LiDAR 點(diǎn)的精度檢驗(yàn)
2013-03-06 02:12:09歐陽平
城市勘測 2013年4期
歐陽平
(1.漳州市測繪設(shè)計(jì)研究院,福建漳州 363000; 2.福建省漳州市城鄉(xiāng)規(guī)劃局,福建漳州 363000)
LiDAR 點(diǎn)的精度檢驗(yàn)
歐陽平1,2?
(1.漳州市測繪設(shè)計(jì)研究院,福建漳州 363000; 2.福建省漳州市城鄉(xiāng)規(guī)劃局,福建漳州 363000)
LiDAR機(jī)載激光掃描測高或激光雷達(dá)(LiDAR)是一種安裝在飛機(jī)上的機(jī)載激光探測和測距系統(tǒng),可以量測地面物體的三維坐標(biāo),在三維地理空間信息的數(shù)據(jù)采集方面有廣闊的發(fā)展前景和應(yīng)用需求。本文介紹了LiDAR測量技術(shù)的優(yōu)越性及其應(yīng)用,提出了LiDAR點(diǎn)精度的檢驗(yàn)方法,并運(yùn)用實(shí)例對(duì)加拿大OPTECH公司的ALTM3100系統(tǒng)的Li-DAR點(diǎn)的高程、平面精度進(jìn)行內(nèi)符合、外符合檢驗(yàn),并提出了提高LiDAR點(diǎn)精度的方法。
激光雷達(dá);4D產(chǎn)品;精度檢驗(yàn)
1 前 言
LiDAR即Light Detection And Ranging,也叫機(jī)載激光掃描測高或激光雷達(dá),是一種安裝在飛機(jī)上的機(jī)載激光探測和測距系統(tǒng),可以量測地面物體的三維坐標(biāo)。Li-DAR數(shù)據(jù)經(jīng)過相關(guān)軟件數(shù)據(jù)處理后,可以生成高精度的數(shù)字高程模型(DEM)、等高線圖及正射影像圖(DOM)。機(jī)載激光雷達(dá)技術(shù)的商業(yè)化應(yīng)用,使航測制圖如生成DEM、等高線和地物要素的自動(dòng)提取更加便捷,其地面數(shù)據(jù)通過軟件處理很容易合并到各種數(shù)字圖中。
LiDAR技術(shù)發(fā)展歷史雖然不長,但是引起了人們的廣泛關(guān)注和應(yīng)用,成為國際研究開發(fā)的熱點(diǎn)技術(shù)之一。同其他遙感技術(shù)相比,LiDAR技術(shù)具有自身的優(yōu)越性,主要表現(xiàn)在以下幾個(gè)方面[1]:
(1)LiDAR系統(tǒng)是一種主動(dòng)式測量系統(tǒng),不受天氣、云霧的影響。
(2)激光脈沖信號(hào)能部分穿透植被,能快速、高精度和高空間分辨率地繪制林區(qū)或山區(qū)的真實(shí)地形圖,只要植被不會(huì)太密足以保證激光信號(hào)能夠到達(dá)地面并被反射回去。
(3)無需大量地面控制點(diǎn),且速度快,半天就能完成1 000 km2區(qū)域面積大小的地形數(shù)據(jù)采集[2]。
(4)作業(yè)安全,它能進(jìn)行危險(xiǎn)地區(qū)(如沼澤地帶、大型垃圾場)和無法布設(shè)控制點(diǎn)的地區(qū)的測圖工作。
(5)作業(yè)周期短,易于更新。
(6)實(shí)效性強(qiáng),24 h內(nèi)就可以提取測區(qū)的DEM數(shù)據(jù)。
(7)將信息獲取、處理及應(yīng)用技術(shù)納入同一系統(tǒng)中,更有利于提高自動(dòng)化和高速化程度。
2 LiDAR主要應(yīng)用領(lǐng)域
LiDAR系統(tǒng)可以為城市、地理、資源、生態(tài)、環(huán)境、人口、經(jīng)濟(jì)、社會(huì)等領(lǐng)域提供服務(wù),特別是國土資源、城市規(guī)劃、環(huán)境保護(hù)、公共安全等部門,充分利用由LiDAR系統(tǒng)參與建立的城市數(shù)字信息系統(tǒng)實(shí)現(xiàn)辦公自動(dòng)化和決策科學(xué)化。目前主要包括以下幾個(gè)方面的應(yīng)用[3]。
(1)測制帶狀目標(biāo)地形圖;
(2)環(huán)境監(jiān)測、災(zāi)害調(diào)查;
(3)海岸地區(qū)測繪;
(4)森林地區(qū)DEM的獲取、推求森林垂直結(jié)構(gòu);
(5)城市三維建模。
LiDAR利用激光傳感器對(duì)地面進(jìn)行掃描,同時(shí)利用IMU(慣性導(dǎo)航系統(tǒng))實(shí)時(shí)定位飛機(jī)姿態(tài)(250 Hz),再加上GPS(全球定位系統(tǒng))觀測坐標(biāo)(采樣間隔為1 s),還可以打開LiDAR攜帶的數(shù)碼相機(jī)進(jìn)行航空攝影獲取相片數(shù)據(jù),可用于快速獲取大面積三維地形數(shù)據(jù),快速生成城市地區(qū)的數(shù)字表面模型(DSM),進(jìn)行地物自動(dòng)提取,由DTM生成數(shù)字高程模型(DEM),結(jié)合數(shù)碼影像生成數(shù)字正攝影像(DOM),也可構(gòu)建立體模型繪制數(shù)字線劃圖(DLG),在數(shù)字城市中獲取大范圍高精度的4D產(chǎn)品(如圖1~圖4所示),為城市三維建模提供基礎(chǔ)數(shù)據(jù)。

圖1 DSM
圖2 DEM

圖3 南通狼山地區(qū)DEM(部分)
圖4 南通狼山地區(qū)DOM(部分)
3 LiDAR點(diǎn)精度及檢驗(yàn)
3.1 標(biāo)稱精度
由于不同的生產(chǎn)廠家對(duì)各自的系統(tǒng)所標(biāo)稱的精度千差萬別[3],例如,徠卡公司的ALS50標(biāo)稱精度為:平面<1 m,高程6 cm~10 cm(航高4 000 m);加拿大OPTECH公司的ALTM3100的標(biāo)稱精度為:平面1/3000×航高,高程<0.35 m(航高3 000 m)[3]。
實(shí)際生產(chǎn)中要對(duì)某一具體型號(hào)的LiDAR系統(tǒng),選取某些特殊地形的場地進(jìn)行精度驗(yàn)證。
3.2 高程精度檢驗(yàn)方法
目前經(jīng)常使用的高程檢校辦法是找一小塊水平的平地作為檢校場,這個(gè)面上的高程應(yīng)該相等。然后利用激光雷達(dá)對(duì)檢校場進(jìn)行實(shí)地飛行,取地面的實(shí)際高程作為真實(shí)高度,然后用每個(gè)激光點(diǎn)的實(shí)際觀測值與真實(shí)值求差值,就可以獲得每個(gè)激光點(diǎn)的觀測值誤差和中誤差。
3.3 平面精度檢驗(yàn)方法
由于機(jī)載激光的觀測不能完全按照要求在地物特征點(diǎn)上采樣,也就是說,給定一個(gè)激光腳點(diǎn)很難同真實(shí)場景中的地物點(diǎn)匹配起來。為此通常是選取規(guī)則房屋的房角或屋脊,輸電線等點(diǎn)狀或線狀地物來進(jìn)行。為了盡量在掃描過程中能采集到這些點(diǎn)狀或線狀地物的特征點(diǎn),在作業(yè)過程中要保證足夠的數(shù)據(jù)密度。然后將激光點(diǎn)和影像定位,判讀落在特征點(diǎn)上的腳點(diǎn),在實(shí)地量測其精度,即可統(tǒng)計(jì)出激光LiDAR點(diǎn)的平面精度[3]。
3.4 工程實(shí)例
數(shù)據(jù)采集時(shí)間:2006年7月;儀器:ALTM-3100;航攝高度:3 500 m;
LiDAR設(shè)計(jì)參數(shù):脈沖頻率:70 kHz,掃描頻率: 32 Hz,掃描角度:20°,旁向重疊:40%,地面點(diǎn)間距: 0.8 m,激光類型:窄激光。
(1)高程內(nèi)符合精度檢驗(yàn)
取激光點(diǎn)地面的平均高程作為真值,然后用每個(gè)激光點(diǎn)的實(shí)際觀測值與真值求差值,獲得每個(gè)激光點(diǎn)的觀測值誤差和中誤差。
根據(jù)實(shí)際情況選取A1、A2兩個(gè)區(qū)域進(jìn)行激光點(diǎn)的高程內(nèi)符合精度檢驗(yàn),檢查區(qū)域影像如圖5所示,對(duì)應(yīng)激光腳點(diǎn)分布圖如圖6所示。
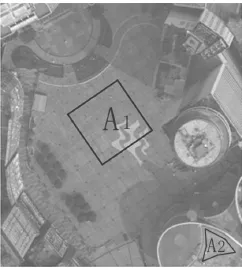
圖5 A1、A2影像圖

圖6 A1、A2激光腳點(diǎn)分布圖
①單航線,無重疊區(qū)域,圖5、圖6所示A1區(qū)域
A1區(qū)域:面積約1 967.5 m2,激光點(diǎn)3 200個(gè)點(diǎn),點(diǎn)間距0.68 m。

A1區(qū)域高程內(nèi)符合精度統(tǒng)計(jì)表 表1
②兩條航線重疊區(qū)域,圖5、圖6所示A2區(qū)域
A2區(qū)域(東北、西南兩條LiDAR航線重疊區(qū)域):面積約249 m2,激光點(diǎn)1 352個(gè)點(diǎn),單航線點(diǎn)間距0.68 m。

A2區(qū)域高程內(nèi)符合精度統(tǒng)計(jì)表 表2
從表1、表2的統(tǒng)計(jì)結(jié)果來看,激光點(diǎn)的高程內(nèi)符合與儀器標(biāo)稱精度(高程<0.35 m航高3 000 m)基本一致。
(2)外符合精度檢驗(yàn)
從內(nèi)符合精度檢驗(yàn)來看,在平坦地區(qū)LiDAR點(diǎn)的高程精度是符合其標(biāo)稱精度的,鑒于通過內(nèi)符合精度檢驗(yàn)無法確定不平坦區(qū)域的高程精度,故采用實(shí)地檢查的方法來檢查LiDAR點(diǎn)在不平坦地區(qū)的高程精度,同樣可用實(shí)地檢查的方法來檢查LiDAR點(diǎn)的平面精度。
本例中利用Trimble RTK系統(tǒng)對(duì)與(1)中同航帶的LiDAR點(diǎn)進(jìn)行野外外符合精度檢驗(yàn)。
RTK使用儀器為Trimble 5700標(biāo)稱平面精度為(±5+1ppm×D)mm,觀測采用1+2的觀測模式(一臺(tái)基準(zhǔn)站,兩臺(tái)流動(dòng)站),為保證RTK的準(zhǔn)確度和控制點(diǎn)的可靠性,在架設(shè)好基準(zhǔn)站后,利用RTK對(duì)已知控制點(diǎn)進(jìn)行檢核,并用兩臺(tái)流動(dòng)站分別在同一位置測量,以進(jìn)行互相比較檢核,結(jié)果表明RTK成果與靜態(tài)成果相差不大(平面9.5 mm,高程7 mm);兩臺(tái)RTK流動(dòng)站測同一點(diǎn)的坐標(biāo)成果基本一致,由此可見,基準(zhǔn)站數(shù)據(jù)成果可靠,RTK流動(dòng)站工作正常,可信度高。
①高程外符合精度檢驗(yàn):采取在道路中線、比較寬闊的地方測得部分高程點(diǎn)。通過搜索每個(gè)實(shí)測點(diǎn)周圍5 m范圍內(nèi)的LiDAR點(diǎn),再由這些LiDAR點(diǎn)坐標(biāo)通過線性內(nèi)插的方式計(jì)算出測點(diǎn)處的LiDAR點(diǎn)高程,并與實(shí)測的高程進(jìn)行比較。共選擇了49個(gè)檢核樣本,Li-DAR點(diǎn)高程誤差分布區(qū)間見表3,高程誤差分布直方圖如圖7所示。
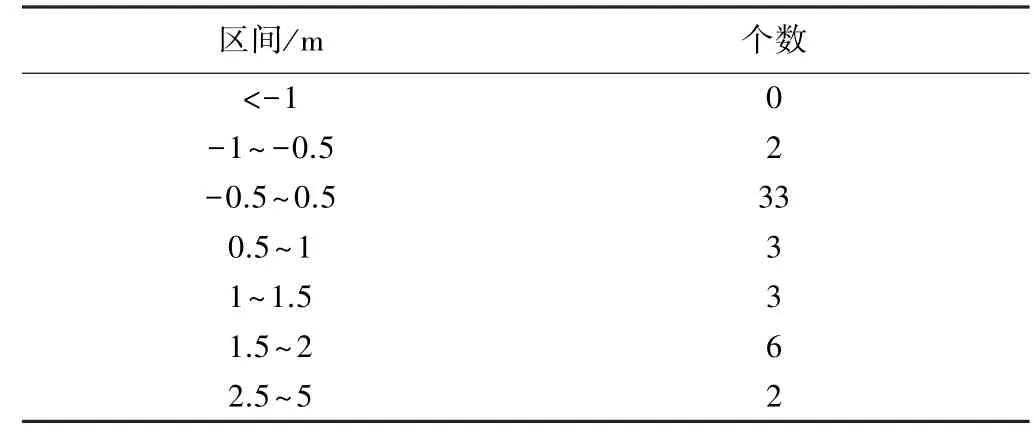
LiDAR點(diǎn)高程誤差分布區(qū)間表 表3
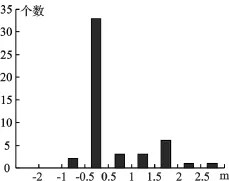
圖7 高程誤差分布直方圖
從誤差的分布范圍來看,LiDAR點(diǎn)高程誤差分布在-1 m~3 m的范圍內(nèi):其中33個(gè)分布在-0.5m~-0.5m范圍內(nèi),占檢測樣本的67%;6個(gè)分布在0.5m~1.5m范圍內(nèi),占檢測樣本的12%;6個(gè)分布在1.5m~2m范圍內(nèi),占檢測樣本的12%;兩個(gè)大于2 m,占檢測樣本的4%;2個(gè)小于-0.5 m,占檢測樣本的4%。
從檢核點(diǎn)的分布區(qū)域看,誤差較大的檢核點(diǎn)(大于1 m)共11個(gè),其中有7個(gè)分布在山脊(谷)上。且“-”誤差有只有7個(gè),而“+”有誤差42個(gè)。
在選取的49個(gè)LiDAR點(diǎn)高程樣本中:有12個(gè)分布在比較寬闊平坦的地方,檢核點(diǎn)差值絕對(duì)值平均為0.286 m,只有一個(gè)點(diǎn)的差值絕對(duì)值>1 m,若去除該檢核點(diǎn),則剩余檢核點(diǎn)的差值絕對(duì)值平均為0.205 m;22個(gè)分布在路面上及其他較平坦的地區(qū),檢核點(diǎn)差值絕對(duì)值的平均為0.526 m,有三個(gè)檢核點(diǎn)的差值絕對(duì)值>1 m,若去除這三個(gè)點(diǎn)則剩余19個(gè)檢核點(diǎn)的差值絕對(duì)值的平均為0.291 m;15個(gè)分布在地形變化較大的區(qū)域,檢核點(diǎn)差值絕對(duì)值的平均為1.087 m,其中7個(gè)檢核點(diǎn)的差值絕對(duì)值>1 m,5個(gè)檢核點(diǎn)的差值絕對(duì)值>1.5 m。
可以看出:LiDAR點(diǎn)的誤差大部分分布在-0.5m~0.5m的范圍內(nèi),LiDAR點(diǎn)的高程在平坦地區(qū)精度能達(dá)到0.205 m,在較平坦的地區(qū)的精度能達(dá)到0.291 m,但在地形變化較大的地方的精度只有1.087 m,且存在一定的系統(tǒng)誤差。檢核點(diǎn)絕對(duì)值的平均誤差為0.639 m;若去除誤差≥1 m的檢核點(diǎn)(11個(gè)),用剩余的38個(gè)樣本計(jì)算檢核點(diǎn)誤差絕對(duì)值的平均為0.305 m,與儀器標(biāo)稱精度(3 500 m飛行高度,≤35 cm)相符。
②LiDAR點(diǎn)的平面外符合精度檢核
3.3 節(jié)所述的LiDAR點(diǎn)的平面精度檢驗(yàn)方法在實(shí)際中很難操作,本文通過LiDAR點(diǎn)高程與實(shí)測高程的聯(lián)系來檢查LiDAR點(diǎn)的平面外符合精度。
通過搜索實(shí)測點(diǎn)周圍5 m范圍內(nèi)的LiDAR點(diǎn),再由這些LiDAR點(diǎn)坐標(biāo)通過線性內(nèi)插的方式計(jì)算出測點(diǎn)處的LiDAR點(diǎn)高程,再比較內(nèi)插的高程和LiDAR點(diǎn)的高程,將差值最小的LiDAR點(diǎn)的平面坐標(biāo)作為實(shí)測點(diǎn)處的LiDAR點(diǎn)平面坐標(biāo),再與實(shí)測坐標(biāo)進(jìn)行對(duì)比,并分析X方向和Y方向上誤差分布,結(jié)果見表4,共選取了58個(gè)檢測樣本。
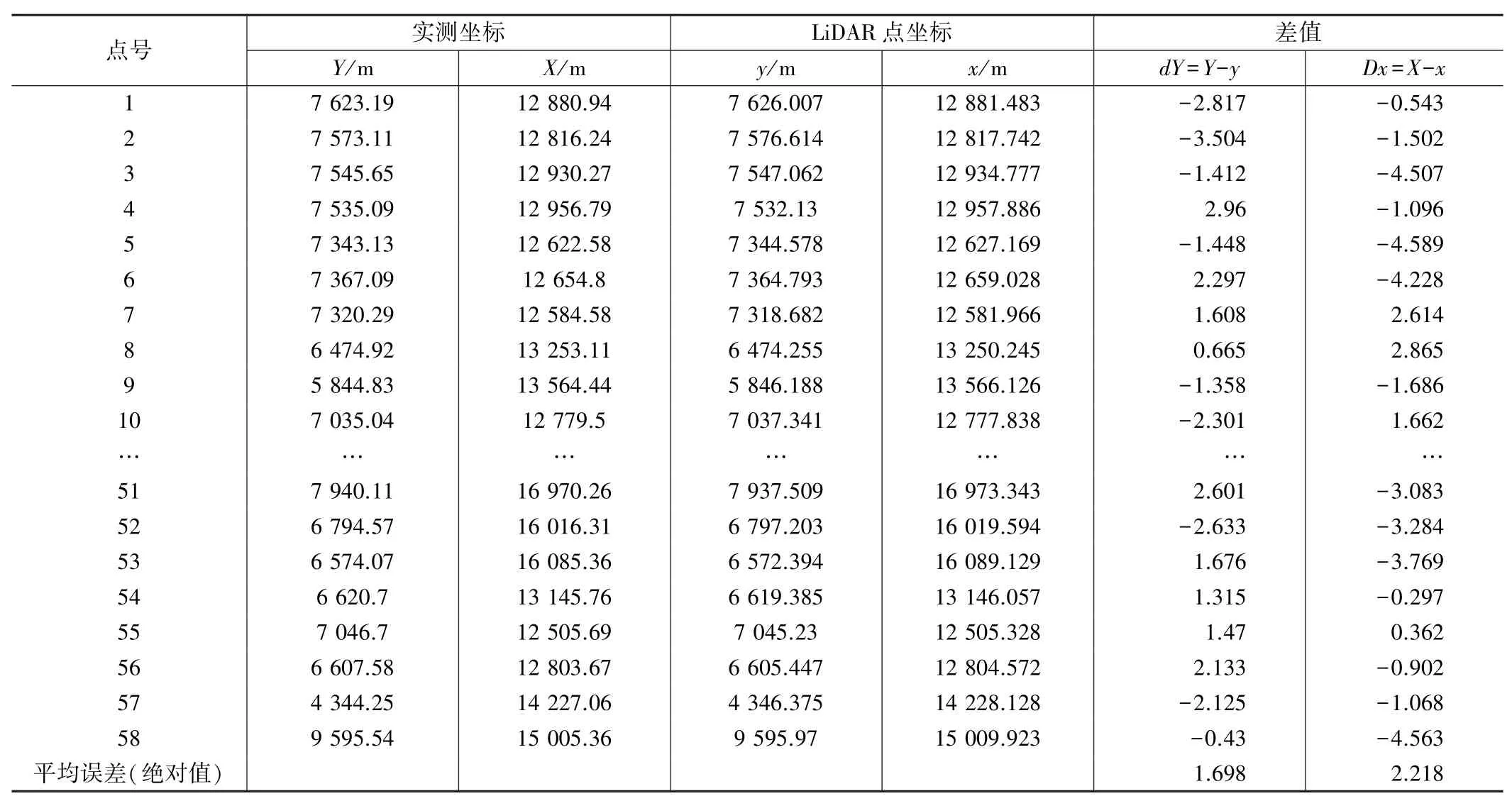
實(shí)測LiDAR點(diǎn)坐標(biāo)與對(duì)應(yīng)LiDAR點(diǎn)坐標(biāo)比較 表4
4 結(jié) 論
通過以上分析可知:ALTM3100激光雷達(dá)的高程精度無論是內(nèi)符合精度還是外符合精度都是符合其標(biāo)稱精度的,但是其平面精度由于檢測方法限制,仍不能很好地檢測其平面精度,按照3.3的檢測方法可知,實(shí)際的平面精度要遠(yuǎn)低于標(biāo)稱精度。
LiDAR數(shù)據(jù)的精度與諸多因素有關(guān),主要有如下三方面:
(1)硬件
LiDAR系統(tǒng)測量是測距-成像組合掃描儀在獲取地面點(diǎn)的圖像和激光測距數(shù)據(jù)的同時(shí)向GPS和姿態(tài)測量裝置發(fā)出一個(gè)同步脈沖信號(hào),分別由GPS、姿態(tài)測量裝置、激光測距儀進(jìn)行而這三者測量中都不可避免地帶有一定的誤差[6],從而導(dǎo)致LIDAR系統(tǒng)測量三維定位結(jié)果帶有誤差。由硬件部分產(chǎn)生的誤差主要有GPS定位誤差、測距誤差、姿態(tài)誤差、掃描角度誤差等。影響機(jī)載激光對(duì)地定位精度的各因素中,影響最大的是GPS定位精度,如果能優(yōu)化飛行作業(yè),并提高GPS的定位精度,在正常情況下垂直方向精度都能達(dá)到7 cm~8 cm的水平[5]。
(2)軟件
目前的LIDAR系統(tǒng)激光點(diǎn)數(shù)據(jù)處理并沒有一個(gè)統(tǒng)一的規(guī)范,各個(gè)廠家推出各自的數(shù)據(jù)處理軟件,其數(shù)據(jù)處理的依據(jù)、流程,算法也不為外界所知,同樣的數(shù)據(jù)采用不同的軟件處理可能就有系統(tǒng)誤差;另外激光點(diǎn)由WGS84坐標(biāo)向當(dāng)?shù)刈鴺?biāo)系轉(zhuǎn)化以及垂線偏差的存在都給最后的三維定位帶來誤差。
(3)被探測的物體
被探測的物體材質(zhì)不同、探測時(shí)接觸的反射面的角度不同都會(huì)直接影響到激光點(diǎn)的反射強(qiáng)度及測量精度。
目前,激光測高絕對(duì)精度可達(dá)15 cm;相對(duì)精度能達(dá)到5 cm;平面位置的絕對(duì)精度主要取決于飛行高度(平面位置精度約為飛行高度的1/1000)等參數(shù),通常為dm級(jí)到m級(jí)的精度[6],隨著人們認(rèn)識(shí)的不斷加深,如果采取一定的模型或方法去模擬或削弱這些誤差的影響,其精度指標(biāo)還有望得到進(jìn)一步提高。
[1] 劉艷華.機(jī)載激光掃描側(cè)高數(shù)據(jù)的應(yīng)用與試驗(yàn)[D].太原理工大學(xué)碩士論文,2006.
[2] 劉燕京.關(guān)于新一代激光雷達(dá)系統(tǒng)[M].測繪科學(xué),2003(3).
[3] 張小紅.機(jī)載激光雷達(dá)測量技術(shù)理論與方法[M].武漢:武漢大學(xué)出版社,2007.
[4] 王永平.機(jī)載LiDAR數(shù)據(jù)處理及林業(yè)三維信息提取研究[D].中國測繪科學(xué)研究院碩士論文,2006.
[5] 尤紅建.激光三維遙感數(shù)據(jù)處理及建筑物重建[M].北京:測繪出版社,2006.
[6] 劉經(jīng)南,張小紅,李征航.影響機(jī)載激光掃描測高精度的系統(tǒng)誤差分析[M].武漢大學(xué)學(xué)報(bào)—信息科學(xué)版,2002,27(2):111~117.
Precision Analysis of LIDAR Points
Ou Yangping
(Zhangzhou Institute of Surveying and Mapping,Urban Planning Buruan of Zhangzhou,Zhangzhou 363000,China)
LiDAR(Light Detection And Ranging)is an airborne laser detection and ranging system,using the device you canmeasure the three-dimensional coordinates of ground objects,with higher-performance equipments,ithas technically superiority in collecting three-dimensional geospatial informationprospects.This paper introduces the superiority of the LiDAR measurement technology and its applications,put forward themethod to check-up the precision of the laser points,take for example the Canada OPTECH ALTM3100,inspects its elevation and plane accuracy of the laser points,and put forwardamethod to improve the accuracy of the laser points.
light detection and ranging;DSM,DEM,DOM,DLG;check-up the precision
1672-8262(2013)04-122-05
P237
B
2012—10—12
歐陽平(1978—),男,工程師,主要從事測繪生產(chǎn)科研工作。