便攜衛星天線精確定位研究
2013-02-01 02:33:26王民冉莉
中國科技信息 2013年7期
關鍵詞:衛星天線
王 民 冉 莉
南京中網衛星通信股份有限公司,江蘇南京 210032
便攜衛星天線精確定位研究
王 民 冉 莉
南京中網衛星通信股份有限公司,江蘇南京 210032
便攜衛星天線能否迅速準確地對星是便攜應急通信系統中的關鍵技術,傳統的方法難于同時解決對星系統的實時性和準確性,提出了以空間坐標變換的理論來求解衛星在天線載體坐標系下的位置角度,并運用基于IGRF和GPS的磁偏角計算方法,來修正天線航向角。實際應用證明,該方法能夠提高對星的速度和準確度,具有很好的可行性。
空間坐標變換;國際地磁參考場(IGRF);磁偏角修正;天線三大角度
引言
為了應對諸如森林火險、消防安全、電視轉播等突發事件中的應急通信,機動、靈活的衛星通信系統不可或缺,便攜衛星通信將是理想的選擇。為保證通信單元的工作,首先衛星天線要能快速、準確的對準所需衛星。所以對便攜衛星天線精確定位的研究有非常重要的意義。
本文提出基于空間坐標變換的理論,及運用基于IGRF和GPS的磁偏角計算方法修正到、天線初始航向角。使天線定位更加快速、準確。
1 天線三大理論角
由GPS測得天線所在地的經緯度后,天線的方位角、俯仰角和極化角可由以下經驗公式求得[1]:
天線方位角計算公式是:
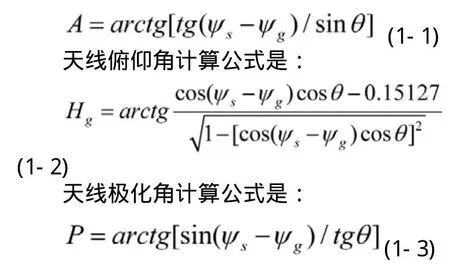
上述公式中的Ψs為衛星的經度,Ψg是天線所在地的經度,θ是天線所在地的緯度,所計算出的方位
角是以正南方向為基準的。
公式(1-1)計算出的A>0,則天線的指向為南偏東;A<0,則天線的指向為南偏西。地理坐標系下的天線方位角為:

2 空間坐標變換
2.1 天線對星轉角問題
由于應急通信車不可能總是停在水平面上,所以天線所在平面與水平地面存在不固定的夾角。使用上面所計算出的方位角、俯仰角、極化角,來控制天線就不一定能對準所需的衛星。如果能把衛星的上述3個角度轉化為相對天線所在平面的角度,那么就很容易控制天線轉到衛星所在位置,下面詳細探討了以空間坐標變換的方法來計算衛星在天線載體坐標系下的位置角度。
2.2 載體坐標系下的衛星天線方位角、俯仰角
針對上述2.1問題為了準確對星,必須要把地理坐標系變換到載體坐標系上。天線底座固連在載體上,所以選擇載體坐標系為:天線展開時的正前方為X軸的正向,垂直于天線底座上方為Z軸正向,以Z軸為轉軸,按右手法則確定Y軸方向。
地理坐標系到載體坐標系的空間變換可分解3次旋轉變換(旋轉過程遵循右手法則)[2]。首先地理坐標系繞Zg軸旋轉εz角,使地理坐標系的Xg軸和載體坐標系的XC重合,再繞地理坐標系的Xg軸旋轉εx角,使地理坐標系的Yg軸與載體坐標系的Yc軸重合,最后,繞地理坐標系的Yg軸旋轉εy角,使地理坐標系的Zg軸和載體坐標系的Zc軸重合。
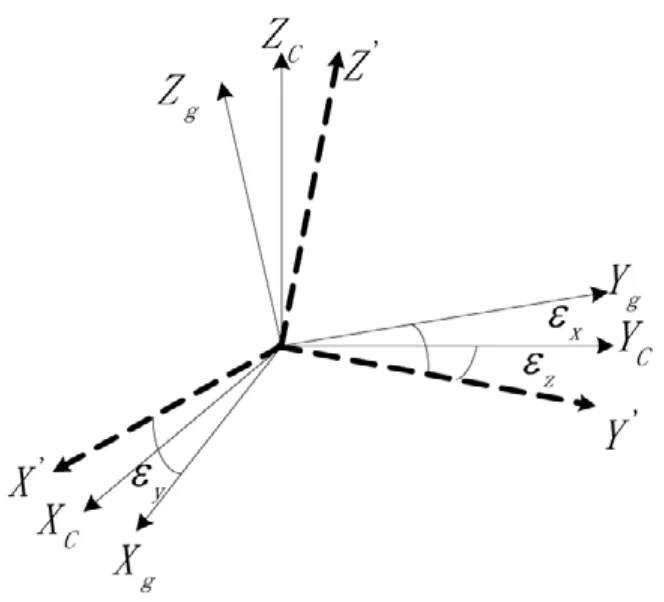
圖3 坐標旋轉示意圖
地理坐標系到載體坐標系的變換矩陣:
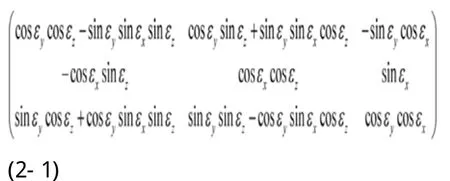
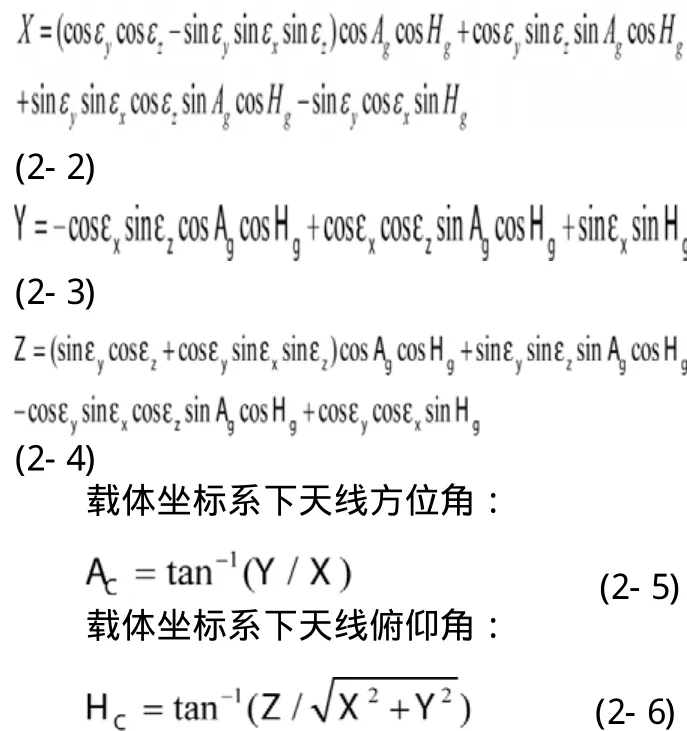
若地理坐標系下坐標(Xg,Yg,Zg),載體坐標系下同一點的坐標為(X,Y,Z)則得到
3 基于IGRF和GPS的磁偏角修正
針對磁偏角對電子羅盤航向角測量的影響,給出基于IGRF和GPS的磁偏角計算方法。
國際地磁參考場IGRF是國際地磁和高空物理協會于1970年制定的國際統一地磁模型。該模型基于高斯提出的理論,用球諧級數表示地磁基本場。IGRF是一張數表,包括球諧級數系數和系數年變化率,表上的參數為不同國家提出四種模型系數的加權平均值,每5年根據最新的測磁數據做一次更新。應用時,根據當前時間和系數年變化率求出當前時刻的級數系數,再把當前地點的經度、緯度和高度一同代入球諧級數,即可以求出該時該地的地磁偏角。
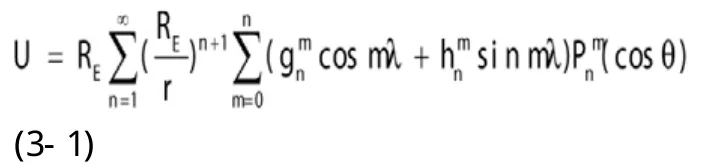
IGRF將地球上某一點Q處的磁位U表示為如下的球諧級數[3-4]:

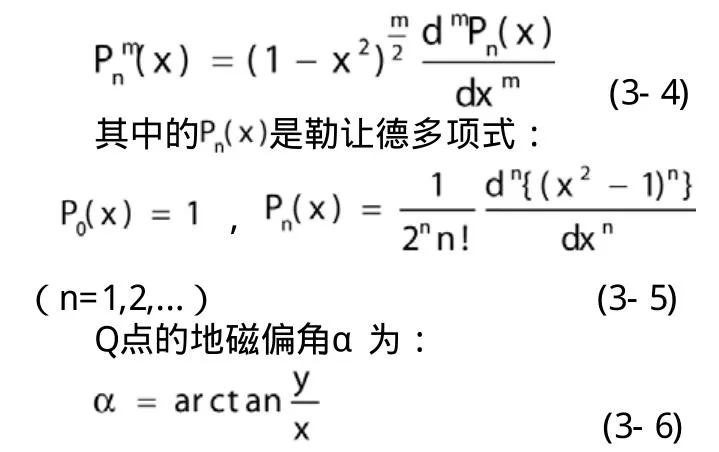
將Q點的磁位U對相應的坐標微分,可求得沿坐標軸x、y和z的場強分量如下[5]:
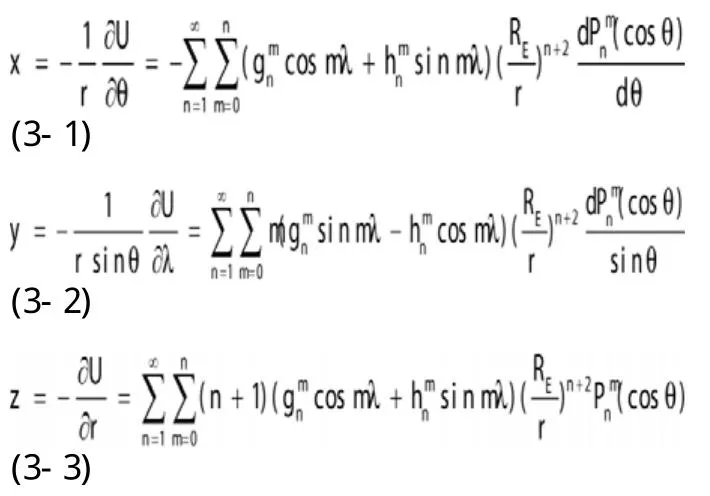
其中經度、緯度和高度由GPS獲得。
4 結語
便攜衛星天線的準確對星是便攜應急通信系統中的關鍵一環,本文對便攜衛星天線自動對星系統中的關鍵點進行了探討,提出了以空間坐標變換的理論來求解衛星在天線載體坐標系下的位置角度,和基于IGRF和GPS的磁偏角計算方法,來修正天線航向角,提高了對星的速度和準確度。通過試驗測試,運用該理論方法完全可以精確對準所需衛星。
[1]王秉鈞等.現代衛星通信系統[M].北京:電子工業出版社,2004
[2]朱華統,楊元喜,呂志平.GPS坐標系統的變換[M].北京:測繪出版社出版,1994
TP301.6
A
10.3969/j.issn.1001-8972.2013.07.044
王民(1978-).男,河南駐馬店人,南京中網衛星通信股份有限公司,研究方向為控制理論與控制工程。
猜你喜歡
科技傳播(2019年22期)2020-01-14 03:06:28
同濟大學學報(自然科學版)(2018年10期)2018-11-02 07:17:24
北京航空航天大學學報(2017年5期)2017-11-23 05:54:08
移動信息(2016年9期)2016-12-31 09:31:33
北京航空航天大學學報(2016年12期)2016-02-27 06:32:37
衛星與網絡(2016年12期)2016-02-05 09:23:28
西部廣播電視(2015年7期)2016-01-16 03:45:17
科技傳播(2015年16期)2015-10-24 20:03:06
科教導刊(2015年21期)2015-08-05 16:51:05
衛星與網絡(2013年1期)2013-06-05 08:21:58
