運(yùn)動影像測量方法的誤差研究
2013-02-21 07:17:38嚴(yán)波濤郝衛(wèi)亞
中國體育科技 2013年4期
關(guān)鍵詞:測量
賈 誼,嚴(yán)波濤,郝衛(wèi)亞
1.North University of China,Taiyuan 030051,China;2.Xi′an Physical Education University,Xi′an 710068,China;3.China Institute of Sport Science,Beijing 100061,China.
1 前言
運(yùn)動影像測量方法是體育科研工作者了解人體動作技術(shù)規(guī)律的重要方法,其具有一定的廣泛性和延續(xù)性,當(dāng)我們將其作為量化分析的工具應(yīng)用于科學(xué)研究時,則更應(yīng)該重視其測量結(jié)果的可靠性。
縱觀國內(nèi)外相關(guān)領(lǐng)域的研究不難發(fā)現(xiàn),運(yùn)動影像測量方法的誤差來源主要有系統(tǒng)誤差和隨機(jī)誤差兩大類。系統(tǒng)誤差的大小與所使用的實(shí)驗(yàn)儀器、設(shè)備、測量環(huán)境以及測量方法有關(guān)。測量方案一旦確定,系統(tǒng)誤差就是一個恒量。Li(1990)[23]和 Martin(1974)等人[24,25]認(rèn)為,透視誤差是平面拍攝的主要系統(tǒng)誤差源之一,并提出了透視誤差的修正公式;Sih[19]以及 Mont[26]等人,則利用非影像測 量 數(shù)據(jù)對透視誤差進(jìn)行了修正。平面定機(jī)拍攝的另外一種主要系統(tǒng)誤差源是鏡頭畸變誤差。Roger(2002)[29]、盧德明(2001)[8]以 及 鄭 秀 媛 (2002)[17]等 人 ,都 曾 提 出 了 鏡 頭 畸變誤差對測量結(jié)果的影響,但并沒有對其進(jìn)行進(jìn)一步的量化分析。此外,運(yùn)動場地不平和主光軸傾斜造成的成像誤差也被認(rèn)為是平面拍攝的系統(tǒng)誤差來源[8,17],我國學(xué)者盧青(1984)[9]和 安 朝 臣 (1985)[1]曾 對 上 述 兩 項(xiàng) 誤 差 源 進(jìn) 行了量化分析,并給出了修正公式。還有一些系統(tǒng)誤差也會對測量結(jié)果產(chǎn)生影響,例如,標(biāo)尺和標(biāo)定框架的加工、磨損等因素帶來的誤差[8];圖像分辨率誤差和成像大小測定誤差等[27]。表1對平面定機(jī)拍攝誤差來源進(jìn)行了歸納。
對于立體定機(jī)拍攝,可在一定程度上克服由于透視誤差和場地不平等因素帶來的影響。而立體定機(jī)拍攝的系統(tǒng)誤差主要是在對物坐標(biāo)進(jìn)行重構(gòu)時產(chǎn)生的重構(gòu)誤差。重構(gòu)誤差與攝像機(jī)的位置擺放、標(biāo)定點(diǎn)的數(shù)量和分布[15]以及標(biāo)定空間的范圍[17]等因素相關(guān)。表2列出了一些研究者在不同測試條件下,對固定標(biāo)志物測量得到的立體定機(jī)拍攝系統(tǒng)誤差值。

表1 平面定機(jī)攝影攝像測量各項(xiàng)誤差匯總情況一覽表Table 1 Errors Collection of Two-Dimensional Imaging

表2 不同測試條件下的立體定機(jī)拍攝測量精度一覽表Table 2 Precision of Three-Dimensional Imaging in Different Measurement Condition
運(yùn)動影像測量中的隨機(jī)誤差則可能來自于電子器件的噪音、人體標(biāo)志點(diǎn)不清晰[19]以及來自解析過程本身的誤差[20]。其中,解析人員對人體關(guān)節(jié)點(diǎn)的判讀誤差被認(rèn)為是主要的隨機(jī)誤差源[12,5]。有學(xué)者提出,不同解析員對關(guān)節(jié)點(diǎn)的判讀誤差可導(dǎo)致得到的數(shù)據(jù)之間沒有可比性[28]。
綜上所述,運(yùn)動影像測量過程中的誤差來源對測量結(jié)果影響較大,甚至?xí)?dǎo)致得到錯誤的研究結(jié)論。而目前關(guān)于此方面的研究又多集中于測量過程中的某個(些)環(huán)節(jié),并不具有系統(tǒng)性,因此也就無法了解最后得到的測量結(jié)果中誤差成分所占的比例究竟如何。本研究采用實(shí)驗(yàn)測試結(jié)合實(shí)例分析的方法,首先對測量過程中的主要誤差源及誤差范圍進(jìn)行測試,并在此基礎(chǔ)上,以競走項(xiàng)目比賽現(xiàn)場的視頻資料為實(shí)例,以誤差合成理論為依據(jù),提出運(yùn)動影像測量過程的誤差合成計(jì)算方法,得到各誤差源以及總的誤差范圍,使研究者對自己的研究結(jié)果做到心中有數(shù)。
2 研究方法
2.1 實(shí)驗(yàn)儀器
本研究中所使用的實(shí)驗(yàn)儀器包括:1)Pulinx TM-6710CL黑白循環(huán)掃描 CCD;2)AVENIR TV ZOOM LENS SL08551手動變焦鏡頭;3)Panasonic AG-DVC180MC常速攝像機(jī);4)CASIO FH25高速攝像機(jī);5)愛捷三維標(biāo)定框架;6)自制測量用標(biāo)志點(diǎn);7)APAS錄像解析軟件;8)其他輔助材料,如鋼卷尺、游標(biāo)卡尺、標(biāo)桿、膠布等。
2.2 拍攝方法及拍攝對象
本研究主要針對平面定機(jī)拍攝和立體定機(jī)拍攝方法進(jìn)行研究。對靜態(tài)已知長度標(biāo)志點(diǎn)及標(biāo)定框架等標(biāo)志物進(jìn)行拍攝。用于實(shí)例分析的技術(shù)錄像拍攝于2011年太倉國際競走挑戰(zhàn)賽女子20km競走項(xiàng)目的比賽現(xiàn)場,并對其中一名運(yùn)動員的一個復(fù)步技術(shù)動作分別進(jìn)行平面定機(jī)拍攝和立體定機(jī)拍攝。
2.3 數(shù)據(jù)處理與分析
所有的數(shù)據(jù)處理、數(shù)值運(yùn)算以及統(tǒng)計(jì)學(xué)分析均在EXCEL軟件和SPSS 13.0軟件中完成,具體計(jì)算和統(tǒng)計(jì)方法將在結(jié)果與分析中分別進(jìn)行說明。
3 實(shí)驗(yàn)結(jié)果
3.1 鏡頭畸變誤差的測量結(jié)果
一旦拍攝方案確定下來,則表1中所列誤差大小既已確定,但由于鏡頭畸變誤差還和鏡頭的制造加工、鏡頭焦距等因素相關(guān),需要進(jìn)行專門的實(shí)驗(yàn)測試才能確定畸變量。因此,為能將鏡頭畸變誤差項(xiàng)加入到最后的誤差總合計(jì)算當(dāng)中,本研究對三種不同的鏡頭進(jìn)行了畸變量測試。鏡頭1為CASIO FH25高速攝像機(jī)自帶普通長焦鏡頭;鏡頭2為日本產(chǎn) AVENIR TV ZOOM LENS鏡頭;鏡頭3為PanasonicDVG180A常速攝像機(jī)自帶LEICA DICOAR鏡頭(鏡頭參數(shù)如表3所示)。

表3 本研究測試用鏡頭參數(shù)一覽表Table 3 Parameters of Measurement Lens
具體測試過程如下:在經(jīng)過矯直的直線上每隔20cm設(shè)置一個標(biāo)志點(diǎn)。本實(shí)驗(yàn)中采用的是人工標(biāo)志點(diǎn),黑白相間,大小為10cm×10cm×10cm(圖1),標(biāo)志醒目、清晰,便于量測和成像。用游標(biāo)卡尺對標(biāo)志點(diǎn)間距進(jìn)行實(shí)測。用三種不同鏡頭分別對標(biāo)志點(diǎn)進(jìn)行定點(diǎn)定焦拍攝,攝像機(jī)鏡頭垂直于拍攝平面,機(jī)高設(shè)為1.2m。最后將視頻用圖形圖像處理軟件進(jìn)行解析,并將解析結(jié)果與實(shí)測值進(jìn)行比較。為使測試結(jié)果更加可靠,取10次解析的均值進(jìn)行分析。

圖1 本研究拍攝用標(biāo)志點(diǎn)示意圖Figure 1. Marker Point in Shooting
由圖2可知,在畫面中央3/5處,三種鏡頭的畸變誤差值之間沒有顯著性差異,而在畫面邊緣2/5處AVENIR TV ZOOM LENS鏡頭的畸變誤差明顯小于其他兩種。說明不同鏡頭在畫面中央處都表現(xiàn)出比較穩(wěn)定的性能,而在畫面邊緣處則差異較大。從三種鏡頭各段的誤差均值及誤差百分比結(jié)果來看,CASIO FH25鏡頭在邊緣處的誤差值較大,為19.9mm,誤差百分比為4.1%。LEICA DICOAR鏡頭最小,為2.8%。
從理論上分析,越靠近畫面邊緣,畸變誤差越大。而實(shí)驗(yàn)的結(jié)果也驗(yàn)證了這一規(guī)律。不論使用何種鏡頭,畫面中央3/5范圍內(nèi)解析誤差值都維持在較低水平(誤差最大值為4.9mm)。這意味著在取景范圍為5m的情況下,應(yīng)盡量將人體圖像控制在畫面中間約3m范圍內(nèi),這樣可以保證誤差百分比維持在0.2%~0.8%的較低水平上,而超出這一范圍,則誤差會明顯增加。

圖2 本研究三種鏡頭畸變誤差比較圖Figure 2. Comparison of Distortion Errors of Three Lens
3.2 立體定機(jī)拍攝的重構(gòu)誤差
本研究對動作技術(shù)分析中較為常用的愛捷輻射式標(biāo)定框架進(jìn)行重構(gòu)誤差測試。標(biāo)定范圍為2.5m3,標(biāo)定點(diǎn)數(shù)量25個,呈輻射式均勻分布。采用兩臺CASIO FH25攝像機(jī)對標(biāo)定框架進(jìn)行拍攝。拍攝時,兩攝像機(jī)位置保持左右對稱,拍攝基線每增加1m,即對標(biāo)定框架拍攝一次。基線長度由1m增至60m,共拍攝60次。拍攝現(xiàn)場如圖3所示。

圖3 本研究攝影基線誤差實(shí)驗(yàn)現(xiàn)場拍攝示意圖Figure 3. Error Testing Scene of Imaging Baseline
數(shù)據(jù)處理:使用Ariel圖像解析軟件,解析處理拍攝得到的60個立體像對。對標(biāo)定框架上25個標(biāo)定點(diǎn)坐標(biāo)進(jìn)行重構(gòu),為了盡量減小隨機(jī)誤差,對每個像對解析5次取平均值。將解析得到的標(biāo)定點(diǎn)坐標(biāo)與標(biāo)定框架出廠時的原始坐標(biāo)進(jìn)行計(jì)算比較,得到X、Y、Z三個方向的誤差值。

表4 本研究不同基線長度下標(biāo)定框架三個軸方向的總體誤差情況統(tǒng)計(jì)Table 4 Total Errors of Three Axis Directions in Different Imaging Baseline Length (mm)
表4是X、Y、Z三個方向的總體誤差情況,從總體均值情況來看,Y方向(與拍攝基線垂直方向)的誤差最大,平均為4.0mm;其次為X軸方向(與拍攝基線平行方向);Z軸方向(與地面垂直方向)的誤差均值僅為1.8mm。在三個軸方向當(dāng)中,Y方向的誤差均值明顯大于X軸和Z軸,且隨拍攝基線增加而減小(如圖4所示),說明Y方向測量精度受景深變化的影響較大。當(dāng)攝像機(jī)主光軸夾角較小時,Y方向測量精度將明顯降低,而X方向則表現(xiàn)出相反的趨勢。另外,Z軸方向的誤差值在基線長度增加時呈遞增趨勢(圖4),可以認(rèn)為拍攝距離是影響Z軸方向測量精度的主要因素。

圖4 本研究不同基線長度對測量精度的影響示意圖Figure 4. Influence for the Precision about Different Baseline Length
3.3 對各誤差源進(jìn)行誤差合成
本節(jié)內(nèi)容將以競走項(xiàng)目為例,對平面定機(jī)拍攝和立體定機(jī)拍攝過程中的主要誤差來源進(jìn)行合成,給出不同拍攝條件下的誤差范圍。用于分析的視頻資料拍攝于2011年江蘇省太倉市舉行的國際競走挑戰(zhàn)賽比賽現(xiàn)場。拍攝及解析參數(shù)如下:平面定機(jī)拍攝使用一臺CASIO FH25攝像機(jī),主光軸垂直于運(yùn)動平面,攝距10m,機(jī)高1.2m,拍攝頻率120Hz,圖像分辨率640×480像素,拍攝范圍5m,拍攝畫幅數(shù)為53幅。使用APAS運(yùn)動圖像解析軟件進(jìn)行解析,使用AOCe950S19英寸顯示器,水平方向固有像素值為1440;利用游標(biāo)卡尺對電腦屏幕中標(biāo)尺標(biāo)志點(diǎn)所測距離為0.115m,比賽現(xiàn)場標(biāo)志點(diǎn)間距為2.5m,成像比例為1∶21.7。
3.3.1 平面定機(jī)拍攝的誤差合成
當(dāng)測量結(jié)果中既含有系統(tǒng)誤差成分,又含有隨機(jī)誤差成分時,我們通常用極限誤差來表示測量后的總誤差范圍。根據(jù)誤差合成理論[3],若測量過程中有s個未定單項(xiàng)系統(tǒng)誤差和q個單項(xiàng)隨機(jī)誤差,他們總的極限誤差為:

其中,Δi為某單項(xiàng)已定系統(tǒng)誤差的極限誤差;ai為誤差傳遞系數(shù);ei為某單項(xiàng)未定系統(tǒng)誤差的極限誤差;δi為某單項(xiàng)隨機(jī)誤差的極限誤差;n為重復(fù)測量次數(shù)。在本例中,由于操作儀器固定,因此已定系統(tǒng)誤差可以認(rèn)為是由圖像分辨率誤差和成像大小測定誤差構(gòu)成:

另外,由于拍攝方案已經(jīng)確定,誤差傳遞系數(shù)ai即可通過表1中的計(jì)算式確定。我們假定解析點(diǎn)距離標(biāo)定平面0.2m,則誤差傳遞系數(shù)為:

由于鏡頭畸變誤差是隨測量點(diǎn)與標(biāo)定中心距離變化而變化的,屬未定系統(tǒng)誤差,計(jì)算時分別取測量點(diǎn)距離標(biāo)定中心不同位置時(分5段)的畸變誤差的標(biāo)準(zhǔn)差:

根據(jù)標(biāo)準(zhǔn)差求各段畸變誤差的極限誤差。所謂極限誤差[3],是指測量結(jié)果的誤差不超過該極限誤差的概率為P,并使差值(1-P)可以忽略。極限誤差的表達(dá)式為:

式中ta為置信系數(shù),它由給定的置信概率P=1-a和自由度v=n-1來確定。σx為算術(shù)平均值的標(biāo)準(zhǔn)差。在本研究中,已知v=n-1=9,取α=0.01,則ta=3.25;將上述值代入公式(2)得:

在本例中,隨機(jī)誤差δi則由兩個部分組成,一部分為多次人工解析的隨機(jī)誤差,另一部分為原始數(shù)據(jù)進(jìn)行平滑后的殘差值。為計(jì)算多次人工解析誤差,由同一解析員重復(fù)解析5次獲得人體各關(guān)節(jié)點(diǎn)的原始坐標(biāo),采用低通濾波法對原始數(shù)據(jù)平滑,利用殘差分析[30]法確定了截?cái)囝l率選擇9.83Hz,其中,殘差值的具體計(jì)算公式為:

其中,R為殘差值,fc為截?cái)囝l率,Xi為原始數(shù)據(jù),^Xi為平滑后的數(shù)據(jù),N為采樣數(shù)量,即所解析的畫幅數(shù)。在本例中,所拍攝視頻畫幅數(shù)為53幅,即N=53。將先前得到的計(jì)算結(jié)果以及利用公式(3)計(jì)算得到的人體右膝關(guān)節(jié)點(diǎn)殘差值代入公式(1)得:

以此方法,可以對所有19個人體標(biāo)志點(diǎn)的位移參數(shù)進(jìn)行誤差合成,結(jié)果如圖5所示。其中,誤差極值最小是右側(cè)肩關(guān)節(jié)點(diǎn)Y軸方向±14.9mm,最大值在左手X軸方向±82.6mm。重心合成后的極值誤差X軸方向?yàn)椤?7.1mm,Y軸方向?yàn)椤?8.7mm。

圖5 平面定機(jī)拍攝人體標(biāo)志點(diǎn)位移參數(shù)的總極限誤差圖Figure 5. Total Limiting Errors of Human Marker’s Displacement Parameters in Two-Dimensional Imaging
3.3.2 立體定機(jī)拍攝的誤差合成
對立體影像測量的誤差合成,選擇本次比賽女子20 km某運(yùn)動員第2圈的一個單步技術(shù)動作為研究對象,兩機(jī)拍攝距離為10m和15m,攝影基線(兩機(jī)間距)為15 m,主光軸夾角約70°,拍攝頻率為60Hz,一個單步動作共35幅畫面,由同一解析員在APAS圖像解析軟件中對視頻圖像重復(fù)解析5次。在進(jìn)行誤差合成時,系統(tǒng)誤差包括已定系統(tǒng)誤差(圖像分辨率誤差和成像大小測定誤差)以及未定系統(tǒng)誤差(重構(gòu)誤差);而隨機(jī)誤差仍取多次人工解析的隨機(jī)誤差以及原始數(shù)據(jù)平滑后的殘差值。其中,在成像大小測定誤差的計(jì)算中,測得成像比例尺為1∶18.1。拍攝現(xiàn)場如圖6所示。
各極限誤差的計(jì)算方法與平面定機(jī)拍攝的誤差計(jì)算方向相同,以下是對運(yùn)動員右膝關(guān)節(jié)點(diǎn)X軸方向位移參數(shù)的誤差合成計(jì)算:


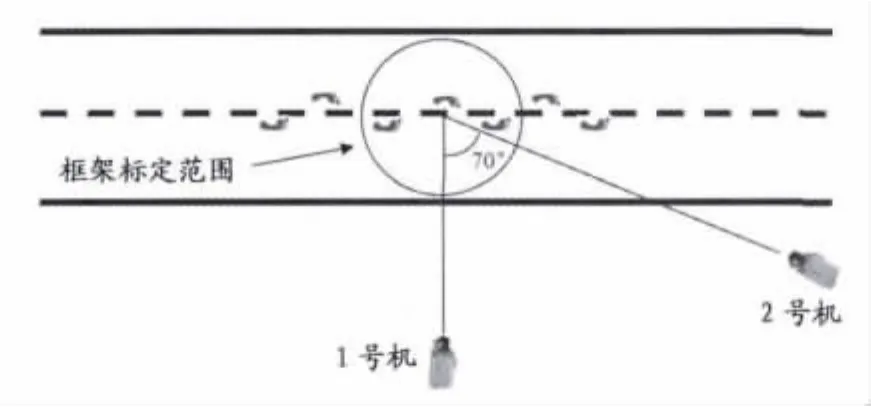
圖6 立體定機(jī)拍攝現(xiàn)場示意圖Figure 6. Diagrammatic Sketch of Three-Dimensional Imaging
由計(jì)算結(jié)果可知,解析結(jié)果中重心在X軸方向上的極限誤差為8.05±4.9mm。圖7是人體各關(guān)節(jié)點(diǎn)的位移參數(shù)極限誤差值統(tǒng)計(jì)。在對平面和立體攝影測量方法的精度進(jìn)行比較后發(fā)現(xiàn),兩種測量方法中,除個別被測點(diǎn)之外,其他被測點(diǎn)的極限誤差值都基本保持在30mm以下。
4 討論
從本研究的實(shí)驗(yàn)結(jié)果看,攝像機(jī)的畸變差對測量結(jié)果的精度有著較大的影響,尤其在圖像邊緣處。所以計(jì)算中必須考慮畸變差這一項(xiàng)。修正畸變通常使用的方法是基于圖像畸變校正法,有網(wǎng)格標(biāo)定法[11]、線陣激光標(biāo)定法[7]等。羅紅娥等人(2009)[10]的研究結(jié)果發(fā)現(xiàn),經(jīng)過修正后,畸變誤差可由5mm減小到0.9mm。而孫大雁等人(2010)[14]通過修正算法修正后,可將圖像相對精度提高40%以上。雖然上述研究可以證明,通過特定的修正算法可以對鏡頭畸變誤差進(jìn)行有效的修正,但各算法的計(jì)算過程比較復(fù)雜,需在特定的實(shí)驗(yàn)條件下對特制的標(biāo)志物進(jìn)行拍攝。更重要的是,在不同鏡頭、物距、焦距、像距和環(huán)境等條件下,還要對修正系數(shù)進(jìn)行重新計(jì)算。這些因素使得對鏡頭畸變誤差的修正無法滿足運(yùn)動影像測量方法快速處理和反饋的要求。因此,亟待提出一種快速有效的運(yùn)動影像測量畸變誤差修正方法來解決這一問題。而目前的圖形圖像處理軟件和批處理技術(shù)為解決這一問題提供了可能[4]。

圖7 立體定機(jī)拍攝人體標(biāo)志點(diǎn)位移參數(shù)的總極限誤差示意圖Figure 7. Total Limiting Errors of Human Marker’s Displacement Parameters in Three-Dimensional Imaging
對于立體定機(jī)拍攝的重構(gòu)誤差問題,不少學(xué)者也曾做過類似研究(表2)。本研究是在改變基線長度的基礎(chǔ)上進(jìn)行的測量,其實(shí)質(zhì)是攝像機(jī)拍攝夾角的變化對測量結(jié)果的影響。與以往單純改變攝像機(jī)夾角進(jìn)行拍攝的研究不同的是,在基線所在平面與標(biāo)定框架X軸所在平面的垂直距離不變的情況下,基線長度的改變不但可以使我們了解到攝像機(jī)夾角變化對重構(gòu)誤差的影響,還可以使我們更好地理解攝像機(jī)機(jī)位變化分別對標(biāo)定空間內(nèi)XYZ三個方向精度的影響程度。
在對各誤差源進(jìn)行合成后,我們可以得到不同測量方法的誤差范圍,這一誤差范圍是綜合了拍攝過程和解析過程中所有主要誤差來源而進(jìn)行的合成計(jì)算結(jié)果。可以看出,兩種測量方法的誤差范圍在數(shù)值上沒有太大差別,不論何種方法,絕大多數(shù)測量點(diǎn)的絕對誤差值都在30mm以下,說明測量結(jié)果具有較好的穩(wěn)定性。而對極限誤差值超過30mm的被測點(diǎn)進(jìn)行分析后發(fā)現(xiàn),這些點(diǎn)在拍攝過程中都出現(xiàn)了被遮擋的情況,這很有可能是造成其測量精度下降的原因。
5 結(jié)論
1.從上述實(shí)驗(yàn)及分析結(jié)果來看,影像測量過程中的誤差來源成分較為復(fù)雜。其中一些誤差源的影響較小,可以忽略;但有些誤差如果不加以控制,則會對測量結(jié)果產(chǎn)生較大影響。
2.鏡頭畸變誤差,尤其在圖像邊緣處,是影響測量精度的一個重要因素,需要引起研究者足夠的重視。雖然此誤差源不能完全消除,但可以在一定程度上減小其對測量結(jié)果的影響。另外,在立體定機(jī)拍攝時,攝像機(jī)位置的改變對標(biāo)定空間不同坐標(biāo)軸方向的測量精度影響程度不同。
3.對運(yùn)動影像測量過程中的各誤差源,可以通過誤差合成的理論與方法進(jìn)行合成計(jì)算。通過誤差合成計(jì)算,平面定機(jī)拍攝與立體定機(jī)拍攝條件下,對人體標(biāo)志點(diǎn)位移參數(shù)的測量精度基本都維持在同一精度范圍內(nèi)。
[1]安朝臣.影像測量減少誤差的方法[J].四川體育科學(xué),1985,5(2):11-13.
[2]杜艷艷,侯曼,蔡宇輝.輻射式框架進(jìn)行三維重構(gòu)的精度分析[J].體育科研,2006:27(2):83-86.
[3]費(fèi)業(yè)泰.誤差理論與數(shù)據(jù)處理[M].北京:機(jī)械工業(yè)出版社,2005:70-71.
[4]賈誼,嚴(yán)波濤,劉占峰,等,運(yùn)動影像分析中對鏡頭畸變的快速修正方法及應(yīng)用實(shí)例[J].中國體育科技,2012,48(1):24-31.
[5]李良標(biāo).影片解析中人體測量點(diǎn)的確定方法[J].體育科學(xué),1991,11(3):56-63.
[6]李旭鴻,侯曼.DLT算法中框架位置對三維重構(gòu)精度的影響[J].體育科研,2005:26(5):73-75.
[7]凌偉,王志乾,高峰端.光電測量系統(tǒng)畸變的實(shí)時數(shù)字校正[J].光學(xué)精密工程,2007,15(2):277-282.
[8]盧德明.運(yùn)動生物力學(xué)測量方法[M].北京:北京體育大學(xué)出版社,2001.
[9]盧青.高速攝影影片數(shù)據(jù)的誤差源及其處理方法(一)[J].體育與科學(xué),1984,5(1):21-24.
[10]羅紅娥,陳平,顧金良,等.線陣CCD測量系統(tǒng)的鏡頭畸變校正新方法[J].半導(dǎo)體光電,2009,30(3):441-443.
[11]閔華松,姜靖.全自動數(shù)字圖像畸變校正算法及其DSP實(shí)現(xiàn)[J].機(jī)器視覺,2007,(5):108-110.
[12]P·W·小肯尼迪;D·L·懷特,G·A·史密斯等.攝影和攝像技術(shù)三維直接線性變換(DLT)再現(xiàn)精度的比較[J].山東體育科技,1990,12(4):58-60.
[13]錢競光,盧青,蔡國鈞,等.關(guān)于用解析儀分析體育動作所產(chǎn)生誤差的探討[J].江蘇體育科技,1984,(2):10-12.
[14]宋鵬,秦志輝,黃承佳,等.改變拍攝夾角對三維運(yùn)動圖像解析系統(tǒng)框架精度的影響研究[J].西南師范大學(xué)學(xué)報(bào)(自然科學(xué)版),2011,36(1):235-239.
[15]孫大雁,李永奎,趙萍,等.三維測量中相機(jī)鏡頭畸變修正算法的研究[J].農(nóng)業(yè)科技與裝備,2010,(2):28-30.
[16]楊年峰,王季軍,黃昌華,等.直接線性變換法中標(biāo)定對三維重構(gòu)精度的影響[J].清華大學(xué)學(xué)報(bào)(自然科學(xué)版),2000:40(4):24-27.
[17]鄭秀媛.現(xiàn)代運(yùn)動生物力學(xué)[M].北京:國防工業(yè)出版社,2002:27-28.
[18]鄭義.攝像測量方法的誤差比較與分析[M].北京:北京體育大學(xué),2007:44-45.
[19]B L SIH,M HUBBARD,K R WILLIAMS.Correcting out-of-plane errors in two-dimensional imaging using nonimagerelated information[J].J Biomechanics,2001,34(2):257-260.
[20]DELLA CROCE U,CAPPOZZO A.A spot-check for estimating stereo photogrammetric errors[J].Med Biol Eng Comput,2000,38:260-266.
[21]FUMéE H.Three-dimensional analysis of human locomotion[M].New York:Wiley,1997:136-137.
[22]JAMES G.Richards.The measurement of human motion:A comparison of commercially available systems[J].Human Move Sci,1999,18:589-602.
[23]LI J A,BRYANT J T,STEVENSON J M.Single camera photogrammetric technique for restricted 3Dmotion analysis[J].J Biomedical Enginee,1990,12(1):69-74.
[24]MARTIN T P,PONGRATZ M B.Mathematical correction for photographic perspective error[J].Res Q,1974,45:318-323.
[25]MARTIN T P,PONGRATZ M B.Validation of a mathematical model for correction of photographic perspective error[M].Pennsylvania:University Park,1974:469-470.
[26] MONT HUBBARD,NEVILLE J DE MESTRE,JOHN SCOTT.Dependence of release variables in the shot put[J].J Biomech,2001,34(4):449-456.
[27]P GRIMSHAW,A LEES,N FOWLER.Sport and Exercise Biomechanics[M].NewYork:Taylor Francis Group,2007.
[28]ROGER BARTLETT,MELANIE BUSSEY,NICK FLYGER.Movement variability cannot be determined reliably from nomarker conditions[J].J Biomech,2006,39(16):3076-3079.
[29] ROGER BARTLETT.Introduction to Sports Biomechanics[M].New York:Taylor Francis Group,1997:170-171.
[30]WINTER D.Biomechanics and motor control of human movement[M].New York:Wiley,2009:70-71.
[31]Y EHARA,H FUJIMOTO,S MIYAZAKI,et al.Comparison of the performance of 3-D camera systems I[J].Gait Posture,1995,3(3):166-169.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年5期)2021-07-22 02:40:06
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學(xué)少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學(xué)少年(2017年2期)2017-04-26 21:58:43
中學(xué)生數(shù)理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學(xué)低年級版)(2015年4期)2015-04-29 00:00:00
