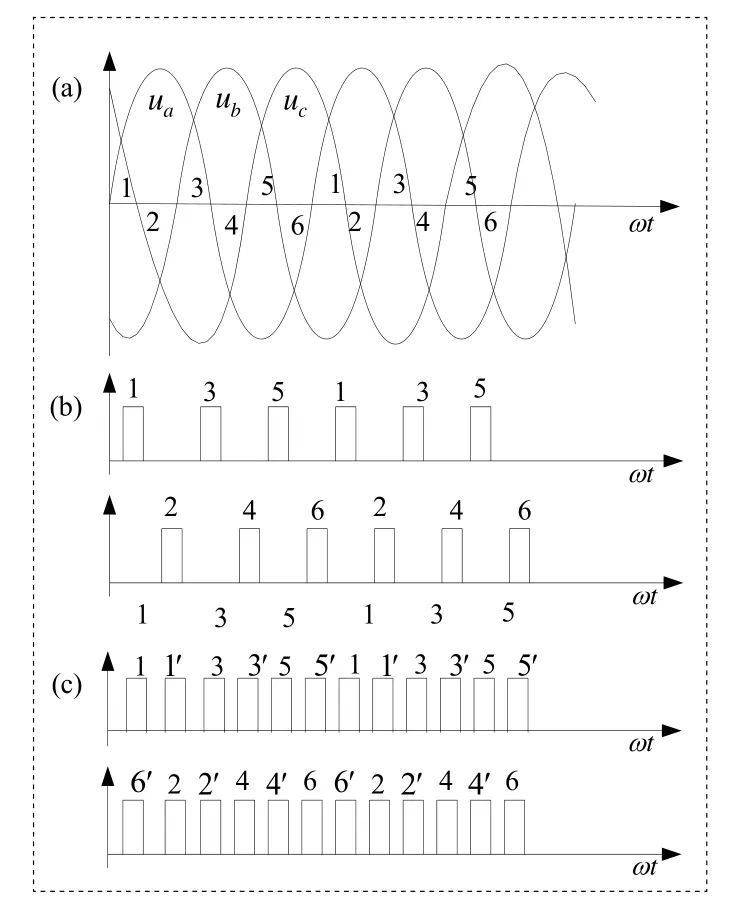
圖2 三相橋式全控整流電路雙窄脈沖觸發
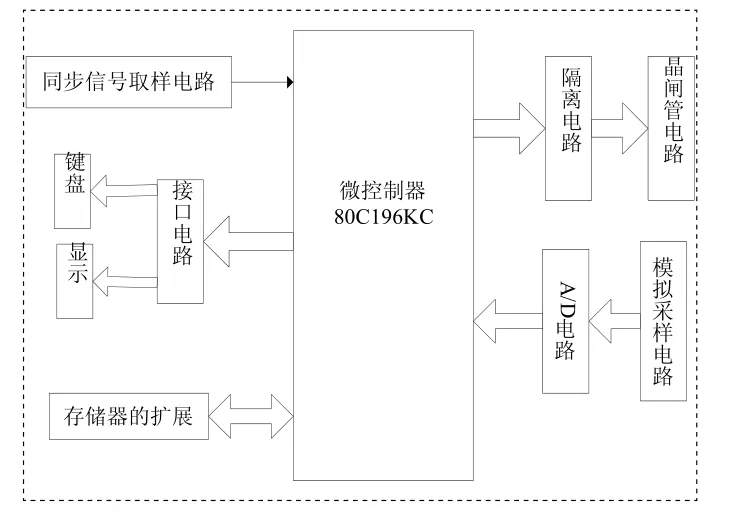
圖3 系統結構框圖
計算觸發控制角a的一個重要的前提就是要知道a=0時刻點所在(即基準點的確定)。本設計采用“準相對觸發”的方式來檢測同步信號,確定其自然換相點。同步認相相對精確可靠,但這樣所得到的自然換相點的位置往往會因為同步信號電壓的漂移而存在誤差。很明顯,同步信號電壓的漂移產生的擾動信號不在反饋環包圍的前向通道上,閉環系統不能抑制這一擾動。從而使觸發過程受到影響,嚴重時會導致觸發失敗,這對大功率整流系統來說是絕對不允許的。這就要求設計中要解決控制角定位問題,本設計要求實現控制角30°內自動定位。
4.1 解決方案
要直接得到同步電壓信號的漂移量比較困難,但我們可以由整流器輸出電壓平均值Ud,反推出觸發器實際給出的觸發控制角a。這樣得的觸發控制角a存在誤差,即包含了同步電壓信號的漂移量。此外,我們還可以PID算法[3]得以理想的自然換相的為基準的觸發控制角pα。
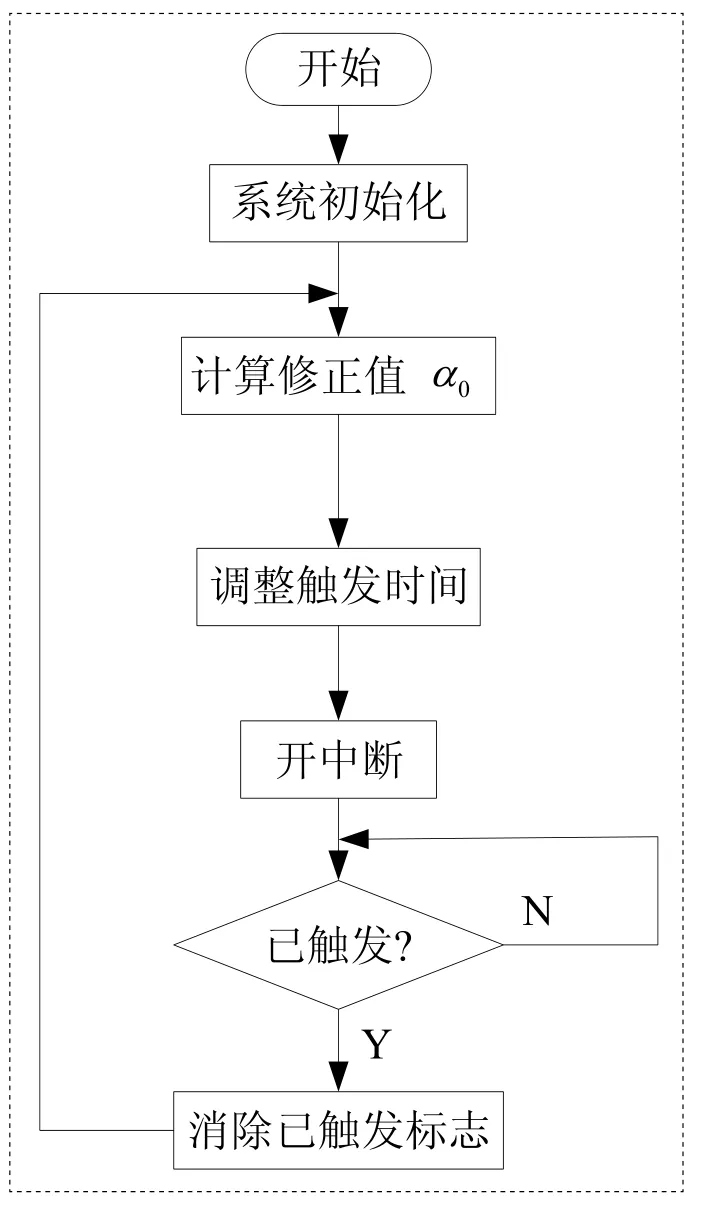
圖4 控制角自動定位程序框圖
則:
同步電壓信號的漂移量:

這樣就可以根據同步電壓信號的漂移量'α來調整觸發角實現控制角a自動定位。
實測值a可有整流裝置的輸出得平均電壓Ud與控制角a的關系反推得到。本設計的控制對象為三相橋式全控整流電路,其輸出得平均電壓Ud與控制角a的關系如公式(1)所示。U2是a相電壓有效值,在設計中它們的大小可以通過A/D采樣獲得。
由公式(1)可以得到a值的計算公式:

為了縮短占用CPU的時間,編制Ud,U2比值和控制角a之間的反余弦函數表。在實際制表的時候存儲的應是與a對應得定時器時間常數,即一個計數值,用拖延時間表示a值。
觸發控制角αp由給定值αp經PID運算得到,所以在這里簡稱為給定值。
4.2 控制角自動定位的具體實現
通過上面的計算我們可以得到同步電壓信號的漂移量 α'= α-α ,從而可以得
p到控制觸發角的修正值α0。

要想在一個周期內及時地對控制觸發角a的修正,控制系統的觸發脈沖能夠進行360°的移相。本設計用80C196KC的高速輸出口HSO輸出脈沖,它們獨立于CPU而工作,HSO口的輸出信號可以預先設置,可以方便地進行360°的移相。只要把0α轉化成計數值后寫入HSO的CAM中,就可以實現對觸發角的修正。
此外80C196KC有一種特殊的工作狀態—待機狀態,也為系統方案的實現提供了條件[4]。待機狀態是80C196系列產品的一種特殊的節電工作方式。在這種方式下,CPU停止工作,CPU時鐘被凍結在邏輯零狀態,但外設時鐘繼續工作。當中斷信號到來時,CPU退出待機工作方式,進入中斷服務程序。中斷服務程序的返回地址為鍵盤查詢,之后進入采樣程序模塊,這樣一來,就保證了在兩次同步信號之間進行一次采樣和控制角修正值0α的計算。
其流程圖如圖4。
5.結束語
本設計為控制角自動定位整流控制器的設計,控制對象為大功率整流電路。大功率整流電路,因為其工作條件相對惡劣,對整流控制器有更高的要求。所以本設計除了要要實現控制角自動定位,還要能適應其惡劣的工作條件。上述的所有設計都是圍繞這兩方面進行。該系統具有參數設定方便、硬件結構緊湊、體積小、調試方便、調速范圍廣、系統可靠性高、穩定性好、實時性強等特點,大大簡化硬件電路的組成,并可提高觸發器的控制精度。
[1]王兆安,黃俊.電力電子技術[M].北京:機械工業出版社,2004.
[2]吳云,戴文.基于Intel80C196KC單片機控制的晶閘管觸發器的設計[J].遼寧石油化工大學學報,2005,25(2):79-82.
[3]于海生,等.微型計算機控制技術[M].北京:清華大學出版社,1999.
[4]劉復華.8XC196KX單片機及其應用系統設計[M].北京:清化大學出版社社,2002.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
