一種基于STM32 的航模直升機飛控系統(tǒng)設計*
2012-12-22 05:57:18陳貽國錢金芳潘日敏
電子器件 2012年1期
陳貽國,錢金芳,潘日敏
(浙江師范大學數(shù)理信息與工程學院,浙江 金華321004)
直升機由其獨特的飛行性能在軍用和民用領域獲得了越來越廣泛的應用。小型無人直升機具有直升機和無人機的共同優(yōu)點,而且還有體積小,機動性強等特點。但由于小型無人直升機體積小,受氣流影響大等原因,導致其飛行控制系統(tǒng)的設計面臨著很多挑戰(zhàn)。主要表現(xiàn)在以下幾方面[1]。
(1)直升機本身和它的飛行動力學模型具有很強的非線性特點;
(2)直升機的運動量之間存在著嚴重的耦合;
(3)直升機的自穩(wěn)定性不足,飛行狀態(tài)在很多情況下是不穩(wěn)定的;
(4)直升機易受外界氣動環(huán)境的干擾;
(5)直升機存在著多種飛行模態(tài),不同的飛行模態(tài)下控制規(guī)律存在差異。
本文就上述直升機存在的問題,提出了一種基于多傳感器和自適應PID 控制策略的飛行控制系統(tǒng)的設計方法。并設計了基于STM32 微控制器的飛控電子設備和基于主從模式的地面控制軟件,通過在型號為TREX450SE 的直升機航模上進行飛行實驗,實現(xiàn)了懸停和低速狀態(tài)下的自主飛行。
1 飛行控制系統(tǒng)的硬件設計
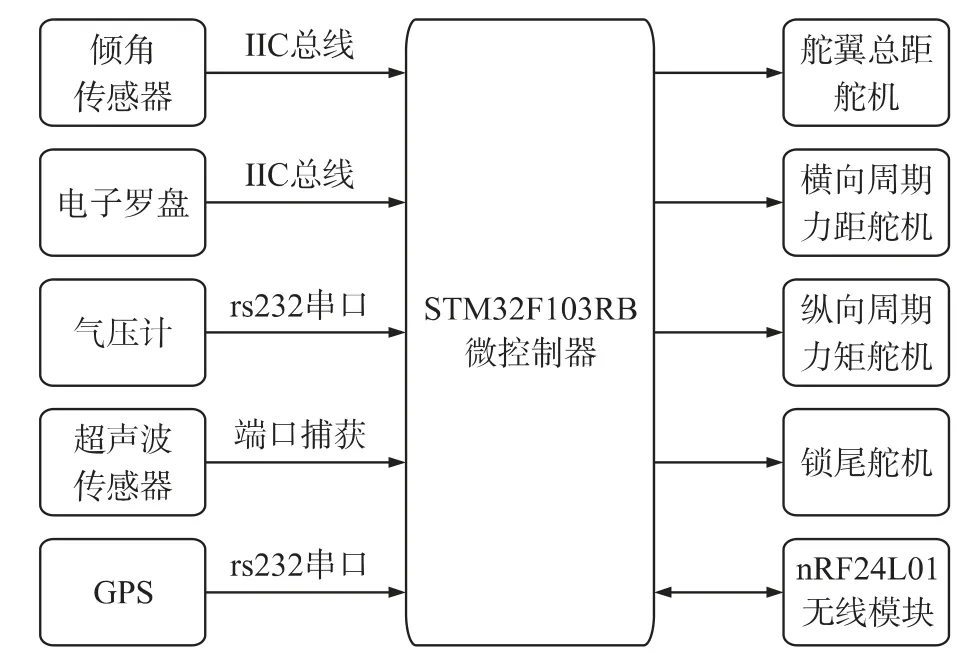
圖1 飛行控制硬件系統(tǒng)機載部分示意圖
飛行控制系統(tǒng)采用如圖1 所示的硬件系統(tǒng)。采用了基于RAM 內核的STM32F103RB 微控制器,該控制器具有128 kbit 的Flash 存儲器和64 kbyte 的數(shù)據(jù)存儲器,有串口,IIC 總線等豐富的外設資源[2]。采用了LM7805 等三端集成穩(wěn)壓芯片為系統(tǒng)提供5 V 和3.3 V 的直流電源,系統(tǒng)分為機載部分和地面控制部分,兩部分通過nRF905-33E 無線通信模塊進行數(shù)據(jù)交換,可以實現(xiàn)空曠區(qū)3 km 范圍內的可靠通信。
機載部分采用了三軸電子羅盤HMC5883L 和三軸加速度傳感器ADXL345 組成飛行姿態(tài)測量系統(tǒng)。電子羅盤和加速度傳感器采用的是IIC 總線方式與微控制器相連,微控制器通過訪問不同的服務地址實現(xiàn)對不同傳感器的數(shù)據(jù)通信和控制。由芯片的數(shù)據(jù)手冊可得電子羅盤的服務地址為0x3c,加速度傳感器的服務地址為0xa6。HMC5883L 電子羅盤采用的是霍尼韋爾各向異性磁阻技術,因而具有在軸向高靈敏度和線性精度高的特點,羅盤的航向精度可達到1°。采用了超聲波和數(shù)字氣壓計MS5540-CM 兩個傳感器來對航模的飛行高度進行精確的測量,由于氣壓計測量的是距離海平面的絕對高度,與航模的實際距地面的飛行高度有一定的差距,而且測量的精度有限[3],因而系統(tǒng)采用了超聲波測距模塊,該模塊可以在2cm 到3m 范圍內精確測量出航模距地面的實際距離。導航系統(tǒng)則采用了GPS模塊,該模塊通過RS232 串口與微控制器相連。
對于地面基站部分則采用了STM32F103RB 微控制器和nRF24L01 組成,微控制器通過USB 口直接和上位機相連。
2 飛行控制數(shù)學模型辨識
絕大部分的直升機航模都是通過自動傾斜器來實現(xiàn)對主旋翼的橫向周期變距、縱向周期變距、總變距的控制的。首先需要知道控制自動傾斜器的三個舵機的操縱量與總距、橫向周期變距、縱向周期變距之間的關系。
對于控制主旋翼的傾斜器的三個舵機的操縱量δ1、δ2、δ3舵機作用點與周期變距角φ1、φ2,主旋翼的總距角φz的關系如圖2 所示,其中在TREX450SE直升機航模中φ1=φ2=30°,而舵機3 與傾斜器的鏈接點與Y 軸重合。
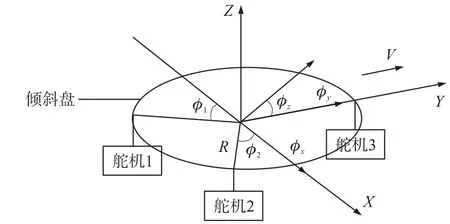
圖2 航模直升機主旋翼與總距角關系示意圖
圖2中,R 為舵機作用點到傾斜器中心的距離,φ1為舵機1 作用點與傾斜器X 軸夾角,φ2為舵機2作用點與傾斜器X 軸夾角,φx為橫向周期變距角,φy為縱向周期變距角,φz為總距角,V 為航模飛行方向。
若不考慮機械結構的彈性和慣性以及操作過程中的動態(tài)響應,僅從運動的幾何關系考慮,在主旋翼的總距角為φz時,當三個舵機的操縱量分別為δ1、δ2、δ3,主旋翼的軸距角變化為φ0,則由圖中可知舵機位移與槳距的關系如式(1):
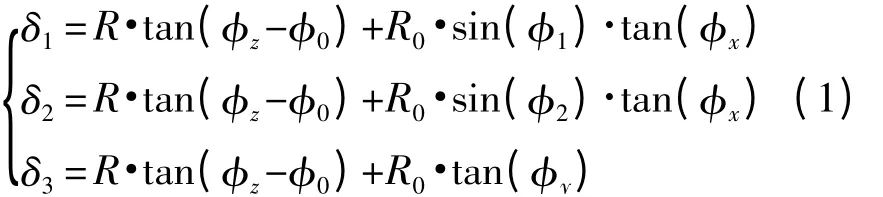
可以認為當變化量很小,即φ0很小時,當直升機平穩(wěn)飛行時φx,φy,φz都很小[5],則由式(1)可得式(2)。
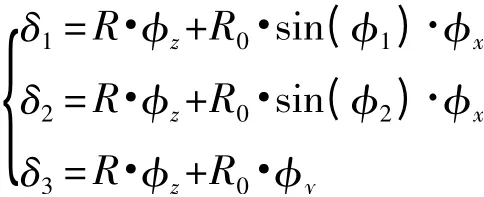
即
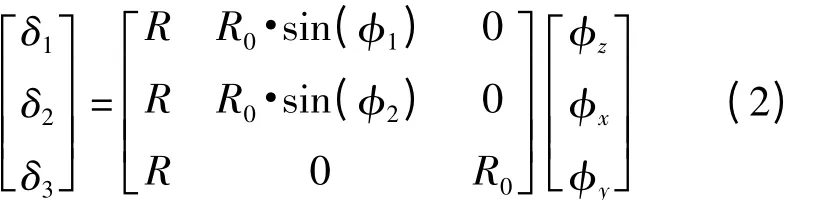
上式體現(xiàn)了舵機的位移與直升機航模操縱量——總距、橫向周期變距、縱向周期變距之間的關系。依據(jù)式(2),可以得出操縱控制需要的舵機位移量和需要轉動的角度。
由于直升機航模飛行的動力學模型呈非線性特點,而且實際航模的飛行平衡方程是一個多階的非線性方程組[4]。求解相對復雜,可以采用以下簡化的方程組來近似估算航模飛行的配平值。假設航模飛行在懸停的飛行狀態(tài)下,并且航模的姿態(tài)角都是小角度變化,認為姿態(tài)角的正弦值為其本身,則直升機航模懸停時的平衡方程可以簡化為式(3)[6]。具體參數(shù)定義可見參考文獻[6]。
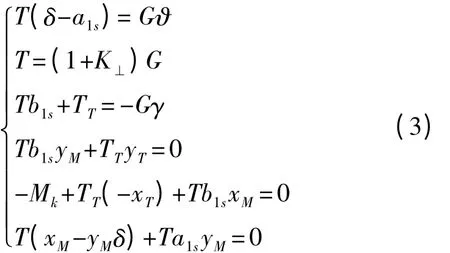
由上式可得航模機懸停時的配平部分結果如表1。
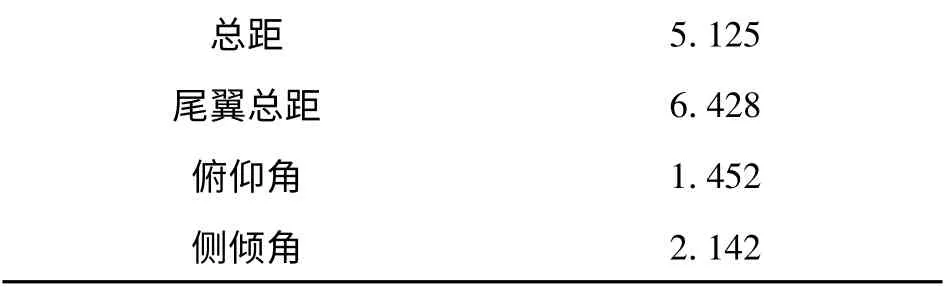
表1 航模機懸停時的配平部分結果 單位:(°)
3 自適應PID 控制策略設計
自適應PID 控制策略指的是在傳統(tǒng)的PID 控制策略上添加了與系統(tǒng)模態(tài)相關的控制量,同時為了滿足系統(tǒng)控制門限的要求,在PID 的輸出端增加了控制的門限區(qū)[6]。系統(tǒng)的自適應PID 控制策略采用的是增量式PID,增量式PID 只是控制輸出的增量,與位置式PID 相比能有效地減小微控制器誤動作造成的影響。自適應增量式PID 的參數(shù)運算方程如下[7]。

其中P、I、D 分別為比例項、積分項和微分項的控制參數(shù),當其為0 時表示該參數(shù)項不起作用。KP為比例項系數(shù),K 為積分項系數(shù),KD為微分項系數(shù)。Δe 為輸入偏差量、Δel為上一次輸入偏差量,Δep為上上次輸入偏差量。為減少控制的振蕩,系統(tǒng)設定了一個偏差量的不靈敏度門限,即當輸入的偏差量小于該門限值時則不進行PID 控制。同時傳感器的測量值通常會在一個小范圍內波動,增加不靈敏度門限有利于減少這種波動所帶來的操縱誤動作。
4 懸停和低速飛行狀態(tài)下的操縱控制
對于TREX450SE 直升機航模,共有4 個控制舵機,分別用于控制自動傾斜器和尾翼的槳距。由于直升機航模運動量之間存在著嚴重的耦合,對其中某一個操縱量進行控制的同時需要考慮到該操縱控制對其它操縱量的影響。例如自動傾斜器是由三個舵機進行控制的,由式(2)可以看到舵機的操縱量δ1、δ2、δ3與周期變距角、總距角存在著較嚴重的耦合關系,即單獨控制舵機的操縱量會同時影響到周期變距和總距。因而必須對三個舵機同時進行控制以避免這種耦合關系所帶來的影響。
4.1 飛行姿態(tài)的控制
主旋翼是單旋翼帶尾翼式直升機的主要操縱面,也是航模姿態(tài)控制中的主要控制對象。對主旋翼的控制是航模姿態(tài)控制的重點。對主旋翼的控制其實就是對自動傾斜器的控制。本系統(tǒng)設計如圖3所示的閉環(huán)控制。
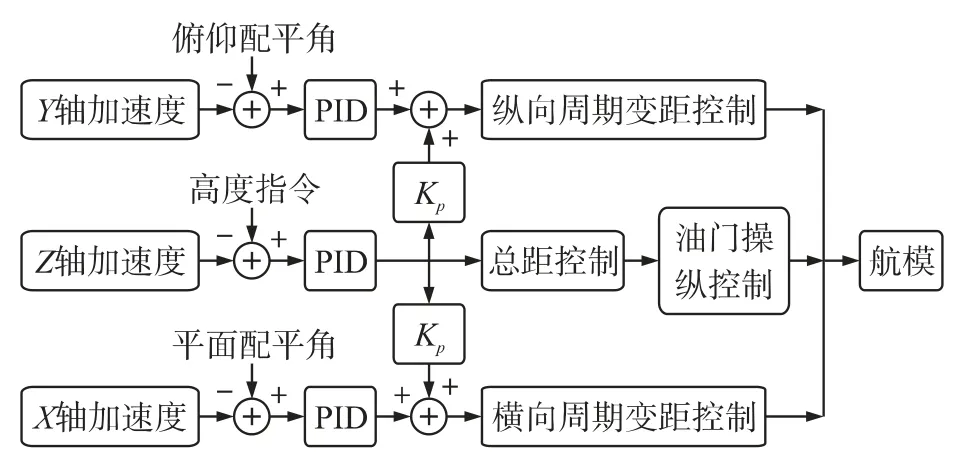
圖3 主旋翼控制原理示意圖
主旋翼的控制包括橫向周期變距的控制,縱向周期變距的控制和總距的控制。
首先由微控制器讀取加速度傳感器ADXL345 的測量的航模的飛行姿態(tài)數(shù)據(jù),該數(shù)據(jù)為航模的橫向傾斜角和縱向傾斜角,首先將數(shù)據(jù)進行濾波,將濾波后的數(shù)據(jù)與設定的航模懸停配平值進行求差,得到角度的偏差,再通過自適應PID 控制算法求得控制的增量,通過操縱量與周期變距和總距的關系式(2)可得到每個舵機的操縱偏差量,將得到的操縱偏差量疊加到原先的控制量控制舵機的偏轉角度,進而達到調整航模飛行姿態(tài)的目的。
總距的控制,航模主旋翼的總距的增加不僅會上升力增加,同時也會增加電機的負載,單獨的增加旋翼總距而不提高電機的輸出功率,則會造成功率不匹配。因而要航模保持平衡就必須在增加總距的同時,增加電機的輸出功率,也即需要增加油門操縱。
4.2 航向的控制
尾翼的作用主要是產(chǎn)生航模飛行的側力,從而形成偏航力矩,用以配平旋翼反扭矩并實施航向操縱,以實現(xiàn)對航模進行航向控制。系統(tǒng)設計了如下的一個基于HMC5883L 電子羅盤傳感器的尾翼控制閉環(huán)控制。
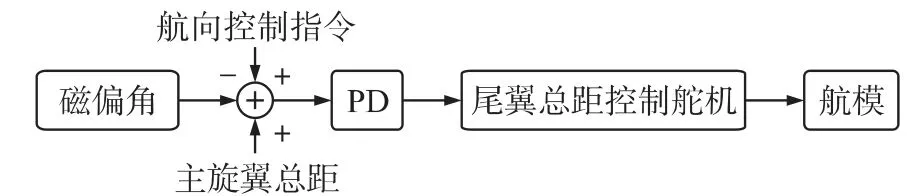
圖4 尾翼控制原理示意圖
5 飛控系統(tǒng)軟件設計
飛行控制軟件系統(tǒng)采用了模塊化設計的思路,將系統(tǒng)分為數(shù)據(jù)采集模塊、軌跡控制模塊、飛行控制計算模塊、舵機控制模塊等四個主要模塊。在數(shù)據(jù)采集模塊中進行三軸傾角、磁偏角、GPS、飛行高度等數(shù)據(jù)采集工作。軌跡控制模塊中應用數(shù)據(jù)采集模塊得到的飛行狀態(tài)數(shù)據(jù)和地面控制指令計算出飛行高度指令和航向控制指令。而在飛行控制計算模塊中,則通過姿態(tài)控制算子和航向控制算子計算航模四個舵機的控制量。舵機控制模塊則根據(jù)每個舵機的控制量來改變PWM 波發(fā)生模塊的相應PWM 波的占空比,從而實現(xiàn)舵機轉角控制。
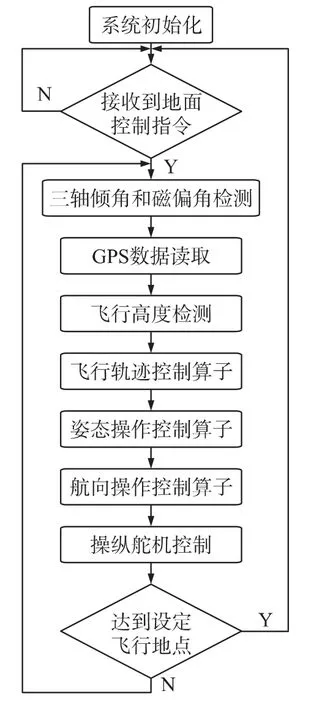
圖5 飛控系統(tǒng)軟件流程圖
6 飛行仿真驗證及飛行試驗
飛行控制系統(tǒng)的仿真應用了MatLab 軟件[12]將多次飛行試驗得到的數(shù)據(jù)進行分析、建模[7-11]并在此基礎上對PID 控制系統(tǒng)的參數(shù)進行整定,最終得到較為理想的控制參數(shù)。
圖6 給出了航模控制系統(tǒng)對高度控制指令的跟隨響應,可以看到航模高度控制具有一定的延時性和較強的跟隨性[7],同時可以看到其在逼近指定高度時有一定的過沖和振蕩,但在隨后的過程中能很快的保持穩(wěn)定。
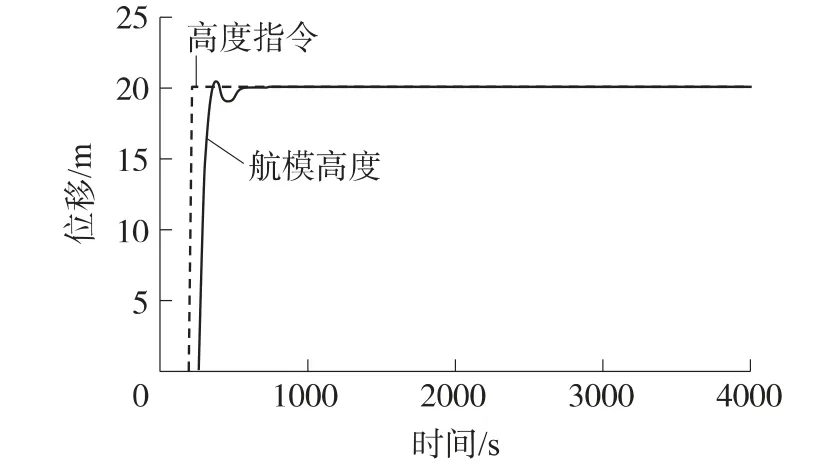
圖6 航模飛行定高飛行仿真圖
圖7給出了尾翼總距隨著油門舵機的輸出量的增加所產(chǎn)生的響應,從該圖可以看出尾翼總距隨著電機輸出功率的增加而增大,符合航模在上升時旋翼反扭矩增大的規(guī)律[6]。
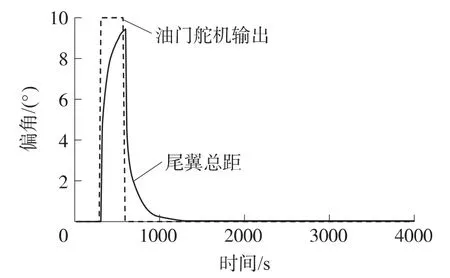
圖7 尾翼控制方波信號響應圖
圖8給出了航模在起飛時,橫向側傾角,俯仰角、旋翼總距隨著航模的抖動時發(fā)生的變化,可以看到系統(tǒng)對抖動噪聲有較強的擬制作用,同時可以看到旋翼總距在一個小角度內發(fā)生變化,只是在橫向側傾角和縱向俯仰角同時增大時增大,說明旋翼總距只有在航模加速或減速時才會發(fā)生變化,降低了橫向側傾角、俯仰角和旋翼總距之間耦合所產(chǎn)生的影響,符合實際控制的要求。
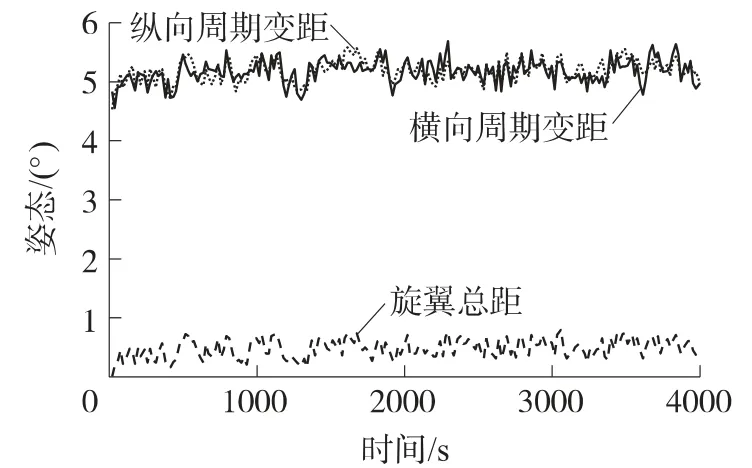
圖8 橫縱向側傾角與旋翼總距試飛數(shù)據(jù)圖
7 結束語
經(jīng)過多次實際飛行測試表明該小型自主飛行的航模機控制系統(tǒng)可以實現(xiàn)懸停飛行和定點飛行。在精度要求不高的情況下,可以完成一些特定的任務。但由于本系統(tǒng)受傳感器特別是加速度傳感器的精度影響較大,很難做到高精度的飛行。因而下一步的研究重點是提高數(shù)據(jù)濾波器的濾波特性和優(yōu)化控制算法,同時在硬件上采用精度更高的加速度傳感器,以實現(xiàn)更高精度的定點自動控制飛行。
[1] 施建昌.小型無人直升飛機飛行控制電路設計[D]:[碩士學位論文].北京:北京交通大學,2008.6.1-2.
[2] 王永虹,徐煒,郝立平.STM32 系列ARM Cortex-M3 微控制器原理與實踐[M].北京:北京航空航天大學出版社,2008:11-25.
[3] 家裕,裴海龍. 一種小型無人機高度定位方法的研究與實現(xiàn)[J].天津:自動化與儀表,2010,12:1-6.
[4] 宋寶泉. 小型無人直升機非線性建模與控制算法研究[D]:[博士學位論文].長沙:國防科技大學,2010,4:13-40.
[5] 張鵬.基于VxWorks 的無人直升機操縱控制系統(tǒng)設計與實現(xiàn)[D]:[碩士學位論文].南京:南京航空航天大學,2007,6:26-27.
[6] 高正,陳仁良. 直升機飛行動力學[M]. 北京:科學出版社,2003:65-69.
[7] 劉金琨.先進PID 控制MATLAB 仿真[M]. 北京:電子工業(yè)出版社,2004:1-27.
[8] 戴寧,司云玲.基于MATLAB 的直升機飛行控制系統(tǒng)建模與仿真[J].系統(tǒng)仿真學報,2005,10:240-242.
[9] 王洋,張京娟.基于自適應控制器的無人機飛行控制系統(tǒng)研究[J].彈箭與制導學報,2009,9:17-18.
[10] 李宜達. 控制系統(tǒng)設計與仿真[M]. 北京:清華大學出版社,2004:268-291.
[11] Stingu E,Lewis F L.A Hard Ware Platform for Research in Helicopter UAV Control[J].Journal of Intelligent & Robotic Systems,2009,54(1-3):387-406.
[12] 劉為國.MATLAB 程序設計教程[M]. 北京:中國水利水電出版社,2004:99-129.
