圖形推演中線狀目標的爬行效果研究
2013-02-21 07:52:42竇長旭
網絡安全與數據管理 2013年5期
聶 穎,竇長旭
(中國電子科技集團公司第十五研究所 地理信息與圖形圖像技術研發中心,北京 100083)
隨著計算機信息化手段的日益普及和發展,以矢量圖形動畫實現為核心的圖形推演技術已被廣泛地應用于仿真模擬、情況匯報和態勢推演等各類軍事應用中,以達到幫助使用者更好地展示仿真過程、匯報值班情況或推演作戰謀劃的目的[1]。
圖形推演主要負責完成目標和場景的動態表達定義和演播,是圖形處理平臺的一個組成部分,其依托于圖形數據管理和圖形符號庫,為最終上層應用提供圖形動畫支撐,是態勢推演應用的關鍵部分。目前,許多動畫推演和圖形處理類的軟件[2-3]都具備了圖形推演的基本能力,基本都實現了目標基本動作的設計,但對動作動畫效果的精細性和準確性缺少深入的研究,往往止步于示意階段。本文將介紹圖形推演在線目標移動效果方面的研究成果。
1 系統概述
圖形推演的系統結構如圖1所示,分為核心處理和應用兩個層次,核心處理層負責數據的生成、顯示、驅動和控制,應用層負責提供操縱目標數據和動態數據的各類界面操作。
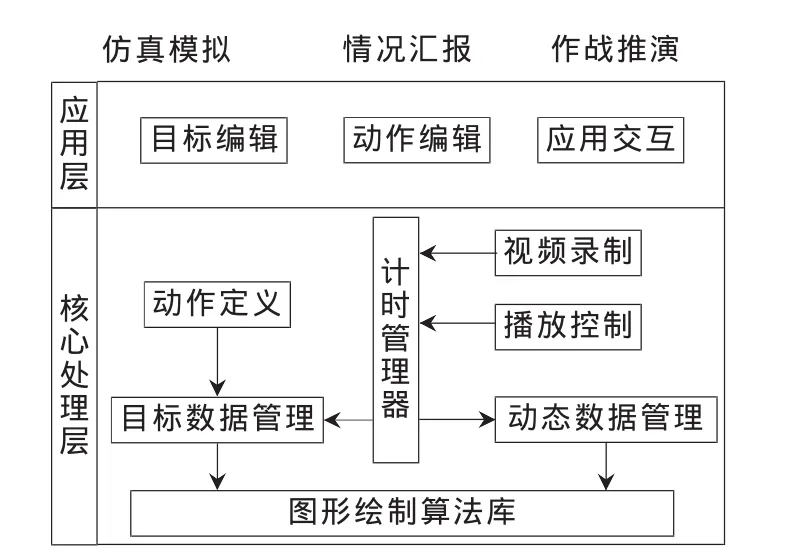
圖1 圖形推演的系統結構
圖形推演系統的外圍是以圖形推演作為支撐平臺的推演類應用。
目標數據管理模塊負責目標靜態數據的管理,處理數據的生成、修改和刪除。目標數據通過調用圖形繪制算法庫提供的相應算法完成顯示繪制。
動作定義模塊為目標對象添加動作,追加到目標數據的動作屬性中。根據實際的需要,還可以設計動作組和動作集合,實現復合動作的定義和播放。
計時管理器是推演技術的重要部分,負責按計時器的單位時間間隔從目標數據管理模塊獲取相關數據,生成當前時刻的動態數據,并記錄在動態數據管理模塊。
動態數據是變化了的靜態數據,其初始顯示姿態和目標靜態數據本身相同,但隨著時刻的變化,目標的顯示效果也會變化。動態數據的顯示也要依靠圖形繪制算法庫完成。依據動作類型的不同,數據變化的方式也不相同。
播放控制主要負責對計時管理器的控制,通過啟動、播放、暫停、停止和定位等指令,控制推演的工作時刻。
視頻錄制提供了與外部應用的標準接口,實現推演制作的數據共享。錄制的過程也要靠計時管理器一幀一幀地推送渲染。
2 爬行動作定義
圖形數據動態表達的基本單位是動作,描述一個動作的基本參數包括動作標識、動作名稱、起始時間和結束時間,而根據動作類型的不同,動作參數也各不相同。圖形推演支持的常用基本動作包括顯示/隱藏、閃爍、旋轉、按軌跡移動、生長和變形等。
在戰場態勢推演過程中,隨著時間的推移,一些實體的空間位置會發生改變(如戰役中部隊的行進,飛機對敵方進行空襲等),這就需要定義一個按軌跡移動的動作,其動作參數為起始時間和移動路線軌跡,前者是線目標移動,后者是點目標移動。點狀目標移動相對簡單,可以通過設置標號的位置和方向角來體現,但對于線狀目標按軌跡的移動,理想效果是使線目標在路線上貼合爬行,因此又稱之為爬行動作定義。
3 爬行效果研究
3.1 問題描述
效果指各類推演動作在播放時呈現出的結果,主要由動態數據管理和圖形繪制算法庫兩個模塊來完成。
對于爬行效果來說,目前大多數研究者[4]采用的方法都是解決線標首尾兩點的軌跡擬合,中間的點通過設置間隔容限和差值來實現。這種算法雖然通用,但沒有考慮線標實際含義和線標本身的擬合算法,導致在展示效果和準確性上都存在局限性,在實際推演播放中會呈現比較突兀的顯示姿態,導致軌跡發生跳躍、偏移。
以帶有寬度的箭標為例,假設其在一條有變化的道路上爬行,如圖 2(a)所示。箭標有 3個定位點,Ps為起始點,Pe為結束點,Pn為中間點,圖2給出了3個時刻的箭頭移動結果,第 1時刻 3點序列為{Ps,Pn,Pe},第 2時刻 3 點 序 列 為{P′s,P′n,P′e},第 3 時 刻 3 點 序 列 為{P″s,P″n,P″e}。
可以看出,如果只采用箭標首尾兩點與軌跡擬合的簡單辦法,則中間點Pn軌跡是否可重合是隨機的。如果軌跡的坡度平緩,則擬合度好一些;如果軌跡變陡峭,則顯示姿態就比較生硬。
另一方面,對于走向變化特別大的路徑,即使每個爬行點都在路徑上,依然不能很好地擬合,如圖2(c)所示。因為以當前的點數,不可能擬合出變化這樣大的箭頭曲線。因此,要做到每一時刻的箭標都較好地與路徑擬合,不僅需要把每個點都修正到路徑線上,點數的密度也必須適合,如圖 2(d)所示。 在圖 2(b)中,不僅 Pn點3個時刻都落在路徑上,并且點數上也有所增加,第2時刻和第3時刻都增加了點數Pn-1。

圖2 問題效果和期望效果對比圖
但是,擬合點的密度也不能簡單地理解為越多越好,只要記錄表示路徑拐點的關鍵點即可,如圖2(d)的情況,只需要6個點。
3.2 改進策略
要達到圖 2(b)和圖 2(d)的期望效果,需從圖形繪制生成和軌跡點生成兩個方面細致研究相關算法。軌跡點生成負責按照計時管理器的時間推進,計算出合適長度和密度的軌跡點陣列;再將生成的軌跡點陣列作為箭標的中軸線點陣列輸入,通過箭標實現算法擬合出對稱美觀的箭標符號。
3.3 算法說明
3.3.1 軌跡爬行算法
采用基于特征點的爬行算法計算出正確的位置點和適合的點數。計算步驟如下。
(1)提取整個軌跡的折線逼近點序列 P{0,1,…,n},這個點序列的密度取上限,足以達到折線擬合曲線的程度。在整個演播過程中,箭標的起點Ps將從軌跡第0點一直移動到第n點。
(2)根據當前時刻ti占總時刻的百分比和箭標的長度計算出ti時刻箭頭起點所在的位置 P′s。顯然 P′s是軌跡點陣列P中的一點,其下標的計算方法為:

其中,t為總的移動時間,Ii為第 i個擬合點在P點組中的下標,Ipi為ti時刻擬合點 Pi在離散點組中的下標。根據各個擬合點在ti時刻的下標,可獲得當前時刻Pi點坐標,P′s=Pi。
(3)依據箭標的概略長度,在P點陣列中,反向計算出 ti時刻時箭尾點的位置 P′e,則 P集合的子集 Pn{P′s…P′e}就是這一時刻的箭標中軸點陣列,Pn∈P。
(4)但是如步驟(1)所述,這個來自軌跡擬合點的 Pn陣列的點非常密集,兩點之間的距離一般不會超過2個像素,用這些點來形成貝塞爾曲線的拐點,對于箭標來說,無論從性能還是效果上講,都有裁剪的必要。
(5)圖形推演數據相當于一種時間序列數據,對軌跡數據的裁剪也可以理解為一種數據的聚類運算。對時間序列數據進行聚類的算法有基于距離、基于特征和基于模型等多種算法[5]。這里采用基于特征值的方法進行裁剪,以鄰近點之間的坡度和距離作為特征值,對Pn的各個點進行篩除。首先設置計算關鍵特征點的距離閾值,默認為所有線段長度數學期望的1/2,然后將Pn陣列中的每一點填寫特征值矩陣結構,記錄每一點和相鄰點的距離和角度關系;取每一點和它的相鄰兩點做三角形,計算該點的尖角和對應邊長度與折線總長度的比例值,小于角度閾值和比例閾值的點即被篩除。
(6)特征點計算完成后,形成 Pj陣列,Pj∈Pn∈P。
(7)將形成的 Pj點陣列送至圖形繪制算法庫,繪制當前時刻的箭標。
(8)這一時刻的推演步驟完成,計時管理器啟動下一時刻的數據推送與繪制,重復上述步驟。
3.3.2 箭標繪制算法
箭標大致分為箭頭和箭身兩部分。箭頭又可分為箭頸、箭耳和箭尖3部分,箭身則由左、右箭身和箭尾組成。一般來說,箭身兩側為貝塞爾曲線,以保證箭身的美觀平滑;箭頭采用直線繪制,以保證箭耳和箭尖的銳利效果。
要實現箭標在路徑上的嚴格爬行,箭標本身的繪制算法也很重要,需保證給定了合適的箭頭中軸線的情況下,箭標的兩側曲線仍有良好的平行度,如圖3所示,P0~P5即為箭標的中軸線。
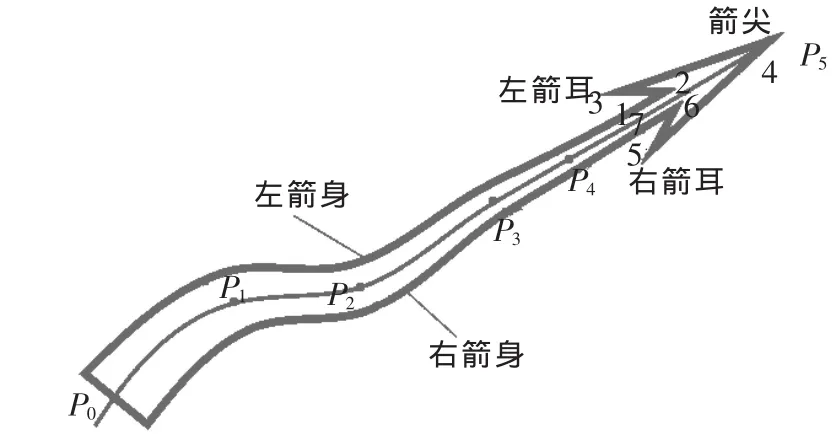
圖3 箭標組成圖
圖3中,箭頭由 7個點組成,其中第 4點位置已經確定,即箭標中軸線的最后一點。根據箭頭角度、箭耳角度和箭頭占箭標總長的比例,就可以計算出其他6個點,這里不再贅述,重點介紹箭身的生成算法。箭身的生成算法如下。
(1)去除中軸線點陣列中的箭尖頂點,計算第 1點到第n-1點的總長度L。
(2)計算箭身貝塞爾曲線的拐點位置到中軸的距離Gdw序列,第i點的拐點寬度計算公式為:

其中,Neckw為箭頸寬度的 1/2,Tailw為箭尾寬度,L為箭標中軸線的總長度,△ln為當前點與前一點的距離,rss為箭頭收縮系數。
計算時采用了指數型的非線性收縮算法,這是式(2)的一個關鍵點。由于最終目的是為了算出表示箭身曲線的拐點位置,如果各個拐點間的位置都是線性關系,擬合出的貝塞爾曲線不但收斂速度慢,且線條走向也會比較僵硬,不夠自然光滑。因此,這里采用指數系數來改變拐點陣列的走向、平滑度和收斂速度。
(3)根據拐點寬度Gdwi生成中軸線點兩側的拐點坐標左點陣列 L{1,…,n-1}和右點陣列 R{1,…,n-1},計算方法如圖4所示。已知 Si-1、Si、Si+1為箭標中軸線上的3點,3點組成一個三角形,計算過Si點與Si-1和Si+1連線平行的線段,線段兩個端點分別為P和Q;再采用定比等分算法,即計算出Li和Ri。公式如下:
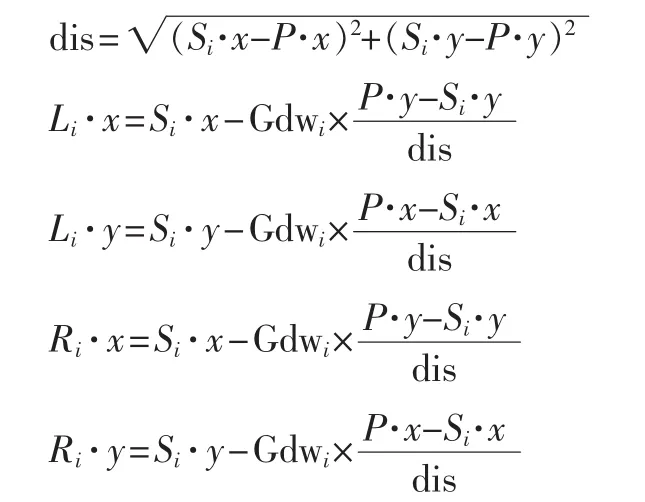
圖4 擬合曲線生成算法圖
(4)獲得了 L和 R點序列,取默認調整比例,就可以擬合出過這些拐點的貝塞爾曲線;按照左箭身—箭頭—右箭身的順序,將集合點序列送入直線繪制函數,即完成了當前時刻箭標的效果顯示。
4 實驗結果
圖5為“燕尾行動箭標”進行爬行移動的效果截圖。經實驗表明,爬行效果在各個彎度上都基本保持了尺寸不變和精確擬合。圖 5(a)為第3 s剛剛開始起步的效果,圖5(b)為第11 s行動箭標在彎路上爬行的效果。
圖5 線目標爬行效果截圖
本文提出的線標爬行算法有效解決了線標移動的軌跡偏移問題,改善了以往按軌跡移動的動畫實現大多只重視點狀目標的實現,線狀目標的移動只關注首尾點或中心點的缺陷。
圖形推演技術被用于多種軍事應用場景中,但不同應用場景(如作戰推演[7]、交接班匯報和想定仿真)在應用流程上還有很多差別,如前兩者的數據大多來自人工生成,而后者則主要是數據自動生成。如何整合這些應用場合的相同點和不同點,保證不同工作方式下動作參數獲取的一致性,是今后研究的一個主要方向。同時,研究多個目標同時動作下的時間同步和提速策略,也是影響效果進一步優化改進的重要因素。
[1]陳康,徐培德,馬滿好,等.態勢推演系統結構研究[J].軍事運籌與系統工程,2005,19(3):43-47.
[2]張寶印.基于矢量的時序圖形圖像處理技術的研究與實踐[D].鄭州:中國人民解放軍信息工程大學,2001.
[3]何忠煥,邊馥苓.GIS系統下二維地圖推演技術的研究[J].武漢大學學報(信息科學版),2005,30(1):69-72.
[4]張欣,張立立,曹國峰,等.戰場態勢推演 GIS動態表達技術與應用[J].地球信息科學,2006,8(4):80-83.
[5]趙恩來,郝文寧,趙水寧,等.改進的基于密度方法的態勢聚類顯示算法[J].計算機工程,2010,36(18):35-37.
[6]楊瑞平,張小京,趙東波.推演系統中面向角色的二維態勢研究 [J].系統工程與電子 技術,2007,29(12):2093-2096.
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
中華詩詞(2018年11期)2018-03-26 06:41:34
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
Coco薇(2016年8期)2016-10-09 02:11:50
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37