導航衛星仿真信號控制精度測試與評定
2013-01-14 06:12:20姚志成范志良管洪杰
無線電工程 2013年10期
關鍵詞:信號
劉 巖,姚志成,范志良,管洪杰,張 輝
(西安灞橋高科技研究所衛星導航實驗室,陜西西安710025)
0 引言
隨著衛星導航仿真技術的成熟,衛星導航仿真不僅僅用于衛星導航接收機的研發與測試,一些科研機構開始研究通過構建衛星/慣性組合導航、制導控制系統的閉環半實物仿真系統,以驗證無人飛行器、艦船等所搭載控制系統的實際工作性能,其基本原理為:以仿真計算機為控制中心,根據導航/制導計算機中的信息和相應物理模型,實時仿真計算控制系統載體的位置、速率等質心運動參數,而后產生2路信號:① 送給實物/數字平臺模擬運動狀態產生慣性導航信號;②傳遞給衛星導航仿真器來模擬產生載體運動過程中的衛星信號并由衛星導航接收機接收該信號,慣性裝置的測量數據和接收機數據共同傳遞給導航/制導計算機產生相應制導信息,再傳遞給仿真計算機,為下一軌跡點的計算做好準備,從而形成一個閉環系統。
無論是彈載接收機性能的全面評估,還是組合導航系統閉環仿真驗證,都需要高性能GNSS信號仿真器。由此可見,對仿真器信號指標的測試與評定技術研究是不可缺少的。
1 仿真器信號控制精度相關指標
衛星導航仿真精度包括2部分:①數學仿真精度[1],主要指數學模型構建準確度、數值計算等;②仿真信號控制精度[2],主要指數學仿真后信號生成的控制精度。由于對實際物理模型構建各式各樣,而且不同的模型對處理實際問題的側重點不一致,很難從一個統一的方向對其進行分析。
因此,僅研究仿真信號控制精度指標的測試,主要包括以下2個方面:
①仿真器信號合成精度測試。仿真器信號合成精度測試用來標定衛星導航仿真器的真實動態分辨率、精度和能夠準確仿真的動態范圍。動態分辨率和精度測試通常根據仿真器理論分析和實際需求,選取若干組動態參數控制信號合成,進行動態參數標定。而動態范圍測試通常根據給出的仿真動態范圍計算得到相應的延時與延時變化率的動態范圍,然后設置仿真延時以相應延時和延時變化率的極值進行勻狀態變化。在進行高階動態特征測試時,為了保證對高階動態特征積分的低階動態特征不超過相應的動態范圍,需要以一定時間間隔切換延時變化的方向。
②仿真器的閉環延時測試。仿真器閉環延時測試用于標定在控制系統閉環仿真中,從仿真器接收到數據開始,經過仿真計算,到信號合成輸出該數據對應的仿真信號所需要的時間。若仿真器的延時超出或者不確定,造成導航系統信息與慣導信息的關系不匹配或不確定,這將導致控制系統綜合得到的控制命令錯誤或不可預測,從而無法分析控制系統的組合效能。在控制系統閉環仿真過程中,獲取每個閉環周期或者一部分閉環延時參數,通過統計分析出閉環延時的特性,為控制系統閉環仿真提供參數依據。
2 信號處理方法對比
2.1 仿真信號與衛星信號完好性測試的不同
衛星信號從外太空發射到地面,所經過的環境復雜多變,其信號的質量對最終的導航終端定位結果有相當的影響[3],因此在地面對實際衛星信號質量監測十分重要,其主要目的是為了保證系統所有衛星連續可靠的工作,保障用戶工作的安全性、完備性[4]。衛星信號質量的測試主要側重在信號的品質上,如對導航信號的地面接收功率(帶內功率)、頻率(頻譜、帶寬等)等實時監測,也可對典型通信信號參數如功率譜密度、眼圖、星座圖和信號調制參數等進行實時監測、信號通路測試和群延時等。
相比較而言,仿真器輸出信號一般通過屏蔽電纜直接輸出至被測接收終端,或者通過廣播天線近場發射,因此仿真的信號受外界影響很小。在仿真器中是需要通過對實際衛星信號的傳播途徑進行建模,轉換為相應的控制量來產生接收機前端的衛星信號,因此對仿真器信號的測試應該側重于信號產生的控制精度。
2.2 仿真信號與接收機信號處理方法的不同
仿真信號的指標測試必然需要對仿真信號的偽距、多普勒頻移和載波相位等參數進行估計,雖然仿真衛星導航信號的組成、調制仿真與實際衛星導航信號相同,但是仿真衛星導航信號與實際衛星導航信號也有所區別,主要表現為:
①實時性要求。接收機對信號處理[5-7]要對衛星導航信號進行實時跟蹤,提取有用信息,并解算出定位結果;而仿真器信號測試在于對仿真信號產生過程中的各個狀態量給出一個準確的量值或統計值,不需要實時解算出定位信息,可以進行離線處理。因此,仿真信號測試中可以使用這些無法滿足接收機/導航終端實時性要求的方法/算法。
②對象功率。接收機捕獲的信號來自與衛星發送的信號,終端接收的信號功率很弱,一般在-150 dBW左右[8],其有用信號湮沒在噪聲中。在對該信號處理過程中,必須通過相對長時間的相干累加,才能將從噪聲中分離出有用信號。
在仿真衛星導航信號測試過程中,仿真信號一般通過射頻電纜直接與測試采集設備連接。仿真衛星導航信號中的噪聲主要來源于3個方面[9]:有意仿真的噪聲,根據相應的噪聲模型和產生方法,人為添加到仿真信號中,用于調整仿真信號的信噪比(另一種做法是調整仿真信號的功率);數字信號合成方法本身所引入的噪聲,主要來源于相位截短和幅度截短引入的量化噪聲;仿真信號模擬和射頻電路的熱噪聲,包括數模轉換器、本振電路、混頻電路、衰減電路和濾波電路的綜合噪聲,可以根據電路的熱噪聲溫度,利用波爾茲曼常數計算得到。
③導航數據調制導航信號捕獲算法和跟蹤算法中,觀測數據塊中導航數據位的狀態翻轉會使相關運算結果與非Costa環路鑒別器輸出,相對于無翻轉時衰減kc倍(如下式所示,T為相關或相干累加序列時間長度,tDT為相對序列起始時刻的導航數據位翻轉時刻)[10]。
當導航數據翻轉時刻越接近相干積分時間段中值時,相干積分結果的衰減越大。
通道導航數據調制的開關一般作為仿真器的一項基本功能,而且易于實現。在仿真信號精度測試時,可以關閉導航數據調制(等效為調制的導航數據位全部相同)。測距碼整周模糊度可以用仿真器輸出的同步時標來確定,無需導航數據流輔助,從而避免了導航數據位翻轉引起的相干累加。因此,對導航數據位翻轉敏感的衛星導航信號處理方法可以用在仿真信號精度測試中。
④時基同步性。在仿真衛星導航信號測試中,衛星導航仿真器與測試采集設備可以共用同一基準時鐘,可以保證仿真信號精度分析中,仿真和測試采集時基差異所導致的誤差最小。此時,仿真和測試采集的時基差異主要為2路時鐘傳遞通路的不一致性:其中確定部分來源于2通路長度的差異,可以通過仿真器輸出的同步時標剝離這部分誤差的影響;隨機部分來源于2通路上不同的熱噪聲,一般將2通路上熱噪聲之差視為采集噪聲的一部分,在算法誤差分析中給出時鐘通路噪聲與其他噪聲的綜合估計。
3 總體設計方案
通過研究仿真信號動態與閉環延時指標測試技術,提出一套完整的測試方法,總體工作思路如圖1所示。
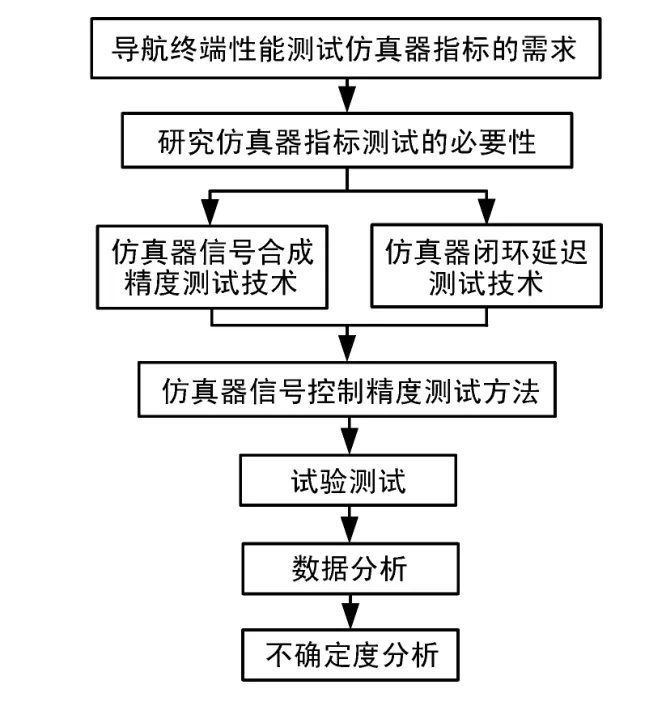
圖1 總體工作思路
3.1 高階鑒頻器模型
在導航終端信號處理中,為了提高載波頻率估計分辨率,需要利用估計的測距碼初相產生的本地測距碼序列,對觀測信號中的測距碼序列進行解調,然后通過鑒頻器進行若干次頻率牽引,獲得較為準確的頻率估計結果。通常所用的鑒頻器有叉積型(Cross)、符號判別叉積型(Sign Cross)和反正切(Atan2)型3種,鑒頻特性如圖2所示。
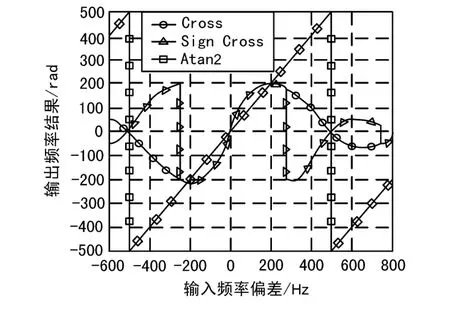
圖2 常用鑒頻器的鑒別特性
Atan2鑒頻器是一個4像限反正切鑒別器,在高信噪比和低信噪比時均是頻率偏差的最大似然估計,且斜率與信號幅度無關[11]。從圖2中也可以看出在一個相關周期內(1 ms),輸出和輸入基本呈線性關系,因此以Atan2鑒頻器為基礎,構建高階鑒頻器模型。
Atan2鑒頻器算法為:

式中,IPS1,QPS1為本地復現載波正交2路信號;IPS2,QPS2為接收的載波正交2路信號;t2-t1為載波信號采樣時間間隔。為了在一個周期內構建高階模型,將每個周期分成3段,每段時間間隔為T。設選取碼延時和多普勒頻移的零階、一階、二階量作為系統狀態量,記為:
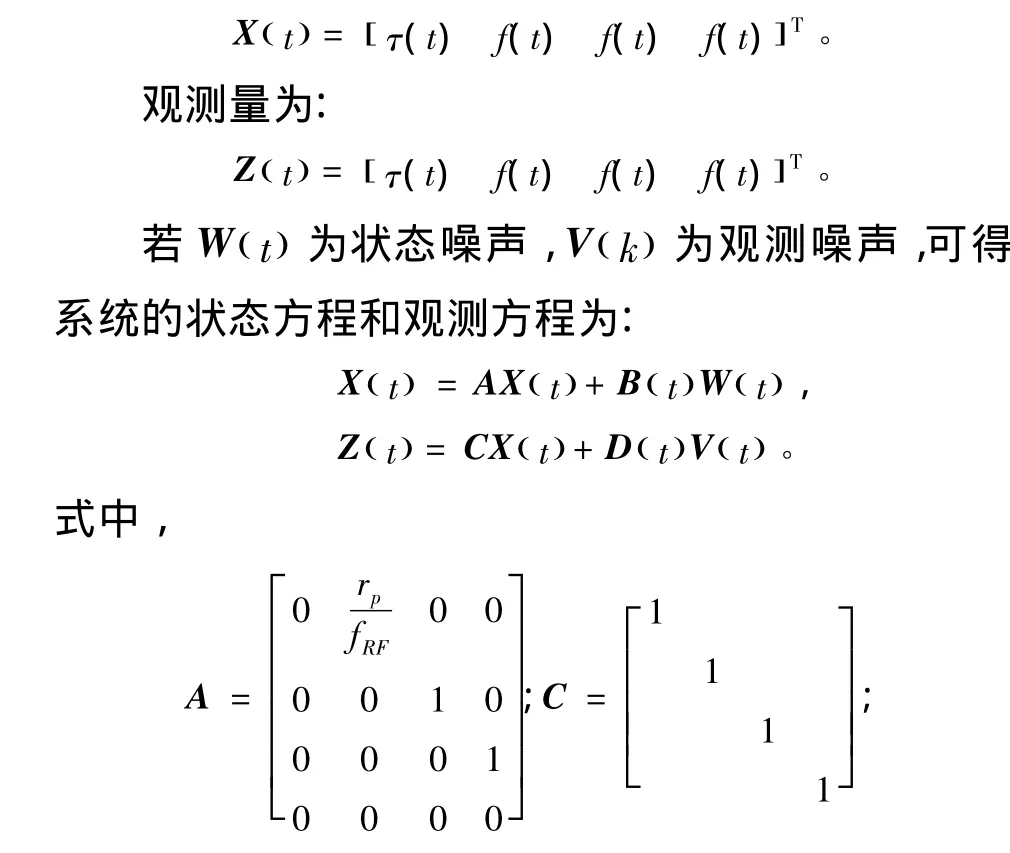
rp為碼速率;fRF為射頻頻率。對上式進行離散化,若采樣周期為T,可得

3.2 模型分析方法的選擇
卡爾曼濾波器是一種線性無偏差遞推濾波器,作為一種最優估計,被廣泛應用于各種動態數據處理中,設計方法也簡單易行。它有以下幾個顯著的特點[12]:① 用狀態空間來描述數學公式;②具有遞歸結構的有限維線性離散時間系統,很適合用數字計算機實現,而且可以不加修改地應用到平穩和非平穩環境;③從隨機狀態空間導出的線性動態系統狀態的最小均方估計。狀態的每次更新估計都是由前一次估計和新的輸入數據計算得到,所以只需要存儲前一次的估計。因此卡爾曼濾波算法在計算上比直接根據濾波過程中每一步所有過去數據進行估值的方法更有效。
模型誤差的統計性質是時變的,噪聲是相關的。若量測噪聲和狀態噪聲的統計性質不夠了解,一方面會導致濾波結果不精確或者把偏差加到狀態估計里面去;另一方面將導致濾波發散[13]。
3.3 狀態量估計算法
狀態量估計算法原理框圖如圖3示。
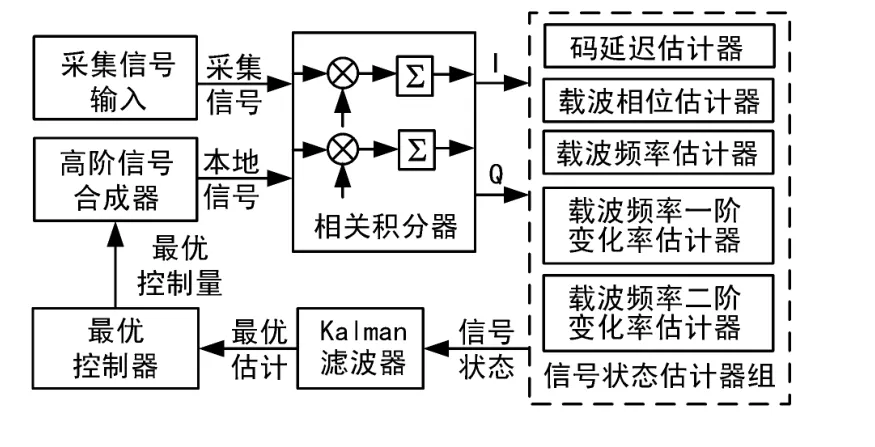
圖3 狀態量估計算法原理
第1步,將采集信號和高階信號合成器產生的本地信號同時輸入相關積分器,獲取I、Q之路信息;
第2步,IQ兩路信號輸入信號狀態估計器組,對信號進行處理,獲取信號的狀態粗估計量;
第3步,狀態粗估計量輸入到濾波器得到信號狀態的最優估計值;
第4步,通過信號的狀態最優估計值合成本地信號用于下一步的信號相關。
4 實驗方案
在研究過程中,研究方案采用系統建模→理論計算→數字仿真→測試系統搭建→數據采集分析4個步驟進行,對結果進行有效驗證。
4.1 仿真器信號合成精度測試實驗方案
通過仿真器控制軟件,設置仿真器工作在單一通道輸出模式,分別設置仿真偽距變化率、偽距二階變化率、偽距三階變化率為+0.01m/s、+0.01m/s2、+0.01m/s3運行一段時間;利用高精度示波器對仿真信號進行依次采樣并存儲。使用本文提出的方法,對采樣的數據進行處理,獲取仿真器動態分辨率和精度。多次重復以上實驗,得出該指標的統計信息。
4.2 閉環延時測試實驗方案
實驗以運載閉環控制系統為實驗平臺,如圖4所示。
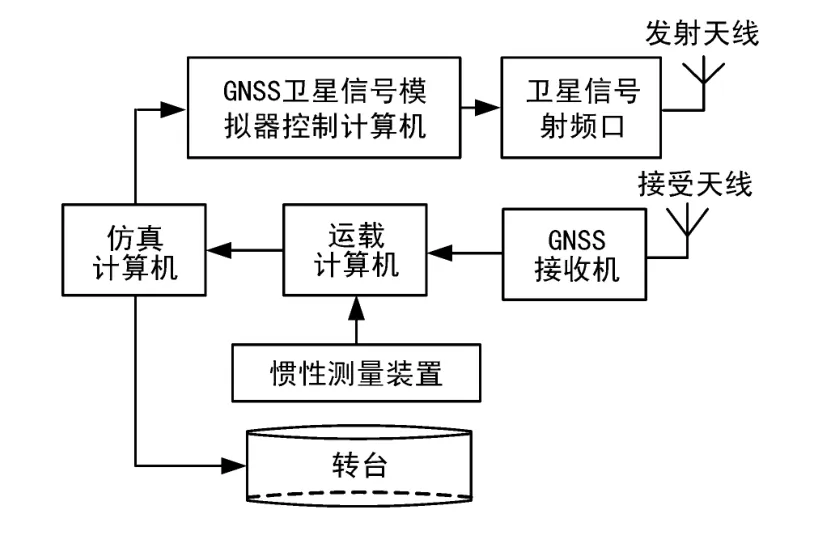
圖4 閉環延時測試實驗原理
以仿真計算機為控制中心,根據計算機中的信息,實時模擬計算用戶的軌跡點,產生2路信號:一路信號控制三軸轉臺的轉動控制慣性裝置模擬運動狀態;另一路傳遞給GNSS衛星信號仿真器來模擬產生載體運動過程中的衛星信號并通過天線發射出去,然后由GNSS接收機接收該信號。慣性裝置的測量數據和GNSS接收機的數據共同傳遞給運載計算機,最終由運載計算機將其信息傳遞給仿真計算機,為下一軌跡點計算做準備,這樣形成了一個閉環。
5 結束語
論文成果可應用到GNSS仿真器的指標測試,為運載控制系統半實物仿真和運載接收機測試評估提供相應的指標依據。更重要的是為運載接收機的動態功能測試提供了可行性,對運載接收機的性能給出一個全面、量化和可靠的評估依據,從而提高系統的可靠性和精度;另一方面,降低了載體運動過程的高動態導航衛星信號獲取時的人力、物力上的消耗,并且保證了每次實驗條件完全一致,有利于通過重復試驗來定位所設計組合導航系統中存在的問題。
[1] 趙軍祥.高動態智能GPS衛星信號仿真器軟件數學模型研究[D].北京:北京航空航天大學博士學位論文,2003:11-14
[2] 朱宇虹.高動態GPS衛星信號仿真器的研究與設計[D].北京:北京航空航天大學博士學位論文,2004:8-13.
[3] PHELTS R E,AKOS D M,ENGE P.Robust Signal Quality Monitoring and Detection of Evil Waveforms[C]∥Proceedings of the Institute of Navigation ION GPS.Salt Lake City:UT,2000:1 180-1 190.
[4] CHRISTIE J R I,BENTLEY P B.GPS Signal Quality Monitoring System[C]∥ION GNSS 17th International Technical Meeting of the Satellite Division 2004.USA:SunDiego,2004(9):21-24.
[5] 寇艷紅.GNSS軟件接收機與信號模擬系統研究[D].北京:北京航空航天大學博士學位論文,2006:6-12.
[6] HURD W J.High Dynamic Global Position System Receiver[P].US:4578678,1986.
[7] HINEDI S,STATMAN J I.High-Dynamic GPS Tracking[J].NASA Publication,1988(5):89-113.
[8] Navstar GPS Joint Program Office.Navstar GPS Space Segment/Navigation User Interfaces[R].IS-GPS-200D,US Air Force:Rev D,2006(3):11-14.
[9] DONG Lei.IF GPS Signal Simulator Development and Verification[D].A Thesis of Master of Science,University of Calgary,Alberta,Canada,2003(11):25-29.
[10] XU Guo-chang.GPS:Theory,Algorithms and Applications[M].Berlin Germany:Spriner Verlag,2003:261-289.
[11] KAPLAN E D,HEGARTY C J.Understanding GPS Principles and Applications 2nd Edition[M].Boston/London:Artech House Inc,2006:1-9.
[12]宋迎春.動態定位中的卡爾曼濾波研究[D].湖南:中南大學博士學位論文,2006:11-18.
[13] TODA N F,SCHLEE F H,OBSHARSKY P.Regions of Kalman Filter Convergence for Several Autonomous Navigation modes[J].AIAA Guidance,Control and Flight Dynamics Conf,Huntsville,1967(8):617-623.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
