交通沖突技術檢測與判定研究現狀綜述
2013-01-31 09:06:38王玉全胡小平
中國科技信息 2013年7期
關鍵詞:研究
王玉全 胡小平
北方工業大學機電工程學院自動化系,北京市 100144
交通沖突技術檢測與判定研究現狀綜述
王玉全 胡小平
北方工業大學機電工程學院自動化系,北京市 100144
分析交通沖突技術國內外研究現狀,從交通沖突技術的概念出發,分別闡述傳統交通沖突技術觀測方法、沖突判定規則及在道路交通安全評價中的應用,總結傳統的沖突觀測方法和沖突判定規則的局限性,并將其與基于視頻處理技術的交通沖突技術研究進行比較,分析基于視頻的沖突技術研究的可行性,最后為交叉口交通沖突技術的發展提出一些淺見。
交通沖突技術;視頻處理;道路交通安全評價
引言
道路交通安全評價是道路交通安全研究的一項重要內容。傳統的交通安全評價方法依賴交通事故的統計,由于交通事故統計的不完善,直接影響了交通安全評價的可信度水平。國內外大量學者的研究[1,2]已表明:事故與沖突雖然有差異,但是他們具有線性特征且呈現一定的規律性,也就是說沖突對事故具有可替換性。因此,交通沖突技術作為一種非事故統計的交通安全間接評價方法,擁有著大樣本、快速、定量研究的特點,備受大家的關注。
交通沖突技術不但起步較晚,發展也十分緩慢,總結國內外交通沖突的現狀,突出的問題是交通沖突識別與判定的方法遇到了瓶頸。沖突的發生也是轉瞬即逝的過程,不易捕捉[3];對交叉口交通沖突對象的研究,已深入到不同的交通行為者之間,觀測更加困難[4,5]。
因此,創造一種便捷,迅速,準確,高效的交通沖突識別手段,進而研究一種與之相應的交通沖突判定方法,將成為交通沖突技術研究的重點。
1 交通沖突的概念
1997年我國學者對交通沖突的第一次定義[6]:在道路交通安全評價中,交通沖突是在可觀測條件下,兩個或兩個以上道路使用者在同一時間,空間上相互接近,如果其中一方采取非正常交通行為,如轉換方向、改變車速、突然停車、交通違章等,除非另一方也相應采取避險行為,否則,會處于碰撞的境地,這一現象就是交通沖突。因此,交通沖突與交通事故有著相同的開始與過程,區別在于是否造成損害性結果。
2 傳統的交通沖突觀測方法
傳統沖突觀測法主要包括人工現場觀測法和錄像觀測法兩種[7]。
2.1 人工現場觀測
人工現場觀測要求對觀測人員進行專業的培訓,以提高記錄可靠性。美國聯邦交通部出版的《交通沖突技術安全運行用戶手冊》[8]中按照人工現場觀測的特點將交叉口交通沖突劃分為14種沖突類型。
并描述了交叉口交通沖突發生的4個階段:
第一階段,第一車輛首先發生行為;比如,從橫向車道駛出。
第二階段,第二車輛由此處于可能碰撞的危險境地。
第三階段,第二車輛的駕駛人員采取剎車或者改換車道等反應行為。
第四階段,第二車輛繼續行駛安全通過相互作用區域。
規定人工觀測到上述4個階段發生時,記錄一次交通沖突。該觀測方法受到現場觀測條件的限制,以及對現場觀測員較高的素質要求,很難控制觀測準確度;此外由于觀測時長的要求,造成人力成本過高。
2.2 錄像觀測法
錄像觀測法是指對觀測路口進行錄像后,分析人員對錄像資料進行反復觀看,并通過與同組人員的討論對沖突發生、沖突嚴重性進行確定[9]。該方法解決了人工現場觀測對環境和觀測人員的嚴格要求,但并沒有從根本上解決沖突觀測數據精度和觀測效率。因此,傳統的沖突觀測方法限制了交通沖突技術的進一步發展和應用。
2.3 基于視頻的交通沖突數據采集
鑒于傳統觀測方式的局限性,隨著計算機視覺圖像處理技術大量應用于交通數據采集和監控中,通過視頻采集數據來檢測交通沖突的方法,逐漸受到國內外學者的關注。
2004年S. Atev和O. Masoud等采用多個攝像機視頻序列圖像進行數據融合,更好地展示目標的運動特征和車輛之間的相互作用[10]。2005年Messelodi和Modena提出交叉口車輛碰撞概率的計算方法,該方法也是基于視頻自動采集的大量微觀交通數據[11]。2008年張方方等對視頻數據信息中進行處理提取沖突車輛的運動軌跡、速度、加速度等微觀交通參數,實現交通沖突微觀參數采集,根據車輛的軌跡、速度和加速度曲線對車輛的運行特征做出分析,初步實現簡單交通條件下機動車交通沖突視頻自動檢測[12]。
總的來說,各國學者對視頻檢測車輛的研究也為交通沖突自檢測提供了可發展的平臺[13,14,15],因此,視頻數據采集取代人工觀測趨勢明顯。
3 交通沖突判定規則
3.1 交通沖突嚴重程度劃分
有學者研究表明[16]:事故與沖突的關系可用沖突的嚴重性程度進行描述。根據交通危險事件的嚴重性又可具體分為無干擾通過、非嚴重沖突、嚴重沖突和事故,其數量關系呈塔形分布,如下圖1。
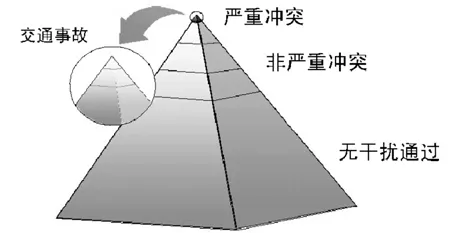
圖1 車輛之間交通事件塔形分布圖
傳統的非嚴重沖突和嚴重沖突主要按其特征描述進行劃分[17]:當交通行為者遇到其他交通行為者的逼近,需要采取避險行為才能避免事故的發生時,非嚴重沖突的主要特征是,交通行為者感知到一定的壓力,存在較為充分的時間進行預判,嚴重沖突的主要特征是,交通行為者感知到相當大的心理壓力,必須采取迅速有效的緊急避險行為,動作劇烈,預判時間緊迫。
道路安全評價的研究在于確定嚴重沖突與事故的定量關系,交通沖突研究的關鍵在于判定是否為嚴重沖突。由于沒有硬件技術的支持,人工觀測沖突依據汽車制動燈的顯示判斷,對嚴重程度的區分存在很大的主觀性。這也是傳統觀測限制交通沖突技術發展的重要原因之一。
3.2 交通沖突判定規則

圖2 汽車制動過程
如今的交通沖突判定規則主要基于汽車制動的距離、速度、時間來制定[18,19],但是由于傳統沖突觀測條件限制導致判別時常用其中一項參數作為判別標準。
上圖2為汽車制動過程圖解。
t1——制動力操作反應的時間;
t3——制動力增長時間;
t4——制動力達到最大值后的持續制動時間。
其中,t1內汽車駛過的距離為:
S1=vtt1
t2內汽車駛過的距離為:

t3內汽車駛過的距離為:
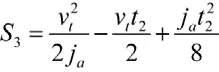
其中ja是汽車制動的最大加速度,vt是汽車制動前的瞬時速度。而沖突觀測只能在制動力產生作用時進行,因此,沖突判定下汽車制動距離為:
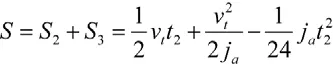
根據國標GB7258-87,車輛制動系統制動力增長時間t及最大制動減速度,由車輛的制動過程可以得到沖突發生時車輛速度分別與最大制動距離和制動時間之間的關系如下表所示:
表1 不同質量下車輛制動時長及最大制動減速度的關系

表2 不同質量下車輛速度與制動距離及最大制動時長的關系
因此通過設定各種車輛不同速度下最大制動距離S來判斷沖突的發生。若觀測到車輛有異常行為時,車輛間的距離大于最大,則認為是非嚴重沖突,若車輛間的距離小于臨界距離則認為是嚴重沖突。以最大制動距離S作為判別沖突的方法稱為空間距離法。
由車輛的制動過程,同樣可以得到各種車輛在不同速度下距離發生事故點的所需要的最大制動時間T。若這個時間小于最大制動時間T,則視為發生嚴重沖突,美國公路研究所提出嚴重沖突臨界值為1s,瑞典是1.5s。
上述兩種方法缺點是對于交叉口轉彎過程中車輛沖突的識別不夠完善。
能量判別法[20],該方法將車輛轉化為一個質點,根據物理學中能量守恒定律理論,以通過計算沖突質點采取避險行為時所產生的碰撞能量的大小來衡量沖突。
該方法引用汽車碰撞理論——一起碰撞事故的能量消耗越大,事故的嚴重危險性(ROC)也越大,對交通沖突的ROC進行分析。定義衡量沖突危險性的重要指標,沖突能量:沖突車輛在采取避險行為生效的瞬間所具有的破壞性動能,用E表示。
對應不同類型沖突的沖突能量可用下列公式表示:
(1) 正向沖突和追尾沖突:
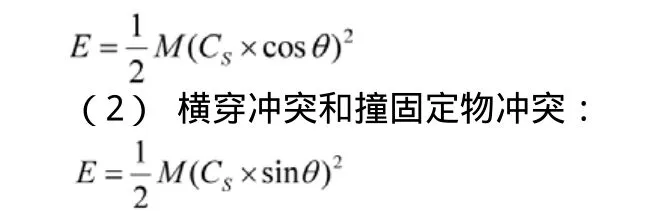
式中:
E——沖突能量(N·m)
M——沖突車輛的質量(kg)
CS——沖突速度(m·s-1)
θ——沖突角(度)
沖突車輛在采取避險行為后,以最大減速度行進直到相撞點,并且車輛在此過程中能量全部損失,即等于路面摩擦力所消耗的能量,這種損失的能量被定義為沖突損耗,其計算公式為:
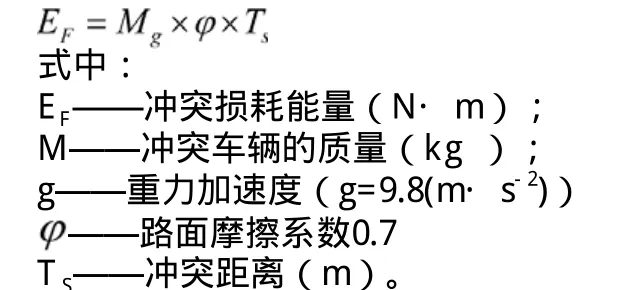
由沖突能量和沖突損耗可以定義碰撞能量(TED),即沖突車輛在到達相撞點時所具有的破壞性能量。那么,根據 TED 的大小就可判斷沖突的危險性ROC,TED 越大,則沖突的危險性越大。其計算公式為:

臨界沖突區域判別法,以目標車輛為坐標原點,建立直角坐標系,通過對車輛的行駛方向、角度及速度進行分解,計算沖突對象之間沖突半徑,建立相應的沖突臨界區域來判定交通沖突[21]。該判別模型突破了傳統以單一交通目標為研究對象的局限性,綜合考慮出沖突對象雙方的行駛方向,速度,距離等指標,完善了基于視頻的沖突判定規則。
由于沖突判定模型均需要獲取交通對象的速度、角度、位置等精確數值,對沖突檢測手段,設備精度要求很高,而以傳統的觀測手段以人工調查為主,很難達到沖突判定模型的觀測精度要求,從而降低了交通沖突調查的準確程度。
3.3 基于視頻的交通沖突檢測與判定應用
隨著視頻圖像處理技術的應用,為交通沖突檢測與判定開辟了另一種途徑。
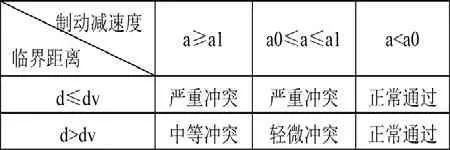
表3 加速度與距離結合法沖突判定規則
加速度與距離結合法[22],通過視頻技術對車輛進行跟蹤,通過齊次坐標轉換將圖像坐標轉換為地面坐標,以得到車輛的真實行駛位置;通過兩幀之間位置變化,得出車輛真實的行駛速度及加速度,最后對實際路口進行分析分析,得出判定交通沖突的臨界值為a0為4m·s-2和臨界距離dv為10米,界定輕微沖突與嚴重沖突的臨界值為a1為2m·s-2。制訂了如下的判定規則。
軌跡預測法[23],利用視頻技術,檢測交通對象并進行跟蹤,獲取物體運動數據與類別的基礎上,記錄其時空運動軌跡;并引入GM(1,1)灰色模型實現對交通對象的軌跡預測,從而判斷在未來的一段時間內是否有與其他對象發生事故的可能,結合交通對象方向和速度的變化,判斷出沖突現象。
可以說引入視頻圖像處理技術,使得學者能更加全面系統,定性定量的分析和制定交通沖突判定方法,給交通沖突的判定方法研究開拓了新空間。
4 結語
隨著城市發展的加快,城市道路更加從綜復雜,道路交叉口的安全評價日益重要,交通沖突技術作為道路安全評價的有效手段需要發揮更大的作用,因此,對交通沖突技術的理論和應用研究有著重大的意義。
視頻處理技術的引入,將交通沖突技術的研究帶向了一個更廣闊的平臺,但是由于視頻處理技術的不成熟,還存在如下一些亟需解決的問題。
1)觀測精度的要求。沖突的發生表現在交通行為者的行駛速度、行駛方向變化,嚴重程度體現在加速度、減速時間、轉向角度、沖突者之間距離等數據的變化。基于視頻的交通沖突觀測需要更加全面的交通行為數據采集,因為這些數據精度直接影響著沖突判定的精度。
2)攝像機成角度拍攝導致精度下降。采集交通數據時,攝像機往往成一定角度進行拍攝,由于二維視頻圖像較真實場景有所差異,因此,還原真實數據的方法有待解決。
3)觀測速度要求。基于視頻的交通沖突的優勢之一在于實時性,由于交叉口交通行為者較多,因此亟需完善一種全面、準確、實時的數據采集手段。
4)制定基于視頻的交叉口交通沖突的判定規則。傳統的沖突判定有受到觀測手段的局限,僅僅依靠單一的參數進行判定,對嚴重沖突判定的誤差較大。基于視頻的交通沖突采集數據更加完善,因此制定一套綜合考慮交通行為者的交通狀態,且適合視頻采集數據的沖突判定規則,有著重要的意義。
5)沖突對象的判定。由于城市道路交叉口大多缺乏行人天橋或者通道,沖突發生往往由機動車和機動車以外的交通行為者造成,因此,基于視頻的交通沖突檢測在非機動車與行人檢測方面有待研究。
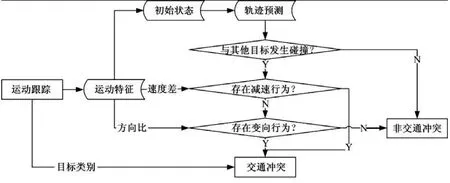
圖3 軌跡法沖突判定規則
[1]王玉江.路段交通沖突技術研究[D].昆明理工大學,2008
[2]Glauz W. D.,Migletz D. J. Application of Traffic Conflict Analysis at Intersections [J].TRB,NCHRP Report,USA. 1980:218-221
[3]李曉娟,丁藝.交通沖突技術及其研究現狀分析[J].森林工程,2006,22(1):41-43
[4]王力,劉衛中,洪于亮,范耀祖.基于分類交通沖突與微觀仿真分析的城市交叉口安全診斷及改善[J].中國安全科學學報,2009,19(2):38-42
[5]付銳,魏朗,駱勇,牛永亮.鄭州黃河公路大橋交通安全沖突技術的研究[J].中國公路學報,2000,13(3):86-88
[6]劉小明,段海林.平面交叉口交通沖突技術標準化研究[J].公路交通科技,1997,14(3):29-34
[7]劉志強,葛如海,龔標.道路交通安全工程[M].北京:化學工業出版社,2005
[8]M.R. Parker,C.V. Zegeer,Traffic Conflict Technique for Safety and operations: Observers manual[R]. U.S. Federal Highway Administration,Washington, D. C.,1989
[9]盧川,項喬君,張國強,吳群.公路平交口交通沖突嚴重性的判定[J].合肥工業大學學報(自然科學版),2008,31(5):683-686
[10]S. Atev, O. Masoud,R. Janardan,N.Papanikolopoulos,Real-Time Collision Warning and Avoidance at Intersections[C]. Final Report,MN/RC,2004,12
[11]S. Messelodi,C. M. Modena,A Computer Vision System for traffic accident risk measurement:A case study[J]. Advances in Transportation Studies an international Journal Section B7,2005
[12]張方方.基于視頻的平面交叉口機動車交通沖突檢測技術研究[D].同濟大學工學碩士學位論文,2008
[13]曲昭偉,李志慧,胡宏宇,郭偉偉,魏巍.基于視頻處理的無信號交叉口交通沖突自動判別方法[J].吉林大學學報(工學版),2009,39(2):163-167
[14]王俊驊,張方方,張蘭芳.基于OpenCV和Halcon的交通沖突視頻自動檢測及數據處理[J].同濟大學學報,2010,38(2):238-244
[15]李志慧,趙永華,魏巍等.基于視頻的自行車檢測算法[J].吉林大學學報(工學版),2010,40(5):1235-1238
[16]胡宏偉.基于視頻處理的交通事件識別方法研究[D].吉林大學,2010
[17]王海星,申金升.基于TCT的平面交叉口安全評價方法研究[J].中國安全科學學報.2005,15(5):101-104
[18]項喬軍,陸鍵,盧川,葛興.道路交通沖突分析技術及應用[M].科學出版社,2008
[19]成衛.城市道路交通事故與交通沖突技術理論模型及方法研究[D].吉林大學,2004
[20]Older S. J.,ShiPPy J. Proceedings of the Second International Traffic Conflict Workshop[J].1979:21-25
[21]羅石貴,周偉.路段交通沖突技術研究[J].長安大學學報,2991,23(1):71-75
[22]仲媛媛.基于交通沖突的公路平面交叉口模糊安全評價研究[D].哈爾濱工業大學工學碩士學位論文,2006
[23]郭偉偉,曲昭偉,王殿海.交通沖突判別模型[J].吉林大學學報(工學版),2011,41(1):35-40
Overview of the Research on Intersection Traffic Conflict Technique
Wang Yuquan,Hu Xiaoping
North China University of Technology,Beijing 100144
Research on the situation of traffic conflict technology,explanation of the basic concept of this technology,observation methods,discrimination rules of traffic conflict technology and intersection traffic conflict technique in the safety assessment application. Summary of the limitations about the traditional observation methods and discrimination rules of traffic conflict technology,a comparison between the video technology of traffic conflict and the tradition traffic conflict technology,analysis the feasibility of video-based technology of conflict,some view for developments on the intersection traffic conflict technology were put forward in the last.
traffic conflict technique;video processing;crossing traffic safety assessment
國家高技術研究發展計劃(863計劃)交通樞紐綜合感知與智能管控平臺(2012AA112401);科研基地-科技創新平臺-城市混合交通信號控制系統平臺建設(PXM2012_014212_000001)
10.3969/j.issn.1001-8972.2013.07.065
王玉全(1984-).女,工學博士研究生,講師,研究領域為:智能交通;
胡小平(1986-).男,工學碩士研究生,研究方向為:智能交通。
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
遼金歷史與考古(2019年0期)2020-01-06 07:45:20
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
電子制作(2018年11期)2018-08-04 03:26:04
汽車工程學報(2017年2期)2017-07-05 08:13:02
國際商務財會(2017年8期)2017-06-21 06:14:14
電子制作(2017年23期)2017-02-02 07:17:19
