多軸液壓助力轉(zhuǎn)向系統(tǒng)匹配設(shè)計(jì)研究
2013-02-01 01:39:30王云超張小江鄭東強(qiáng)
中國機(jī)械工程 2013年10期
王云超 張小江 周 梅 鄭東強(qiáng)
1.集美大學(xué),廈門,361021 2.吉林大學(xué),長春,130022
多軸液壓助力轉(zhuǎn)向系統(tǒng)匹配設(shè)計(jì)研究
王云超1張小江2周 梅1鄭東強(qiáng)1
1.集美大學(xué),廈門,361021 2.吉林大學(xué),長春,130022
多軸液壓助力轉(zhuǎn)向系統(tǒng)普遍存在轉(zhuǎn)向桿系變形和斷裂的問題。基于輪胎原地轉(zhuǎn)向阻力矩的半經(jīng)驗(yàn)公式,利用ADAMS和AMESim建立了某多軸轉(zhuǎn)向車輛的機(jī)液聯(lián)合仿真模型。在驗(yàn)證模型正確性的基礎(chǔ)上,以轉(zhuǎn)向桿系受力最小為優(yōu)化目標(biāo),進(jìn)行了轉(zhuǎn)向油缸和輪胎原地轉(zhuǎn)向阻力矩的匹配優(yōu)化。研究發(fā)現(xiàn),轉(zhuǎn)向油缸與輪胎原地轉(zhuǎn)向阻力矩的匹配關(guān)系對轉(zhuǎn)向桿系的受力影響非常明顯,優(yōu)化后轉(zhuǎn)向桿系受力顯著減小。
多軸轉(zhuǎn)向;匹配設(shè)計(jì);液壓助力轉(zhuǎn)向;輪胎原地轉(zhuǎn)向阻力矩
0 引言
目前,關(guān)于多軸轉(zhuǎn)向系統(tǒng)的研究主要集中在轉(zhuǎn)向機(jī)構(gòu)的優(yōu)化方面,概括起來有兩種:一種是基于虛擬樣機(jī)技術(shù)的優(yōu)化[1-2];一種采用建立數(shù)學(xué)模型進(jìn)行優(yōu)化[3-4]。這些研究僅僅局限于運(yùn)動關(guān)系的優(yōu)化,關(guān)于轉(zhuǎn)向桿系動力學(xué)分析的研究很少。
多軸轉(zhuǎn)向技術(shù)主要應(yīng)用于需要小范圍內(nèi)轉(zhuǎn)移場地的大型車輛,原地靜止轉(zhuǎn)向是其主要工況之一。多軸轉(zhuǎn)向車輛的工作場地多為崎嶇的工作場地,各轉(zhuǎn)向輪的轉(zhuǎn)向阻力矩大小不同,很容易造成個別桿件受力過大而發(fā)生彎曲或扭斷[5-6]。
由于輪胎的原地轉(zhuǎn)向特性與液壓轉(zhuǎn)向油缸輸出力的匹配性是影響轉(zhuǎn)向桿系受力的重要因素,而輪胎的原地轉(zhuǎn)向特性是轉(zhuǎn)向系統(tǒng)匹配設(shè)計(jì)的基礎(chǔ),為此,很多國內(nèi)外學(xué)者對輪胎原地轉(zhuǎn)向特性[5]、低速輪胎特性對轉(zhuǎn)向控制的影響[7]、輪胎設(shè)計(jì)參數(shù)對側(cè)向力學(xué)性能的影響[8]、輪胎與路面的接觸力學(xué)等進(jìn)行了研究[9]。楊勇等[10]開發(fā)了針對多軸起重機(jī)的聯(lián)合仿真平臺,在整車操縱性能分析方面進(jìn)行了重點(diǎn)研究。但多軸液壓助力轉(zhuǎn)向系統(tǒng)的匹配研究尚未檢索到相關(guān)報道。
本文在重型多軸轉(zhuǎn)向車輛輪胎原地轉(zhuǎn)向阻力矩研究的基礎(chǔ)上[5],從輪胎轉(zhuǎn)向阻力矩與轉(zhuǎn)向液壓系統(tǒng)匹配性優(yōu)化的角度出發(fā),以某九軸轉(zhuǎn)向車輛為研究對象,利用虛擬樣機(jī)聯(lián)合仿真技術(shù),以轉(zhuǎn)向桿系受力最小為目標(biāo),通過優(yōu)化各軸轉(zhuǎn)向油缸的缸徑和桿徑,達(dá)到轉(zhuǎn)向桿系受力最小的目的,實(shí)現(xiàn)液壓助力轉(zhuǎn)向系統(tǒng)匹配優(yōu)化。
1 輪胎原地靜止轉(zhuǎn)向阻力矩的確定
為了準(zhǔn)確掌握輪胎原地轉(zhuǎn)向特性,針對樣車輪胎進(jìn)行了專項(xiàng)測試。通過對試驗(yàn)數(shù)據(jù)的分析處理,提出輪胎轉(zhuǎn)向阻力矩經(jīng)驗(yàn)公式的一般形式[5]:

式中,F(xiàn)為垂直輪荷;α為車輪轉(zhuǎn)角;p為輪胎氣壓;μ為路面摩擦因數(shù);a、b為待擬合參數(shù);C、E分別為決定曲線剛度和形狀的參數(shù);α0為決定曲線初始值的參數(shù)。
圖1所示為幾種載荷工況下輪胎轉(zhuǎn)向阻力矩的測試結(jié)果和擬合結(jié)果。其中,Tk為測試結(jié)果;下標(biāo)k為輪胎載荷,t;Tkn為由式(1)獲得的擬合結(jié)果。由圖1可知,擬合所得的半經(jīng)驗(yàn)公式能夠以較高的精度反映輪胎的原地轉(zhuǎn)向阻力矩。從圖1可以看出,車輪轉(zhuǎn)角小于15°時,車輪轉(zhuǎn)角對轉(zhuǎn)向阻力矩的影響非常明顯,超過15°后,車輪轉(zhuǎn)角的影響逐漸減小。

圖1 左轉(zhuǎn)的測試結(jié)果和擬合結(jié)果
2 整車虛擬樣機(jī)模型
利用虛擬樣機(jī)技術(shù),建立了圖2所示的樣車虛擬樣機(jī)模型,該車前五軸采用液壓助力轉(zhuǎn)向,轉(zhuǎn)向油缸安裝在轉(zhuǎn)向梯形臂和車軸之間,左右對稱布置。后四軸采用電液控制轉(zhuǎn)向。

圖2 九軸轉(zhuǎn)向車輛虛擬樣機(jī)模型
2.1 液壓助力轉(zhuǎn)向系統(tǒng)建模
為了保證液壓轉(zhuǎn)向的可靠,液壓助力系統(tǒng)采用雙回路,利用AMESim建立了前五軸液壓助力轉(zhuǎn)向系統(tǒng)的液壓部分模型,如圖3所示。液壓系統(tǒng)和機(jī)械系統(tǒng)通過接口模塊傳遞油缸長度、速度及油缸受力等信息,實(shí)現(xiàn)機(jī)液聯(lián)合仿真。
2.2 液壓系統(tǒng)驗(yàn)證
為了驗(yàn)證液壓系統(tǒng)的正確性,對液壓系統(tǒng)的部分元件進(jìn)行了流量和壓力的對比分析,如圖4、圖5所示。圖4、圖5中,泵與轉(zhuǎn)向器的輸出、輸入流量及壓力的試驗(yàn)結(jié)果和仿真結(jié)果基本一致,證明所建模型是正確的。

圖3 液壓助力轉(zhuǎn)向系統(tǒng)模型
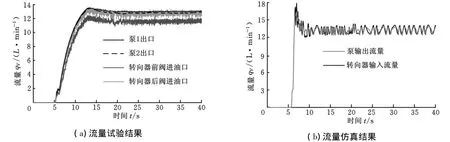
圖4 流量的試驗(yàn)結(jié)果與仿真結(jié)果
3 轉(zhuǎn)向油缸匹配試驗(yàn)及模型驗(yàn)證
原車前五軸轉(zhuǎn)向油缸的尺寸為φ60mm×32mm,為了驗(yàn)證轉(zhuǎn)向油缸對轉(zhuǎn)向桿系受力的影響,將第4軸、第5軸轉(zhuǎn)向油缸尺寸改為φ50mm×28mm,進(jìn)行對比試驗(yàn)。

圖5 系統(tǒng)壓力測試和仿真數(shù)據(jù)對比
3.1 轉(zhuǎn)向系統(tǒng)試驗(yàn)和仿真分析
以原地轉(zhuǎn)向工況為例,對仿真模型和試驗(yàn)結(jié)果進(jìn)行對比分析。根據(jù)樣車測試數(shù)據(jù),對整車模型中的路面摩擦因數(shù)、軸荷、轉(zhuǎn)向盤轉(zhuǎn)角等參數(shù)進(jìn)行了修正,并重新進(jìn)行仿真。測試和仿真結(jié)果如表1所示,曲線如圖6所示。

表1 匹配設(shè)計(jì)前后測試和仿真結(jié)果對比
由于試驗(yàn)過程中,第8桿應(yīng)變片的連接線斷掉,因此表1沒有給出該桿件的測試結(jié)果。從原始設(shè)計(jì)的測試結(jié)果和匹配設(shè)計(jì)的測試結(jié)果的符號可以看出(桿件受拉為正,受壓為負(fù)),更換油缸前后轉(zhuǎn)向桿系受力傳遞方向發(fā)生了明顯的變化。從匹配設(shè)計(jì)測試結(jié)果和仿真結(jié)果對比看,兩者基本一致,說明虛擬樣機(jī)模型能夠正確預(yù)測轉(zhuǎn)向系統(tǒng)的受力。
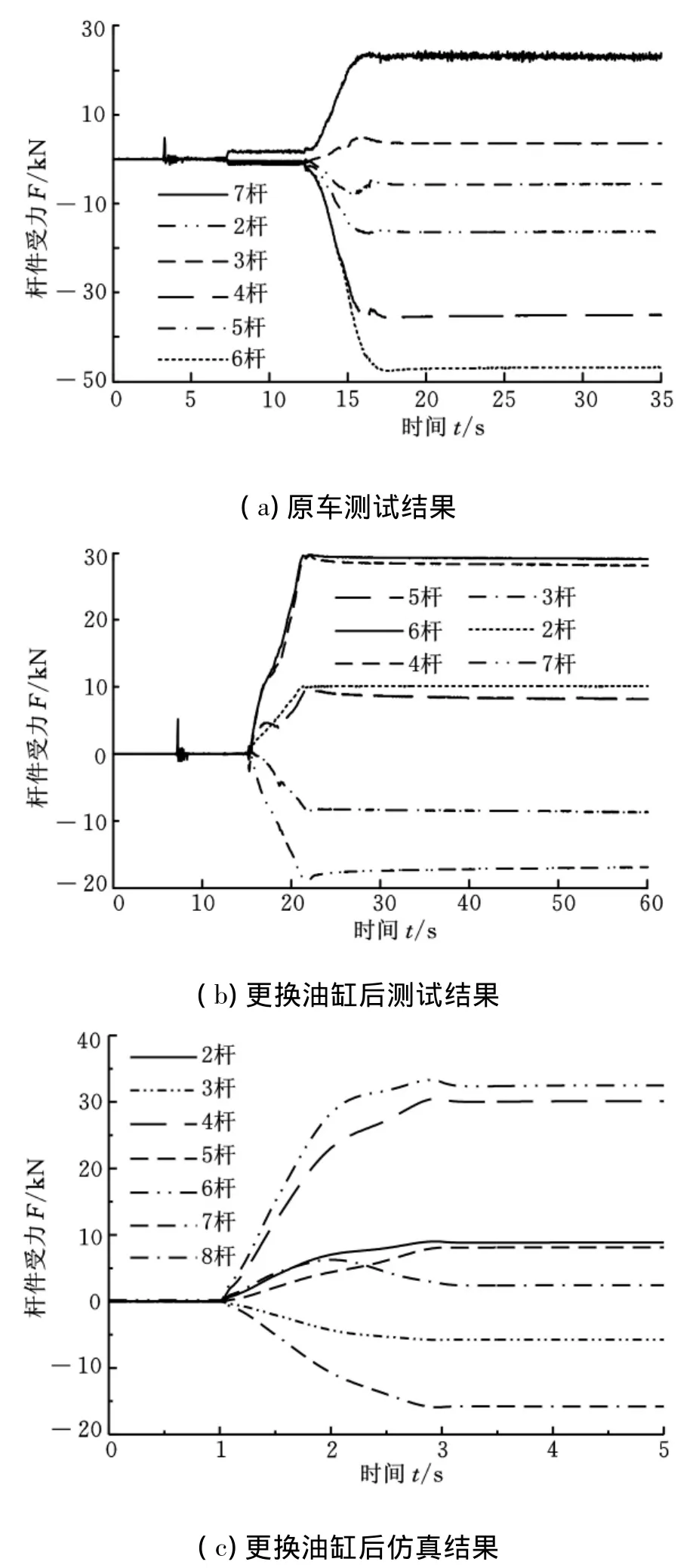
圖6 轉(zhuǎn)向桿系受力對比
4 轉(zhuǎn)向系統(tǒng)匹配優(yōu)化
4.1 轉(zhuǎn)向系統(tǒng)匹配優(yōu)化目標(biāo)
多軸液壓助力轉(zhuǎn)向系統(tǒng)的匹配設(shè)計(jì)的目標(biāo)是保證轉(zhuǎn)向過程中轉(zhuǎn)向桿系受力最小,轉(zhuǎn)向桿系受力的主要影響因素是轉(zhuǎn)向油缸輸出力與輪胎轉(zhuǎn)向阻力矩的匹配關(guān)系。因此,以各軸轉(zhuǎn)向搖臂輸出力的絕對值之和最小為目標(biāo)函數(shù):

其中,F(xiàn)g為轉(zhuǎn)向搖臂等效輸出合力;Fi為第i軸轉(zhuǎn)向搖臂輸出力,i=1,2,3;ζi為第 i軸轉(zhuǎn)向搖臂輸出力的加權(quán)因子,認(rèn)為其同等重要,取ζi=1。
4.2 優(yōu)化變量
由于轉(zhuǎn)向油缸的缸徑和桿徑是影響目標(biāo)函數(shù)的主要因素,因此,以各轉(zhuǎn)向油缸的缸徑和桿徑為優(yōu)化變量。各軸轉(zhuǎn)向油缸的缸徑變化范圍為40~80mm,桿徑變化范圍為10~40mm。
4.3 優(yōu)化分析
優(yōu)化算法是進(jìn)行優(yōu)化設(shè)計(jì)的重要工作。基于ADAMS軟件,采用軟件OPTDES_SQP優(yōu)化算法進(jìn)行優(yōu)化分析。圓整處理后的優(yōu)化結(jié)果如圖7所示。優(yōu)化后,轉(zhuǎn)向油缸的尺寸如表2所示。

圖7 優(yōu)化后的桿件受力
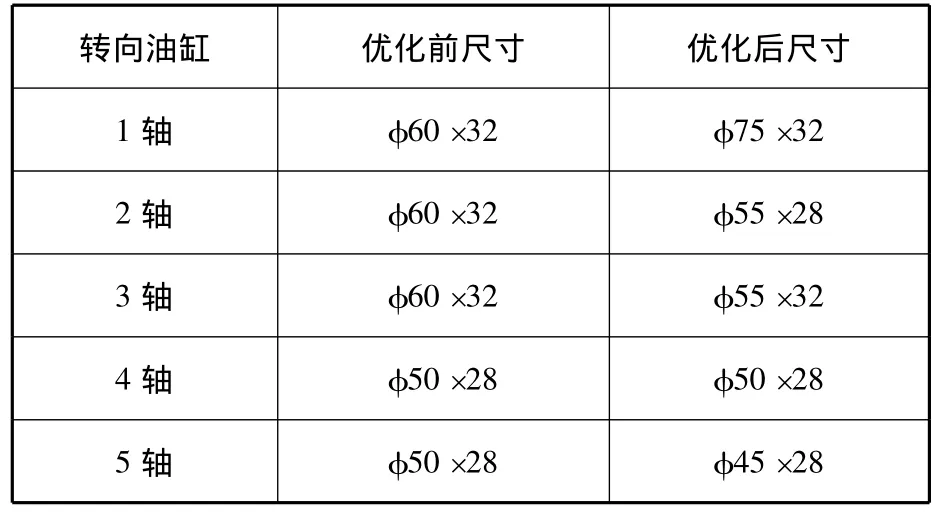
表2 優(yōu)化后轉(zhuǎn)向油缸尺寸 mm
從圖7所示的轉(zhuǎn)向桿系受力可以看出,優(yōu)化后,轉(zhuǎn)向桿系的受力明顯減小。另外,桿件受力減小后,部分桿件的受力發(fā)生較大波動,說明在轉(zhuǎn)向過程中,這些桿件出現(xiàn)了受力方向的改變。
[1] 張衛(wèi)東,莫旭輝,彭勁松.鐵水包車多軸轉(zhuǎn)向機(jī)構(gòu)運(yùn)動學(xué)分析與優(yōu)化[J].計(jì)算機(jī)仿真,2008,25(9):268-271.
Zhang Weidong,Mo Xuhui,Peng Jinsong. Analysis andOptimal Design of Kinematics for Multi - steeringSystem of Hydraulic Conveyance Vehicle [J ].Computer Simulation, 2008, 25( 9) : 268-271.
Beeley P R. Cast Steels for Tools and Dies: A Review[J]. The Brithish Foundryman,1986,24 ( 11) : 441 -445.
[3] 劉從華,趙斌,高秀華,等.多軸轉(zhuǎn)向車輛轉(zhuǎn)向機(jī)構(gòu)優(yōu)化設(shè)計(jì)[J].農(nóng)業(yè)工程學(xué)報,2007,23(9):81-85.
Liu Conghua, Zhao Bin, Gao Xiuhua, et al.Optimization Design of Multi - axle SteeringMechanism of Multi - axle Steering Vehicles [J].Transaction of the CSAE, 2007, 23( 9) : 81-85.
[4] Hou Yongping, Hu Yujin, Hu Diqing, et al.Synthesis of Multi - axle Steering System of Heavy -duty Vehicle Based on Probability of Steering Angle[C]/ /International Truck & Bus Meeting &Exposition. Portland,Oregon,USA,2000: 2000 -01 -3434.
[5] 石永林,胡于進(jìn),李成剛.多軸轉(zhuǎn)向載貨車轉(zhuǎn)向系基于最小半徑的優(yōu)化[J].專用汽車,2003(4):13-17.
Shi Yonglin,Hu Yujin,Li Chenggang. OptimizationBased on Minimal - radius for Multi - axis Vehicle’sSteering System[J]. Special Purpose Vehicle,2003( 4) : 13-17.
[6] 王云超,高秀華,張小江.重型多軸轉(zhuǎn)向車輛輪胎原地轉(zhuǎn)向阻力矩[J].農(nóng)業(yè)工程學(xué)報,2010,26(10):146-150.
Wang Yunchao,Gao Xiuhua,Zhang Xiaojiang. Researchon Static Steering Resisting Moment of Tire forHeavy Multi - axle Steering Vehicle[J]. Transaction ofthe CSAE, 2010, 26( 10) : 146-150.
[7] 王云超.多軸轉(zhuǎn)向車輛轉(zhuǎn)向性能研究[D].長春:吉林大學(xué),2007.
[8] Koo Shiang - Lung,Bu Fanping,Tan Han - Shue,etal. Vehicle Steering Control under the Impact of Low- speed Tire Characteristics[J]. Proceedings of the2006 American Control Conference, 2006,1( 6) : 4676-4681.
[9]Olatunbosun O A,Bolarinwa O. FE Simulation of theEffect of Tire Design Parameters on Lateral Forces andMoments[J]. Tire Science and Technology,2004,32( 3) : 146-163.
[10] 楊勇,易小剛.多軸起重機(jī)聯(lián)合仿真平臺開發(fā)[J].中國機(jī)械工程,2012,23(9):1074-1078.
Yang Yong,Yi Xiaogang. Co - simulation PlatformDevelopment for Multi - axle Crane[J]. China MechanicalEngineering, 2012, 23( 9) : 1074-1078.
Research on Matching Design of Multi - axle Hydraulic Assisted Steering System
WangYunchao1ZhangXiaojiang2ZhouMei1ZhengDongqiang1
1.JimeiUniversity,Xiamen,F(xiàn)ujian,361021 2.JilinUniversity,Changchun,130022
Steering linkage deformation or crack was prevalent in multi - axle hydraulic assisted steeringsystem. Based on a semi - empirical formula of tire static steering resistance moment,a mechanism - hydraulicco - simulation model of a multi - axle steering vehicle was built by ADAMS and AMESim software and thecorrectness was verified by experimental tests. Taking the minimum force of steering linkage as optimizationobjective, the matching relationship between hydraulic steering system and tire steering resistance moment wasoptimized. The research shows that the matching relationship has obvious effect on the steering linkage force.The steering linkage force is reduced significantly by matching optimization.
multi - axle steering; matching design; hydraulic assisted steering; tire static steeringresistance moment
U463.42
10.3969/j.issn.1004-132X.2013.10.025
2012—02—14
國家自然科學(xué)基金資助項(xiàng)目(51105171);福建省青年創(chuàng)新基金資助項(xiàng)目(2010J05118);集美大學(xué)優(yōu)秀青年骨干教師基金資助項(xiàng)目(2011B001)
(編輯 張 洋)
王云超,男,1976年生。集美大學(xué)機(jī)械工程學(xué)院副教授。主要研究方向?yàn)槎噍S轉(zhuǎn)向技術(shù)、工程機(jī)械數(shù)字化分析。出版著作3部,發(fā)表論文30篇。張小江,男,1979年生。吉林大學(xué)機(jī)械科學(xué)與工程學(xué)院講師。周 梅,女,1970年生。集美大學(xué)機(jī)械工程學(xué)院講師。鄭東強(qiáng),男,1978年生。集美大學(xué)機(jī)械工程學(xué)院講師。
猜你喜歡
英語世界(2022年9期)2022-10-18 01:11:18
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
金橋(2020年9期)2020-10-27 01:59:44
中學(xué)生數(shù)理化(高中版.高考理化)(2020年3期)2020-05-30 12:26:32
