高超聲速飛行器多約束多種機動突防模式彈道規劃
2012-12-25 08:47:40張科南陳萬春
彈道學報 2012年3期
關鍵詞:優化
張科南,周 浩,陳萬春
(北京航空航天大學 宇航學院,北京100191)
近年來,隨著反導技術的不斷進步,機動突防設計成為現代導彈總體設計過程中必不可少的一環.國內外涌現出了許多關于彈道導彈、反艦導彈機動突防技術的研究成果[1~3].這些成果通常集中于研究導彈飛行過程中的某段(如彈道導彈的中段,反艦導彈末端),對該段導彈機動突防制導律進行設計,獲得制導律的最優解.
高超聲速飛行器具有飛行速度快、射程遠和突防能力強等優點.目前,關于高超聲速飛行器機動突防模式的成果還很少,本文旨在探討研究突防技術在這一全新領域的應用.高超聲速飛行器因其自身的特點,采用彈道導彈、反艦導彈等傳統的機動突防技術效果未必會好.鑒于其速度快、射程遠的特點,本文提出了進行大空域機動甚至全程機動的策略.根據飛行任務中的航路點和禁飛區分布[4,5],以及禁飛區類型不同,設計了多種機動突防模式:單S機動、半圓機動、橫向蛇形機動、滑翔跳躍機動、縱向蛇形機動.不同機動突防模式的設計問題可以看作是有特定約束要求的彈道優化問題.本文受文獻[6]中關于再入機動彈道工程設計法的啟發,結合擬平衡滑翔飛行的特點,提出了一種簡便易行的直接法優化策略[7],用來求解彈道優化問題.優化過程中,不但考慮了終端條件約束和熱流、動壓、過載等過程約束,而且加入了航路點和禁飛區的限制.為便于工程實現,還限制了控制變量的變化幅度及變化率.在文獻[8]基礎上,提出了改進的擬平衡滑翔條件(Improved Quasi-Equilibrium Glide Condition,IQEGC),建立了攻角和傾側角間一種約束關系,減少了一個控制變量,從而提高了計算速度;而且能夠保證彈道的平緩以滿足熱流、動壓、過載等過程約束.
1 研究對象和動力學方程
本文采用國外公開的通用航空飛行器(Common Aero Vehicle,CAV)中的高升力體CAV-H為研究對象,完整的氣動參數和結構參數參考文獻[9]的附錄.采用1976美國國家標準大氣模型.
本文設計的是CAV的滑翔段彈道.初始條件為主動段結束后,經過一定變軌,滿足起滑點要求的條件.終端條件為滿足下壓段交班要求的條件.
假設地球為球體,不考慮地球自轉的影響,三自由度質點動力學方程為
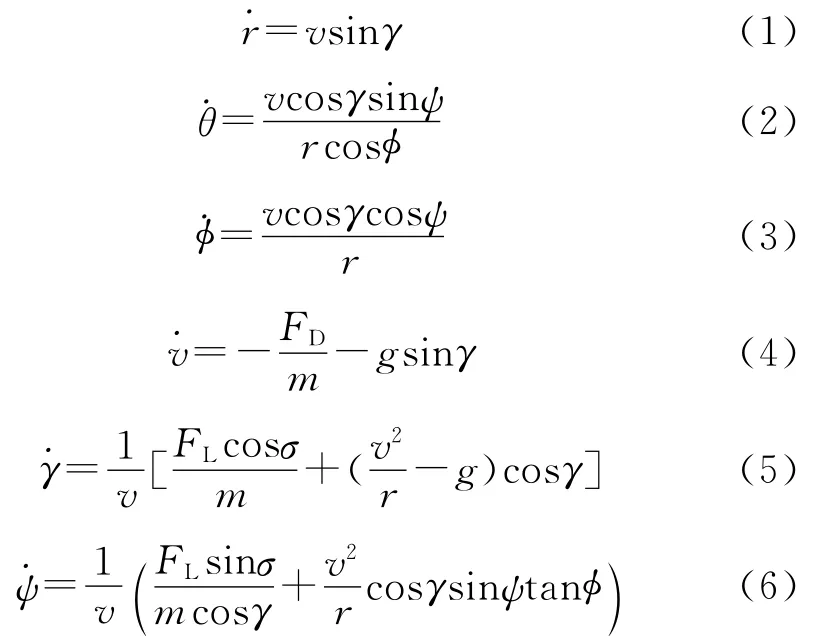
式中:r為地心到飛行器質心的距離;θ,φ分別為經度和緯度;v為對地速度;FD,FL為阻力和升力,即FD=ρv2SrefCD/2,FL=ρv2SrefCL/2,其中,Sref為飛行器氣動參考面積,CD,CL分別為阻力系數和升力系數;γ,σ,ψ分別為當地航跡角、傾側角和航向角.
2 約束條件
本文考慮了復雜的約束條件,包括控制約束、邊界條件和各種過程約束:熱流、過載、動壓、航路點和禁飛區等.
2.1 控制約束
CAV的2個控制變量為傾側角σ和攻角α.為了保證飛行器的飛行穩定,設定傾側角的變化極限是±50°,攻角范圍5°~20°,另外,對控制量變化率也進行約束,要求傾側角變化率不超過10(°)/s,攻角變化率不超過5(°)/s.
2.2 邊界條件
為滿足起滑點要求,初始條件設為高度h0=60km,速度v0=7km/s,彈道傾角γ0=0°,彈道偏角ψ0=90°.終端約束條件包括目標點的位置和指定的高度、速度限制等.為了滿足下壓段的交班條件,規定滑翔段末端的速度為2 km/s左右,高度為30~40km.
2.3 熱流約束

2.4 過載約束

式(8)左邊為飛行器受到的法向氣動過載,右邊為飛行器可以承受的最大過載,取nT,max=2.5g,g為當地的重力加速度.
2.5 動壓約束

式中,ρ為大氣密度;qmax為飛行器可以承受的最大動壓值,取qmax=60kPa.
2.6 航路點約束
航路點是指飛行器在飛行途中必須經過的一些位置點,進行導航信息確認、偵查拍照或者投遞物品等.設第i個航路點的位置(xi,yi),對飛行器要求在某一時刻ti,須有

2.7 禁飛區約束
禁飛區主要指預警雷達掃描區或其他防御系統的保護區域等.本文將禁飛區分為2類,可以避讓的禁飛區和無法避讓的禁飛區.可避讓禁飛區可以簡化為無限高圓柱體型和有限高半球型.前者對應預警雷達掃描范圍,要想避讓該區域,只能從掃描雷達的盲區飛行;后者對應有射程和射高限制的反導系統作用區域,例如美國的愛國者系統,由于其反導導彈的射高受限制,也可以從該區域的上面飛過.對可避讓的禁飛區,要保證飛行過程中飛行器距離禁飛區中心在安全范圍以內,即

第j個禁飛區的半徑為Rj,中心坐標(xj,yj);飛行器到禁飛區中心的距離,x方向上Δxj=xxj,y方向上Δyj=y-yj.
第二類為無法避讓的禁飛區,如果目標位于禁飛區的中心,則無論如何都是沒辦法避讓的,這時需要通過一定的機動,改變彈道形狀,加大防御系統的攔截難度.
3 擬平衡滑翔條件
升力體飛行器的大部分再入彈道,彈道傾角γ通常很小,并且變化相對較慢.在式(5)中,令cosγ=1,=0,得:

這就是擬平衡滑翔條件QEGC.理論上,只要升力足夠,式(12)就可以保證彈道絕對平直.但實際上,隨著飛行時間變長,速度越來越小,由于攻角有上限制約,飛行器獲得的升力不能滿足式(12)時,<0,彈道傾角γ會出現一個快速的下滑,不利于飛行器的穩定控制.本文對式(12)進行了一定的修正,給出改進的擬平衡滑翔條件(Improved Quasi-Equilibrium Glide Condition,IQEGC):

式中,ε是絕對值很小的負數,用來使彈道傾角γ很緩慢地變小,避免出現γ的快速下滑,保證飛行器的穩定.另外,ε可以作為一個優化變量參與彈道設計,通過設計ε,可以得到滿足指定終端條件要求的彈道.
由于FL=ρv2SrefCL/2,而CL是攻角α的函數,可見,QEGC提供了2個控制量傾側角σ和攻角α的約束關系.若已知σ可以用σ來表示α,反之亦然.這個關系式用在優化過程中可以減少優化變量,提高優化效率.
4 最優控制問題的求解
根據參數化方法的不同,求解最優控制問題的直接法分為2種基本類型[10]:①離散控制變量,將連續空間的控制變量參數化,狀態變量由數值積分獲得;②同時離散控制變量和狀態變量,通過若干數學變換將連續動力學微分方程轉換為代數方程.本文提出的方法屬于第一類直接法.由于飛行器按照QEGC飛行,選取傾側角作為獨立優化變量,攻角可根據式(13)得到,反之亦然.按照航路點和禁飛區的分布,以及禁飛區類型的不同,將傾側角或攻角離散為分段常值函數,段數的多少根據機動突防模式決定.取每一段的幅值和持續時間作為離散后的優化變量,然后利用序列二次規劃(Sequential Quadratic Programming,SQP)方法進行求解.例如,如果要躲避一個禁飛區并返回射面,只需要將傾側角分為兩段,兩段的傾側角符號相反.選擇每段的傾側角幅值和持續時間作為優化變量即可.離散后的傾側角為

5 多機動突防模式彈道設計
不同的作戰任務,對應不同的機動彈道.本文主要根據不同航路點和禁飛區的分布,以及禁飛區類型的不同,設計相應的機動彈道.其中航路點是必須經過的位置點.禁飛區分為可避讓和不可避讓2種情況.故文中將機動彈道分為橫向機動方式和縱向機動方式.
為了便于說明問題,不失一般性,假設CAV的初始位置經緯度為(0°,0°),目標位于赤道平面內.CAV和目標之間存在若干禁飛區和航路點.
5.1 橫向機動方式
5.1.1 單S機動
假設在飛行器和目標點中間存在2個半徑為400km的禁飛區,中心分別位于經緯度(40°,0°)和(70°,0°)處.其余約束條件如第3節所述.由于2個危險區間隔較遠,飛行器可以從2個危險區中間穿過擊中目標.假設目標位于赤道平面,經度未指定.以縱程最大作為優化目標函數,將傾側角σ離散為三段常值函數,相鄰兩段符號相反,以每段的幅值和持續時間為優化變量.考慮傾側角變化率的約束,設定傾側角從一段常值轉換到另一段常值的過渡時間tf=10s,這樣可以保證傾側角的變化率不超過10(°)/s.離散后的傾側角為
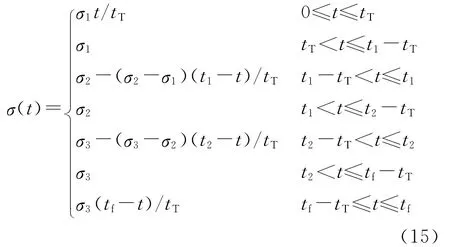
式中,σ1,σ2,σ3是常數,表示每一段上傾側角的幅值,相鄰2個符號相反.因為攻角的變化范圍比傾側角小得多,故只要傾側角滿足了變化率約束,攻角自然也滿足.
將σ1,σ2,σ3,t1,t2,tf作為優化變量,利用 SQP方法求解轉換后的非線性規劃問題,結果如圖1~圖3所示.
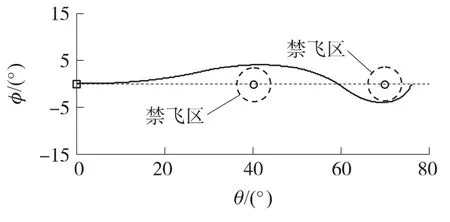
圖1 單S機動軌跡地面投影
從圖1可以看出,優化得到的軌跡成功地避開禁飛區擊中目標.從圖2中的速度和高度曲線可以看出,軌跡滿足終端約束條件.圖3中控制變量傾側角σ和攻角α的變化都在控制邊界內.σ變號過程,σ的絕對值先變小后變大,故根據QEGC決定的攻角α也伴隨出現先小后大的一種現象,反映在圖3中,每次傾側角σ變號,攻角α出現一個向下的小跳躍.同理可解釋圖2中彈道傾角γ小跳躍.傾側角σ變號以后,其幅值往往也發生變化,對應的攻角α也會出現比較明顯的變化.圖4顯示機動彈道始終位于飛行走廊內部,即駐點熱流、法向過載和動壓都滿足約束要求,這是按照QEGC飛行的優點之一.
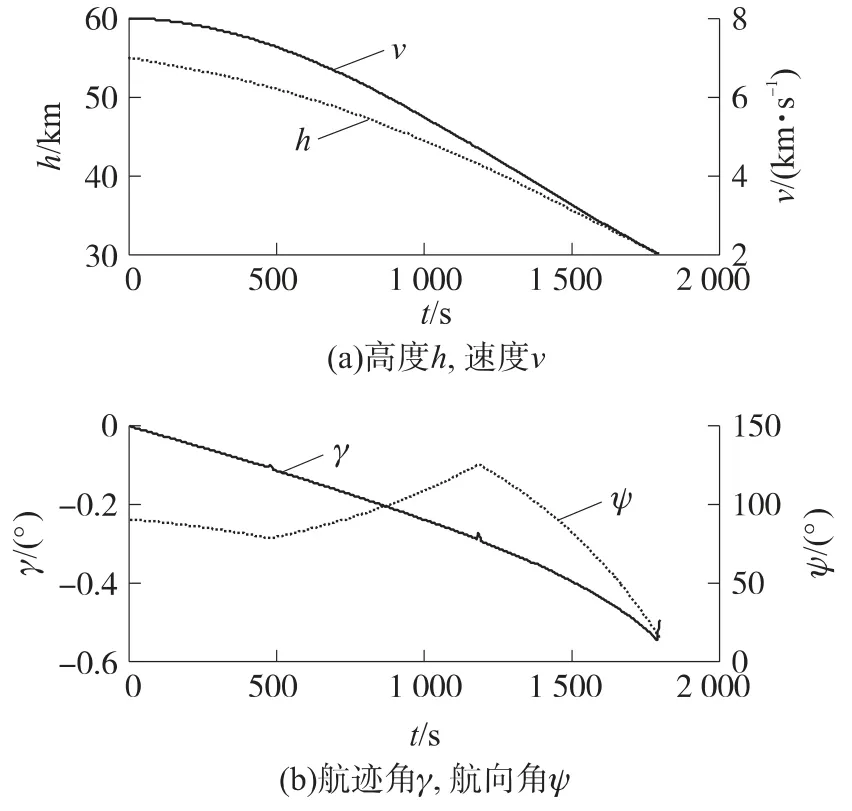
圖2 單S機動狀態變量
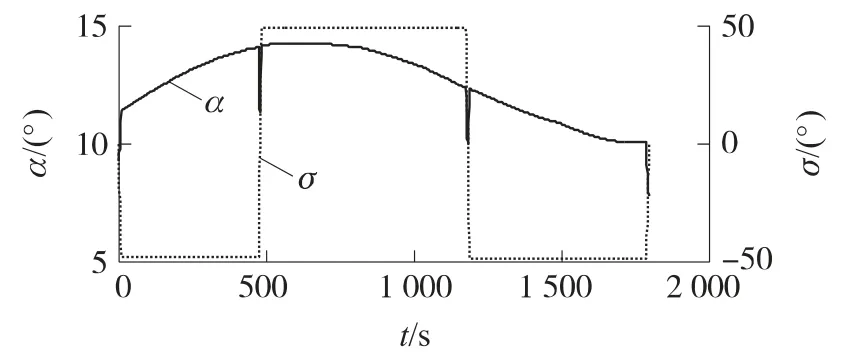
圖3 單S機動控制變量
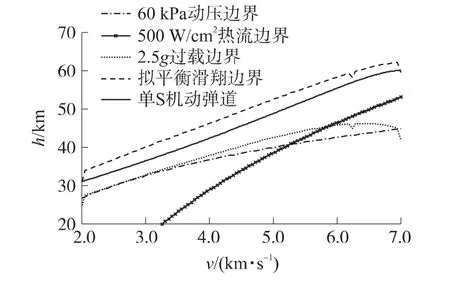
圖4 單S機動飛行走廊
單S機動還適用于既要經過航路點,又要避開禁飛區的情況,如圖5所示.
相關研究表明,影響數控機床熱變形誤差的主要原因是主軸部件熱變形誤差,由于實驗條件有限,并且這篇論文主要是驗證LWT-LSSVM建模預測方法的可行性與準確性,所以只對數控機床部分發熱部件進行實驗分析和研究。

圖5 單S機動過航路點軌跡地面投影
5.1.2 半圓機動
假設在5.1.1中的2個禁飛區中間(55°,0°)處增加一個半徑1 000km的大禁飛區,此時,從中間穿過禁飛區的方式難以實現,可以通過一次大空域半圓機動躲過所有禁飛區.結果如圖6和圖7所示,圖中圖形的含義與5.1.1中相似.

圖6 半圓機動軌跡地面投影
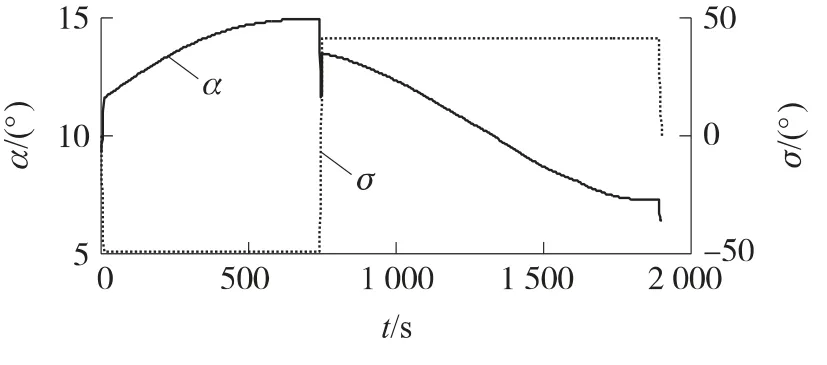
圖7 半圓機動控制變量
5.1.3 橫向蛇形機動
前面幾種機動方式都是針對可以避讓的禁飛區給出的方案,如果目標位于防御區中心,此時僅靠避讓飛行是無法擊中目標的.為了以更高的概率突破敵方防御,命中目標,進行全程機動飛行,設計飛行器在整個滑翔飛行過程中進行蛇形機動,使彈道不規則,加大對方反導系統的攔截難度.將傾側角σ用N段常值函數進行離散,離散后每段的持續時間相等.其中,N是正整數,根據軌跡橫向機動的次數來確定,本文取N=10.優化變量選取每一段的傾側角大小及總的飛行時間.結果如圖8和圖9所示,圖中,R為縱程,X為橫程.
圖8 橫向蛇形機動軌跡地面投影
圖9 橫向蛇形機動控制變量
5.2 縱向機動方式
下面給出的2種機動方式均位于縱平面內,飛行過程中傾側角為0°.
5.2.1 滑翔跳躍機動
針對2.7中介紹的第2類可避讓禁飛區,可以規劃一種更簡單的避讓機動方式.先讓飛行器按擬平衡滑翔飛行,當接近目標時通過一次跳躍,躲過目標防御系統.擬平衡滑翔階段只進行彈道積分,不進行優化計算.當接近目標時,對攻角進行離散處理,方法與橫向機動傾側角的離散方式相似,然后將離散后的分段攻角幅值和持續時間作為優化變量,求解非線性規劃問題.
圖10為滑翔跳躍機動飛行軌跡,假設飛行器從(0°,0°)開始滑翔,禁飛區是位于(100°,0°)處半徑45km的半球,圖中用虛線表示;目標位于赤道面上禁飛區之后.圖10(b)為圖10(a)的局部放大圖.以縱程最大作為目標函數,進行彈道設計.
圖10 滑翔跳躍機動飛行軌跡
圖11 滑翔跳躍機動攻角
5.2.2 縱向蛇形機動
面對橫向機動方式5.1.3中的目標情況,還可以通過縱向全程跳躍機動,加大防御系統的攔截難度.有別于最大升阻比跳躍彈道,此處對彈道傾角進行了約束,最大幅值不超過1°,避免飛行器因跳躍幅度過大而失控.以擬平衡滑翔飛行彈道的攻角規律作為離散后攻角的初值,可以保證優化出的彈道在擬平衡滑翔彈道附近做小幅振動,既便于工程實現,又能達到機動突防的效果.
此處,給定目標位置(104°,0°),以飛行時間最短作為目標函數,得到機動彈道如圖12~圖14所示.

圖12 縱向蛇形機動飛行軌跡

圖13 縱向蛇形機動攻角

圖14 縱向蛇形機動飛行走廊
6 結論
根據航路點、禁飛區和目標的分布情況,本文設計了5種機動突防模式彈道.其中,前3種屬于橫向機動方式,設計傾側角的變化規律,攻角可通過擬平衡滑翔條件得到.后2種屬于縱向機動方式,設計攻角規律,傾側角恒為0°.設計出的5種機動彈道的攻角規律、傾側角規律都比較簡單,而且得到的彈道滿足各種約束要求,驗證了本文設計方法的有效性.
[1]SHINAR J,STEINBERGT D.Analysis of optimal evasive maneuvers based on a linearized two-dimensional kinematic model[J].Journal of Aircraft,1977,14(8):795-802.
[2]TROTTEMANT E J,SCHERER C W.Robust minimax strategies for missile guidance design[C].AIAA Guidance,Navigation and Control Conference and Exhibit.Honolulu,Hawaii:AIAA,2008.
[3]MAURO P,BRUCE A C.Optimal interception of evasive missile warheads:numerical solution of the differential game[J].Journal of Guidance Control and Dynamics,2008,31(4):1 111-1 123.
[4]JORRIS T R,COBB R G.2-D trajectory optimization satisfying waypoints and no-fly zone constraints[J].Journal of Guidance,Control,and Dynamics,2008,31(3):551-572.
[5]JORRIS T R,COBB R G.Three-dimensional trajectory optimization satisfying waypoints and no-fly zone constraints[J].Journal of Guidance,Control,and Dynamics,2009,32(2):543-553.
[6]趙漢元.飛行器再入動力學和制導[M].長沙:國防科技大學出版社,1997.ZHAO Han-yuan.Vehicle reentry dynamics and guidance[M].Changsha:National University of Defense Technology Press,1997.(in Chinese)
[7]ZHANG K,CHEN W.Trajectory optimization for hypersonic vehicle satisfying maneuvering penetration[J].Applied Mechanics and Materials,2011,110:5 223-5 231.
[8]SHEN Z,LU P.On-board generation of three-dimensional constrained entry trajectories[J].Journal of Guidance,Control,and Dynamics,2003,26(1):111-121.
[9]PHILIPS T H.A common aero vehicle(CAV)model,description,and employment guide[EB/OL].[2003].http://www.dtic.millmatris/sbir041/srch/af031a.doc.
[10]BETTS J T.Practical methods for optimal control using nonlinear programming[M].Washington:Society for Industrial and Applied Mathematics,2001.
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
中學生數理化(高中版.高考數學)(2021年12期)2021-03-08 01:28:50
今日農業(2020年16期)2020-12-14 15:04:59
消費導刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45