基于單片機的智能航天模型發射系統
2013-02-23 09:14:15上海市第八中學李懿德
發明與創新 2013年35期
文 上海市第八中學 李懿德
基于單片機的智能航天模型發射系統
文 上海市第八中學 李懿德
作為上海黃浦區青少年科技活動中心航天模型組與機器人組的成員,我經常參加航天模型競賽,發現許多初學者在賽場上會因為心理緊張出現手忙腳亂的現象。
在賽場上,一個細微的疏忽便會影響最終成績。如果有一套自動化的系統使整套發射動作方便、快捷,將會給初學者帶來許多益處。因此,有必要研制一套智能航天模型的發射系統。
通過查閱航天模型的相關文獻和資料,我發現目前航天模型發射的一般方法都是人工組裝發射架,然后用點火控制器手動點燃模型火箭發動機使火箭升空。點火時的風速極大地影響了模型火箭的飛行高度,進而影響滯空時間,如此重要的一點卻常常被選手遺忘。
另一種方法是將玩具車改裝成主要用于發射表演的航天模型發射車。目前還沒有一套用于競賽、能自動行駛至安全半徑、選擇發射窗口再實現發射架自動起豎、點火的發射系統。
因此,基于單片機技術來實現這一系統,具有實用價值。
一、設計目標
針對本研究的目的與意義,設計目標如下:
1.該系統能按預定軌跡到達安全半徑內的指定位置。
2.發射場實時風速確定發射窗口。
3.起豎迅速、穩定,點火及時。
4.各部件堅固耐用。
5.控制電路能穩定工作。
二、研究方法
根據設計目標,確定系統設計方案,基本思路是將AVR單片機的控制器用于控制整個發射系統,板材制作發射系統本體,設計合適的發射架,并將市售的風速傳感器加以改進來測風速。
本項目涉及機械工程、電子技術和自動控制技術,研究內容包括硬件和軟件兩部分。由于該發射系統需要自動點火,為防止單片機短暫失電導致電子電路工作紊亂而失控,點火電路需單獨設置。
主要設計工作包括硬件結構總體設計、風速傳感器的選擇及控制流程設計。
1.硬件實現
(1)發射架的選型
模型火箭發射架主要有導桿式和導軌式兩種,若使用導桿式發射架則需在模型火箭外增加1至2個導向管,發射時,導向管套入發射架,可實現定向引導。
模型火箭高速飛行時,有導向管會增加不少阻力,而使用導軌式發射架則可以摒棄導向管,所以我決定選擇導軌式發射架。
(2)發射架起豎機構的實現
在初樣研制階段,我采用直流電機加裝齒輪組使之帶動絲杠轉動,從而實現頂桿運動,完成了發射架的升降。
(3)風速傳感器的實現
通過比較市場上出售的風速傳感器的適用范圍和價格,最后選定較便宜的小型風杯式風速傳感器。
它采用光電門測速的方式,能有效測量實時風速。為適應該項目使用的單片機,我更換了光電門,增加了兩個電阻,并通過編程的方式使輸出的信號轉變成數據。
(4)尋跡行駛功能的實現
采用一般搜救機器人上常見的灰度傳感器,使之能根據灰度沿地面的黑線行駛,并在標記處停下。
(5)自動點火的實現
利用發射架固定環上的長螺絲,把模型火箭發動機點火頭的兩條引線接在長螺絲上,在發射架起豎至與地面垂直后長螺絲與銅片接觸,干電池的正負極各接一塊銅片,這樣便形成了閉合回路,模型火箭發動機隨之點火,火箭升空。
2.實物樣機及測試
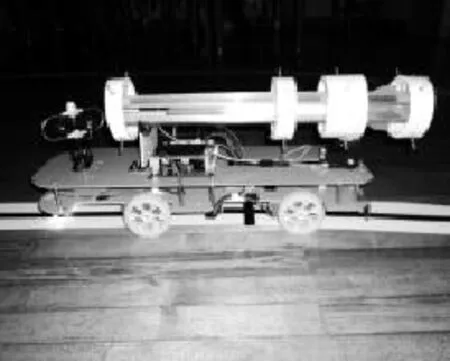
(1)樣機(初樣)模型如下圖所示:

(2)整機測試及總結
測試結果表明,樣機基本達到預期效果,各分系統均正常工作。但在實驗過程中也發現了以下不足:
1.兩車輪間距太大,轉向時極為不便。優化方案:縮小兩輪間距。
2.發射架起豎時噪聲大,長時間使用齒輪會打滑,絲杠帶動螺母時頂桿和發射架甚至整個車身都產生共振,導致模型火箭發動機點火頭脫落。優化方案:拆除絲杠,縮短機器人本體兩板間銅柱長度,改用大扭力伺服電機(舵機)及云臺組成單自由度云臺完成發射架起豎。
改進后正樣如下圖:
起豎機構還可用步進電機和轉動機構,該起豎機構由步進電機驅動而帶動發射架轉動,轉動機構可采用現有技術中的任何一種轉動機構,只要能實現發射架的起豎即可。
控制器記錄用于驅動步進電機轉動的脈沖個數,根據脈沖個數、預設角度和步進電機的步距角之間的關系,產生所述觸發信號,控制器由該觸發信號控制而比較風速傳感器感測的風速信號和發射窗口。
三、總結與展望
長久以來,我一直在航天模型的賽場上觀察各個年齡段參賽選手的臨場發揮。在國家級賽事的賽場上,要求選手在一小時內現場制作出兩枚模型火箭并現場發射,普通競賽級發射裝置雖能達到效果,但組裝調試的過程非常麻煩,也容易出現失誤,對于剛做完作品的選手來說,無疑是雪上加霜,時間上的限制也極易造成心理緊張。
本課題的出發點就是運用現代化的智能技術,實現航天模型發射的自動化和簡易化。
該智能發射系統不僅實現了航天模型發射的自動化,還能判讀發射場的實時風速,選擇合適的發射時機。今后,我還將完善該系統,讓其實現在有風條件下的自動發射。
通過檢索,我發現遼寧省一所學校有通過手動遙控方式調整發射架與地面的角度來達到目的的方案,而通過自控方式實現此功能的方法還沒有。我今后的改進設想是,在機器人上裝一個風向傳感器,把發射架起豎裝置的單自由度云臺改為雙舵機二自由度云臺,即可實現發射架的俯仰及左右水平旋轉,再通過編程控制,根據風向和風速確定發射架的偏轉角度和方向。
另外還可以結合河北科技大學最新研發的模型火箭發射同步計時裝置(通過專利檢索得知),利用雙路開關的兩對觸點分別控制模型火箭和計時裝置的啟動(現在主要的航天模型比賽都以滯空時間作為比賽成績),不僅簡化了操作過程,而且實現了模型火箭點火和計時的同步,徹底消除了人為因素對計時精度的影響,使比賽更加公平、公正且實現了航天模型競賽的實質自動化。
通過此項目的研究,我意識到理論設想與實際落實之間的差距——絲杠設計源于理論上的“可行”,而當產品做出后卻出現了種種意想不到的狀況,因此產生了“歸零”的處理。
在這個項目的實現過程中,我學到了許多制作方法。比如接插件與導線的連接、金屬端子壓線的方法等。這個項目的編程對我來說也是一種挑戰,在這期間,我自學了控制程序的方法,并通過大量訓練、實驗,最終熟練掌握了一套程序,將其應用到本項目中。
所以,只有當創新的思維火花、扎實的專業基礎和不懈的努力付出共存,才可能實現自己的夢想!
(指導老師:趙金才)
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
光學精密工程(2016年6期)2016-11-07 09:07:19
西南交通大學學報(2016年4期)2016-06-15 20:29:37
