三維激光掃描儀點位精度檢測研究
2013-03-06 10:12:21王鳴霄戴相喜王正強
城市勘測 2013年6期
王鳴霄,戴相喜,王正強
(南京市測繪勘察研究院有限公司,江蘇南京 210019)
三維激光掃描儀點位精度檢測研究
王鳴霄?,戴相喜,王正強
(南京市測繪勘察研究院有限公司,江蘇南京 210019)
三維激光掃描儀掃描作為一種新型的地物三維坐標快速獲取手段,具有傳統測量手段很多無法比擬的優勢,具有廣闊的應用前景。為了解其掃描所得點的實際精度,以便確定其適用領域,本文設計實驗,采用三維激光掃描儀和全站儀重復測量的方法對其進行檢測,得到三維激光掃描儀精度的基本情況,為確定其適用范圍提供數據支持。
三維激光掃描儀;LiDAR;全站儀
1 引 言
地面三維激光掃描技術是整個三維數據獲取和重構技術體系中最新的技術,真正做到了直接從實物進行快速的逆向三維數據采集及模型重構。無需作任何實物表面處理,就可以獲得景深長、避免光學變形因素帶來誤差的實體表面位置數據,激光點云中的每個點的三維坐標數據都是直接采集的目標真實位置數據,進而使得供后處理的數據真實可靠。三維激光掃描技術正因為其獲取速度快、精度高、實時性強、全數字化等特點,并且能夠制作形式多樣的數字產品等突出優勢[1]。激光掃描測量儀器的精度也影響三維點云模型的建立和應用,因此地面三維激光掃描儀的檢校與精度評估對于三維激光掃描儀的有效應用是十分必要的[3]。本文采用全站儀對同一測量區域分別使用地面激光掃描儀和全站儀進行重復測量,并選取幾何特征點進行精度對比,初步得到三維激光掃描的掃描精度,為三維激光掃描儀進一步使用提供精度方面參考。
2 三維激光掃描儀工作原理
地面三維激光掃描系統由三維激光掃描儀、數碼相機(可選)、掃描儀旋轉平臺、軟件控制平臺,數據處理平臺及電源和其他附件設備共同構成。
目前市面上主流的三維激光掃描儀有脈沖式和相位式。其主要工作原理如1所示,首先由激光脈沖二極管發射出激光脈沖信號,經過旋轉(震蕩)棱鏡,射向被測物體,然后通過探測器,接收并記錄反射回來的激光脈沖[5],最后轉換成能夠直接識別處理的數據信息。
三維激光掃描儀的原始觀測數據一般包括激光光束的水平角、垂直角、距離值、反射強度,如配備有數碼相機,通過后期處理可匹配色彩信息。通過數據處理后的數據由大量離散的點組成,稱為點云,包含信息有:點位坐標、反射強度和顏色信息(或灰度信息)。通過對點云數據編輯構建三維模型,以實現數據展示和應用。在數據采集和處理過程中主要的誤差源有:點位誤差(系統誤差和偶然誤差)和建模誤差。本文通過對點云精度和模型精度的分析,分析總結通過三維激光掃描儀所獲得的成果的精度情況。
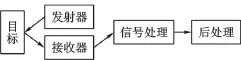
圖1 地面三維激光掃描系統工作原理
實驗采用Riegl420i三維激光掃描儀進行測試,性能如表1所示。

Riegl 420i激光掃描儀性能指標 表1
3 實驗過程
本文三維激光掃描精度檢測實驗選擇在工業廠區,對架空工業管道進行掃描、建模,然后進行精度對比。
3.1 點云精度檢測
首先,在圖2場景下利用支架布設10組平面標靶,每組為縱向5個標靶,具體要求如下:
(1)在布設標靶時利用全站儀控制每組標靶在同一垂線上,且在支架上均勻分布;
(2)標靶距離掃描儀距離應大于掃描儀最小觀測距離,且小于標靶可判讀距離;
(3)對于距離較遠的標靶應布設在支架特征點處,以提高后續判讀的可靠性。

圖2 現場照片
而后,利用現場RTK控制點將50個標靶的中心點位測量到92南京地方坐標系和吳淞高程系下;同時利用3個點做坐標轉換,將點云數據中的標靶中心坐標轉換到92南京地方坐標系和吳淞高程系。
最后,將全站儀數據與點云數據進行坐標比對,結果見表2所示。
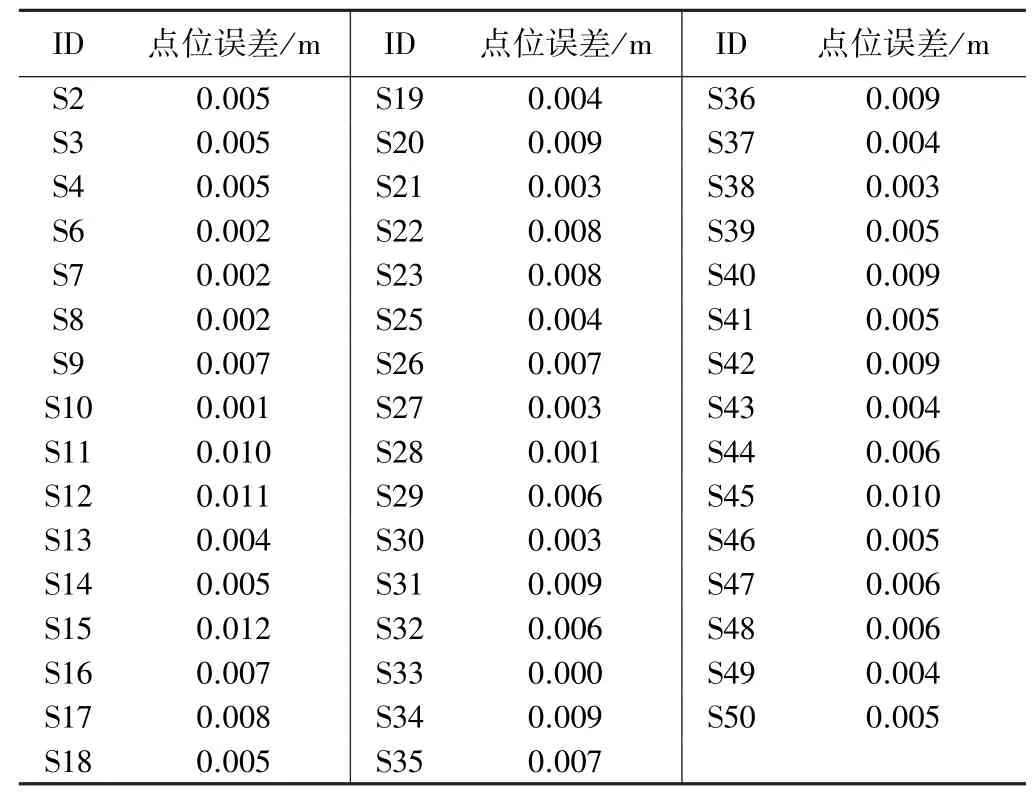
點位比較表 表2
點位差值中誤差為:m0=±0.004 m
點位差值最大差值為:m大=0.012 m
Riegl 420i三維激光掃描儀的標稱精度為±4 mm。本次實驗標靶與掃描儀最大距離為30 m,結合標靶坐標比對成果和標靶至掃描儀的距離綜合分析,扣除部分點判讀影響,距離近的標靶掃描精度略高。建議對于高精度掃描不宜大于30 m。
3.2 模型精度檢測
在項目模型的基礎上利用免棱鏡全站儀現場測量實體表面坐標,在內業將全站儀獲取的坐標與建立的模型進行空間相對關系比對。主要比對的是點到模型的最近距離。在實驗過程中分別選擇平面(選擇較平整建筑墻體)和圓管(選擇工業架空管線)進行模型精度檢測。
平面模型比對結果如表3所示。點位差值中誤差為:m0=±0.024 m點位差值最大差值為:m大=0.058 m圓管模型比對結果如表4所示。
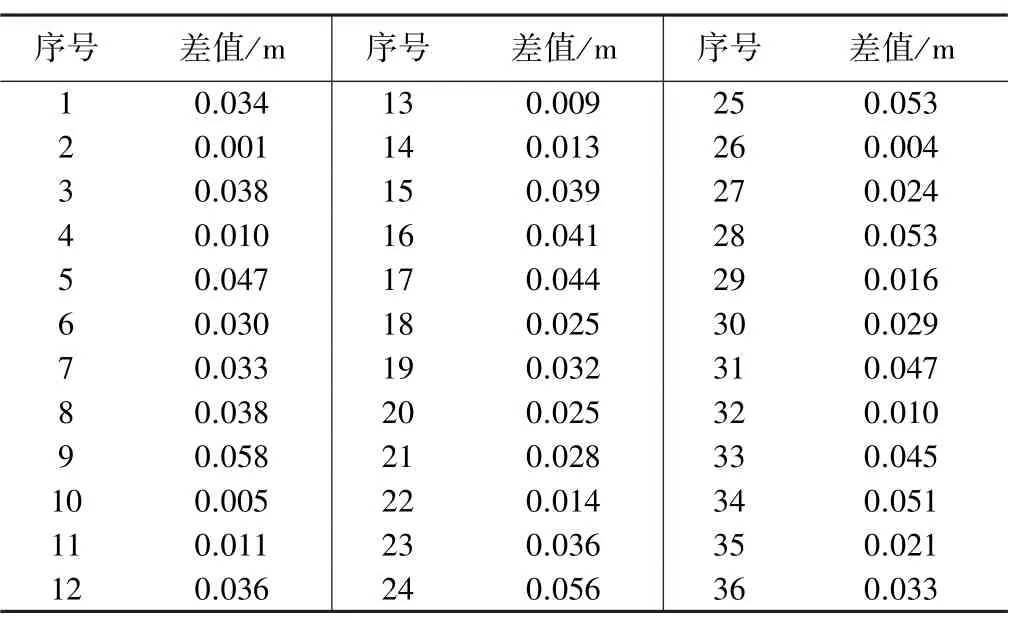
模型精度檢查表 表3
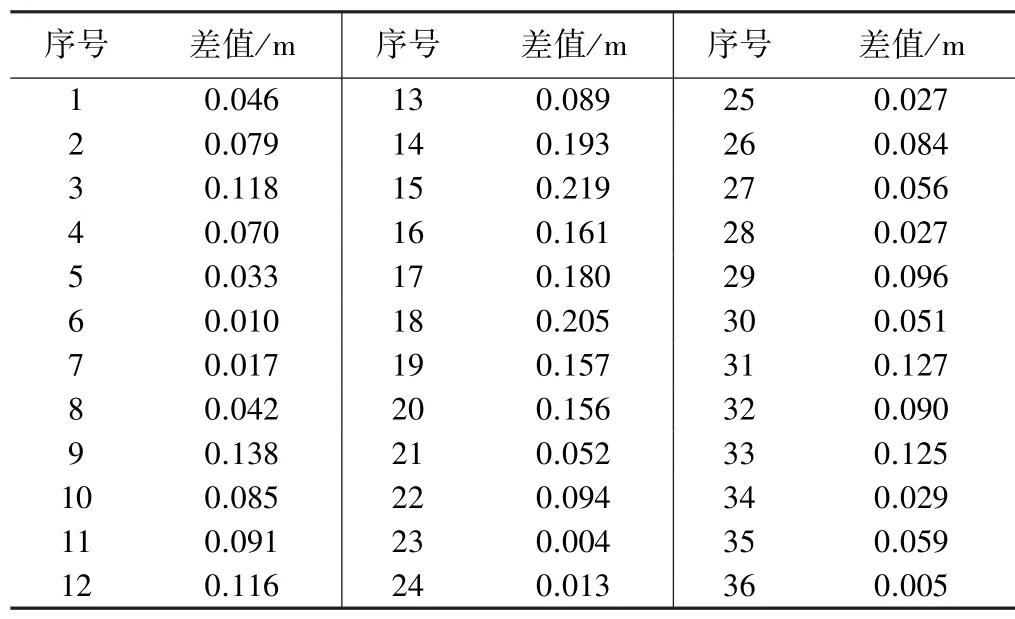
模型精度檢查表 表4
點位差值中誤差為:m0=±0.075 m
點位差值最大差值為:m大=0.219 m
綜合考慮現場圓管變形等和墻體表面的凸凹等情況綜合分析,模型精度可達到1∶500數字地圖要求。
4 結 論
通過數據檢測的信息表明,地面三維激光掃描系統獲取的點云數據可以非常精確地測量出實體的尺寸大小。獲取點云數據的單點位置精度和表現效果都明顯優于傳統的數字測圖,完全可以滿足大比例尺測圖的要求。就野外測量而言,測量人員無需現場布設控制點、立尺或立棱鏡等工作,就可獲取足夠的數據,這在很大程度上減輕了外業的勞動強度和作業時間。在內業處理上,內業人員可以借助于處理軟件的功能,有針對性地選擇處理目標,快速實現各種掃描結果的數字化,且掃描的結果具有重復應用的特性。
但是,本文所進行的試驗均是在小范圍內進行,未對影響激光點精度的多種干擾源進行獨立分析;而且通過三維激光掃描所獲取的數據較為豐富,同時導致數據量大,在數據處理時除了結合專業軟件外對計算機配置和人員要求較高,在推廣應用中還有待進一步研究。
[1] 劉浩,張冬陽,馮健.地面三維激光掃描儀數據的誤差分析[J].水利與建筑工程學報,2012,10(4):38~41.
[2] 梅文勝,周燕芳,周俊.基于地面三維激光掃描的精細地形測繪[J].測繪通報,2010(1):53~56.
[3] 劉春,張蘊靈,吳杭彬.地面三維激光掃描儀的檢校與精度評估[A].《測繪通報》測繪科學前沿技術論壇摘要集[C];2008,1~9.
[4] 張國輝.基于三維激光掃描儀的地形變化監測[J].儀器儀表學報,2006,27(6):96~97.
[5] 臧克.基于Riegl三維激光掃描儀掃描數據的初步研究[J].首都師范大學學報·自然科學版,2007,28(1):77~82.
[6] 張宏,胡明.三維激光掃描儀在地形測量中的應用[J].企業技術開發,2007,26(8):16~19.
Study on Detection of 3D Laser Scanner Positional Accuracy
Wang Mingxiao,Dai Xiangxi,Wang Zhengqiang
(Nanjing Institute of Surveying,Mapping&Geotechnical Investigation,Co.Ltd,Nanjing 210019,China)
3D laser scanner is a new fastmean to acquire 3d coordinates of ground objects,hasmany increasing incomparable advantages than traditionalmeasuringmeans and haswide application prospect.Aim to obtain the actual accuracy of its scanning data,so as to confirm its range of application;this paper designed an experiment,detection accuracy through surveying the same area using both 3d laser scanner and total station instrument,finally get the general accuracy information of 3d laser scanner,offer data support to confirm its application range.
3d laser scanner;LiDAR;total station instrument
1672-8262(2013)06-79-03
P237
B
2013—05—29
王鳴霄(1976—),男,高級工程師,主要從事大地測量、精密工程測量等方面工作。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
光學精密工程(2016年6期)2016-11-07 09:07:19
電測與儀表(2016年9期)2016-04-12 00:29:52