基于遺傳算法的地鐵列車自動(dòng)駕駛控制算法研究
2013-03-09 08:14:52
(浙江大學(xué)生物醫(yī)學(xué)工程與儀器科學(xué)學(xué)院 杭州 310027)
0 引 言
軌道交通列車的運(yùn)行要實(shí)現(xiàn)自動(dòng)化,對列車的運(yùn)行曲線進(jìn)行控制是其核心技術(shù).目前普遍使用的列車自動(dòng)運(yùn)行解決方案是列車自動(dòng)控制系統(tǒng)(automatic train control,ATC),一般包括:列車自動(dòng)監(jiān)控系統(tǒng)(automatic train supervision,ATS)、列車自動(dòng)防護(hù)系統(tǒng)(automatic train protection,ATP)及列車自動(dòng)駕駛系統(tǒng)(automatic train operation,ATO).其中ATO系統(tǒng)主要用于實(shí)現(xiàn)“地對車控制”,即通過地面信息實(shí)現(xiàn)對列車驅(qū)動(dòng)、制動(dòng)的控制,使用ATO系統(tǒng)能避免不必要的劇烈加速或減速,可明顯提高旅客舒適度和列車的準(zhǔn)點(diǎn)率,還可減少列車器件損耗[1-2].
M.Dominguez[3]提出的 ATO 速度曲線設(shè)計(jì)法中同樣指出,ATO對固定線路條件和關(guān)鍵點(diǎn)能夠生成速度曲線解絕對不唯一,但限制條件中運(yùn)行時(shí)間與能耗形成制約關(guān)系,將不同曲線的時(shí)間-能耗關(guān)系作圖,可以求出一組帕累托最優(yōu)曲線集,該組曲線便可以作為最優(yōu)曲線解集,再結(jié)合具體運(yùn)行限制設(shè)計(jì)生成不同級別的運(yùn)行目標(biāo)曲線,供運(yùn)行時(shí)選擇[4].另一種時(shí)分控制方式則以ATP系統(tǒng)為主導(dǎo),在給出ATO目標(biāo)曲線后,運(yùn)行時(shí)的時(shí)分管理方式不以修改目標(biāo)曲線為主,而是ATP系統(tǒng)在列車時(shí)分狀況與目標(biāo)偏差較大時(shí),通過調(diào)整停站時(shí)間,在時(shí)間富余時(shí)手動(dòng)使用惰行模式或者修改調(diào)度表等方法來控制列車時(shí)分正點(diǎn).但在客流高峰時(shí),根據(jù)列車情況變動(dòng)停站時(shí)間會對列車的運(yùn)營載客產(chǎn)生不好的影響,未經(jīng)預(yù)估地使用惰性模式,也可能降低乘客的乘坐舒適性,在機(jī)動(dòng)、效率和經(jīng)濟(jì)性上都不好.
以智能算法為核心的ATO通常不依靠固定的目標(biāo)曲線進(jìn)行控制,而在ATO車載設(shè)備上根據(jù)列車環(huán)境實(shí)時(shí)地做出決策,系統(tǒng)中時(shí)分控制功能以算法中的關(guān)于準(zhǔn)點(diǎn)、能耗等要求的具體規(guī)則來實(shí)現(xiàn).然而在具體線路上,采用固定的控制規(guī)則可能會造成與參數(shù)不斷變化的實(shí)際情況不符;且在控制策略模式方面還有待于對人類控制策略進(jìn)行深入研究,才能保證算法規(guī)則的完善.
1 遺傳運(yùn)行時(shí)分控制算法
1.1 ATO運(yùn)行時(shí)分控制的建模
ATO運(yùn)行時(shí)分控制優(yōu)化生成曲線的功能可分為2類:預(yù)先的全段控制曲線生成與運(yùn)行中的曲線調(diào)整(再生成).前者是離線的曲線生成,其固定兩站間初始速度為0;后者是在線的實(shí)時(shí)調(diào)整,用于列車運(yùn)行中,各種原因造成與初始曲線不匹配時(shí)重新生成可行的控制曲線.從算法的角度來說,前者與后者的區(qū)別只是初速度是否為零與運(yùn)行路程長度的區(qū)別而已,因此可以用共同的模型解決.
列車運(yùn)行環(huán)境中線路長為1 000m,加速度由-1 000~1 000的控制量決定(該量決定列車的動(dòng)力輸出,但本身只是操作參數(shù),故無單位)由于工作中的精細(xì)控制可以通過工況點(diǎn)的位置變化實(shí)現(xiàn),為方便搜索同時(shí)考慮與工況符合,將動(dòng)力控制量分為16個(gè)檔位.見表1.
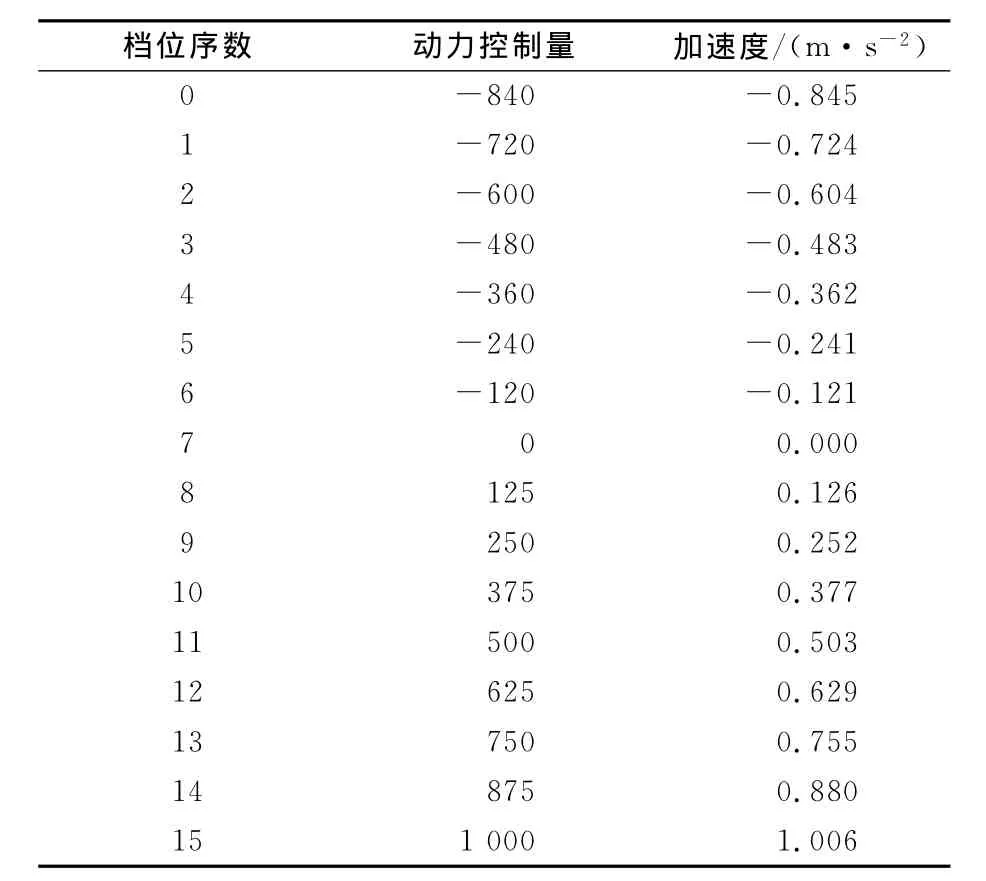
表1 動(dòng)力控制檔位
表1中加速度是理論值,未減去各種損耗.其中,前7個(gè)檔位是制動(dòng)工況,第8檔是惰行工況,后8個(gè)檔位是牽引工況.高加速度制動(dòng)會使乘客受到巨大沖擊,因此在制動(dòng)檔位設(shè)定的最大制動(dòng)取-840,低于-1 000的最大值動(dòng)力控制量,以提高舒適度.
本優(yōu)化算法中設(shè)定10個(gè)工況點(diǎn),每個(gè)工況點(diǎn)對應(yīng)于一個(gè)站間位置(第10點(diǎn)固定于1 000m處)和相應(yīng)的動(dòng)力輸出檔位如圖2所示,x軸為S值,y軸為動(dòng)力控制量.如圖1所示.
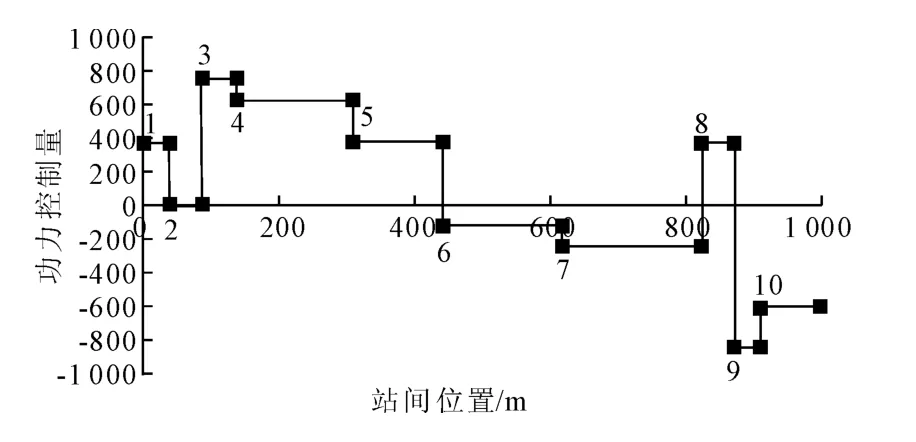
圖1 動(dòng)力控制量-路程曲線
以這10個(gè)工況點(diǎn)(共20個(gè)數(shù)據(jù))作為全路段的控制序列,將這個(gè)序列代入仿真計(jì)算得到全路段的速度、時(shí)間、能耗等信息.
解決ATO運(yùn)行時(shí)分問題要滿足其多目標(biāo)性,具體包括:(1)精準(zhǔn)停車.根據(jù)通行標(biāo)準(zhǔn),要求列車在已設(shè)定站點(diǎn)的停車誤差在±25cm范圍內(nèi)以保證列車在站點(diǎn)內(nèi)與上下車閘門配合;(2)時(shí)間準(zhǔn)點(diǎn).要求算法提供的控制方法能保證走行時(shí)間與規(guī)定值的誤差不大于5%;(3)速度防護(hù).給定算法相應(yīng)路段的最低限速曲線,在搜索曲線時(shí)要求能滿足限速要求,不超過給定速度的5%;(4)舒適性.為保證乘客乘坐的舒適性,列車加減速度的絕對值不能過大,加減速度的變化不能過于頻繁;(5)節(jié)能.列車在行駛途中要求以盡量低的速度運(yùn)行并盡量減少制動(dòng),在停靠站點(diǎn)時(shí)會考慮牽引力、阻力等因素,自動(dòng)調(diào)整速度以達(dá)到節(jié)能環(huán)保的目標(biāo).本研究中,遺傳算法的適應(yīng)度函數(shù)就依據(jù)前述目標(biāo)設(shè)計(jì)來制定.
1.2 遺傳算法設(shè)計(jì)[4-11]
1.2.1 編碼
根據(jù)本研究問題模型,分別用10位和4位(29<1 000<210,16=24)格雷碼編碼工況點(diǎn)的路程值與輸出值,并將二者級聯(lián)在一個(gè)染色體中,一個(gè)工況點(diǎn)有14位基因,模型中共有10個(gè)這樣的工況點(diǎn),進(jìn)一步級聯(lián)得到一個(gè)由140位基因串組成的染色體.編碼與解碼流程如圖2.
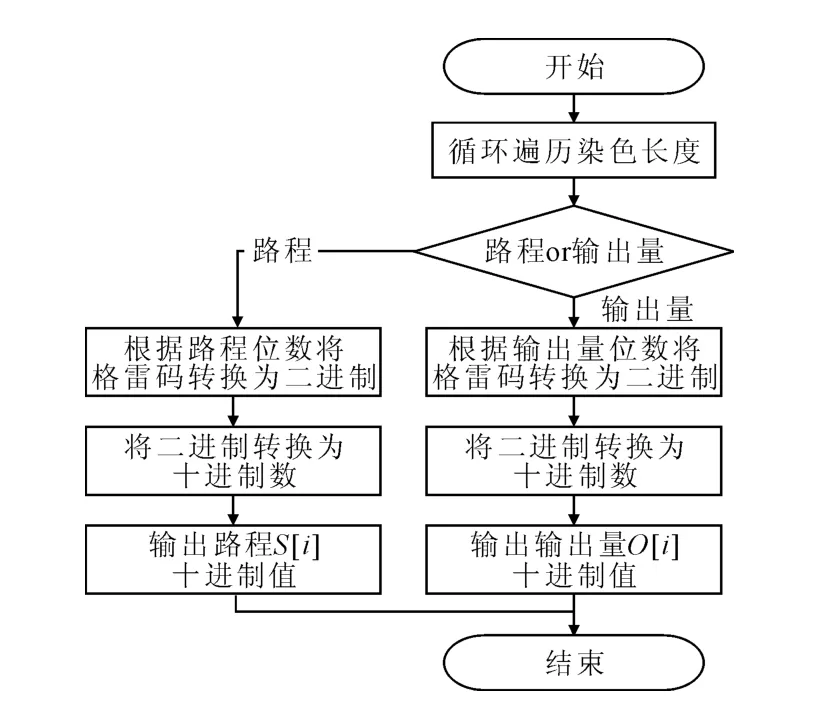
圖2 編/解碼函數(shù)流程
1.2.2 適應(yīng)度函數(shù)設(shè)定
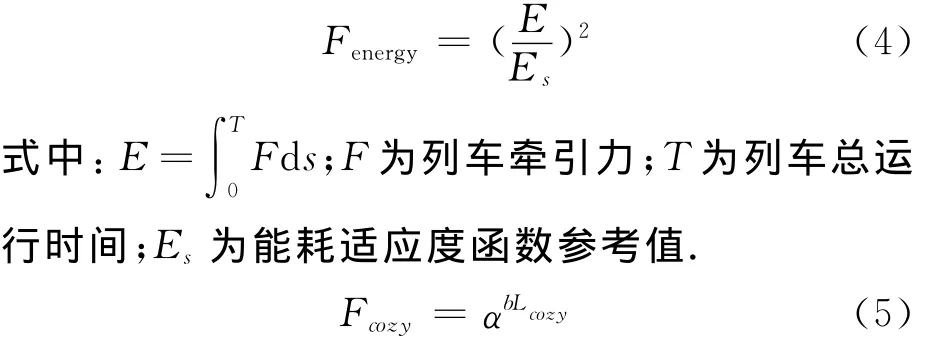
適應(yīng)度函數(shù)的選擇直接影響到遺傳算法的收斂速度以及求解性能.本問題的目標(biāo)函數(shù)是最小化問題,需要同時(shí)考慮多個(gè)適應(yīng)度變量的協(xié)同,且保證各個(gè)適應(yīng)函數(shù)在尺度上一致.分別計(jì)算各個(gè)變量的標(biāo)準(zhǔn)化函數(shù),再綜合求出適應(yīng)度函數(shù)為

式中:Fstop為定點(diǎn)停車適應(yīng)度函數(shù);FSR為限速適應(yīng)度函數(shù);Fenergy為能耗適應(yīng)度函數(shù);Fcozy為舒適度適應(yīng)度函數(shù);Ftime為時(shí)間適應(yīng)度;α,β,γ,δ,ε分別為各函數(shù)權(quán)重.

式中:Se為實(shí)際停車位置;So為目標(biāo)停車位置;Ss為容許誤差,取為0.25m.

式中:vI,vRi分別為工況點(diǎn)i處的速度與限速.
式中:a和b的取值調(diào)整指數(shù)函數(shù)的增長速度,取經(jīng)驗(yàn)值a=1.2,b=0.2.Lcozy是加速度超過額定加速度時(shí)的變化率求和,計(jì)算方法為為
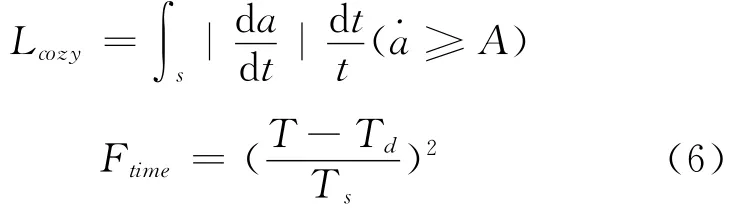
在定時(shí)模式下,應(yīng)以保證限速、定點(diǎn)、舒適度3個(gè)性能指標(biāo)為前提,最大限度滿足給定時(shí)間要求,較小考慮能耗要求.取值方法:將Td取為目標(biāo)時(shí)間,并將Ftime權(quán)重系數(shù)ε取為100 000.
最優(yōu)模式各權(quán)重系數(shù)均取為1.
1.2.3 懲罰因子
在列車時(shí)分曲線生成問題中一些不能用適應(yīng)度函數(shù)來消除的意外情況和限制條件,用特殊的懲罰因子來調(diào)整其最終適應(yīng)度.用到的懲罰因子為
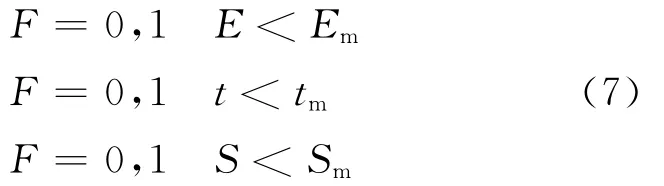
式中3個(gè)懲罰因子都是致死因子.在來自隨機(jī)計(jì)算的初始種群中會時(shí)常出現(xiàn)途中減速停車、甚至在起點(diǎn)便減速停車,這種現(xiàn)象會嚴(yán)重干擾有效解的搜索,需要及時(shí)清除.Em,tm,Sm等參量的取值依據(jù)來自該路段最小完成量.雖然致死因子能絕對排除破壞約束條件的個(gè)體,但約束過于嚴(yán)格時(shí)交叉算子和變異算子在搜索空間中生成新個(gè)體的能力就比較差[12],所以將3個(gè)值的閾限在最小完成量的基礎(chǔ)上進(jìn)一步降低,分別取為Em=1 000,tm=1 000,Sm=500.
1.2.4 選擇算法
遺傳算法使用選擇算子來對群體中的個(gè)體進(jìn)行優(yōu)勝劣汰操作,采用比例選擇法即賭盤法來實(shí)現(xiàn).

式中:f(bi)為個(gè)體bi的適應(yīng)度,賭盤法基于隨機(jī)操作,根據(jù)概率有放回地選擇M個(gè)個(gè)體放入作為下一代群體[13].
1.2.5 交叉算子
在遺傳算法中也使用交叉來產(chǎn)生新的個(gè)體.進(jìn)行交叉首先要配對,常用的方法是隨機(jī)配對,即把M個(gè)個(gè)體隨機(jī)組成M/2對,在每對內(nèi)部進(jìn)行交叉操作.本研究采用隨機(jī)配對下的單點(diǎn)交叉.這種方法不會對個(gè)體造成較大的模式傷害.
1.2.6 變異算子
直接采用簡單變異算子,其實(shí)現(xiàn)機(jī)理為:以變異概率Pm隨機(jī)指定某一位或幾位基因座上的基因值取反,即把1變成0,把0變成1.
變異概率是針對個(gè)體的某個(gè)基因座執(zhí)行的,因此對整個(gè)群體來說,變異概率的意義為

式中:B為每代中變異的基因數(shù)目;λ為個(gè)體基因串總長度.
1.2.7 種群設(shè)定
遺傳算法是對群體進(jìn)行操作的,所以必須為遺傳操作預(yù)先生成一個(gè)初始解群體,設(shè)定主要包括以下兩方面:初始種群生成、種群規(guī)模確定.將種群規(guī)模設(shè)定為25,初始種群在基因串上均勻地隨機(jī)生成0-1 2個(gè)值來形成.
1.2.8 終止迭代次數(shù)
終止代數(shù)T是表示遺傳算法運(yùn)行結(jié)束條件的參數(shù),程序運(yùn)行到指定代數(shù)時(shí)停止運(yùn)行,并輸出當(dāng)前群體中最佳個(gè)體作為最優(yōu)解.一般取值為100~1 000之間,根據(jù)實(shí)驗(yàn),通常在500代左右即可得到足夠好的個(gè)體,故本研究將T值設(shè)定為500.
2 程序整體流程圖
本研究使用某城市地鐵列車參數(shù)用于仿真模型.根據(jù)輸入的動(dòng)力控制量和步進(jìn)的前一刻速度、加速度值輸出當(dāng)前速度、加速度及路程值,得到每一步(50ms)下的速度、路程與加速度值.程序整體流程圖如圖3所示.
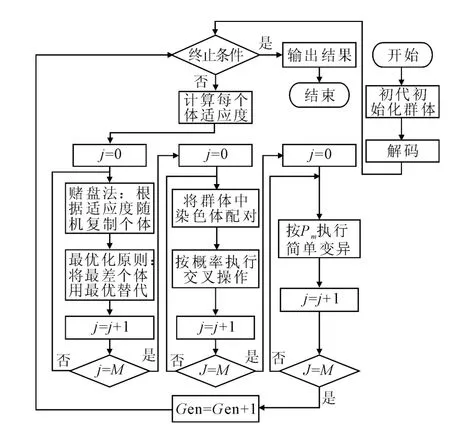
圖3 程序整體流程圖
3 仿真實(shí)驗(yàn)
首先求出在最節(jié)時(shí)模式下列車的運(yùn)行輸出.當(dāng)最大加速0~576m,最大減速576~1 000m取值時(shí),輸出為:運(yùn)行時(shí)間t=1 336×50ms,停車位置為S=1 000.28m,能耗E=394 670kJ;最高速度v=91.28km/h.
經(jīng)多次測試迭代次數(shù)、變異概率、交叉概率、種群大小等遺傳算法運(yùn)行參數(shù)后,能較快得到最高適應(yīng)度的運(yùn)行參數(shù)為:種群大小為25,交叉概率為0.65,變異概率為0.01.
以最節(jié)時(shí)模式作為參考做出以下仿真.
1)僅末段路程限速的定時(shí)模式搜索 給定條件為:限速0~900m,70km/h;900~1 000m,40km/h.定時(shí)要求2 000s.實(shí)驗(yàn)得到的適應(yīng)度-迭代次數(shù)圖像如4圖所示,實(shí)驗(yàn)結(jié)果輸出檔位圖見圖5,v-T 曲線見圖6,v-S 曲線見圖7.
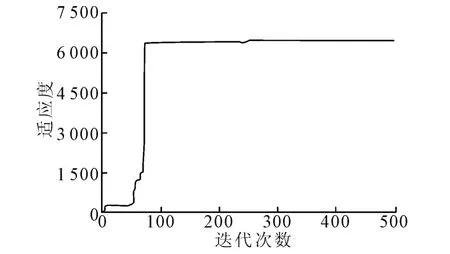
圖4 適應(yīng)度-迭代次數(shù)圖像
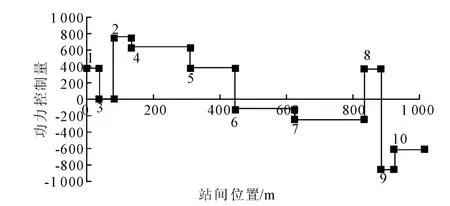
圖5 實(shí)驗(yàn)結(jié)果輸出檔位圖
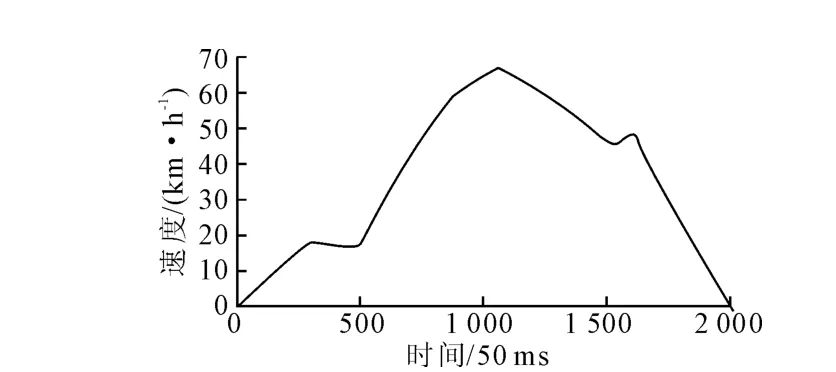
圖6 仿真v-T(速度-時(shí)間)曲線
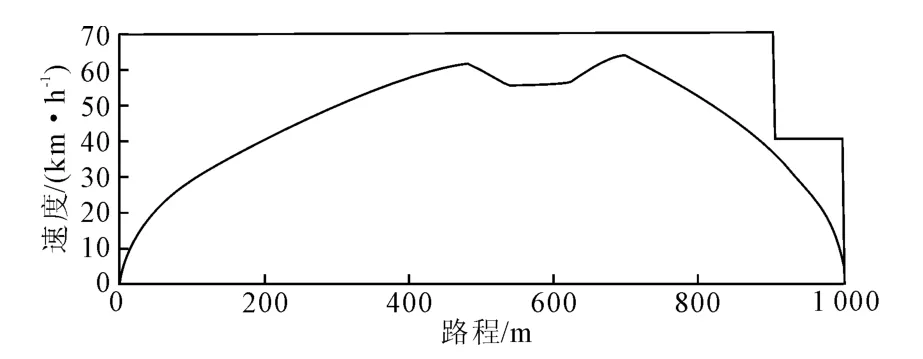
圖7 v-S(速度-路程)曲線與對應(yīng)限速
如圖5所示,列車初期保持較低的適應(yīng)度,在73代時(shí)適應(yīng)度突破了1 000,并迅速上升到6 000以上,此后基本維持不變,因此將最大迭代次數(shù)設(shè)為500應(yīng)該能夠滿足優(yōu)化目標(biāo)的精度要求.
其輸出時(shí)間為2 000×50ms比節(jié)時(shí)模式慢664×50ms,與給定的定時(shí)值2 000×50ms完全一致;能耗為22 011kJ,比節(jié)時(shí)模式節(jié)能44%;停車點(diǎn)為999.86m,精度14cm,小于規(guī)定的25 cm;最大速度小于規(guī)定的70km/h;適應(yīng)度函數(shù)值為6 469.
如圖6,得到的曲線在1 600s時(shí)存在一個(gè)尖峰,這種情況對乘客的舒適度有比較大的影響,這是因?yàn)樵摯螌?shí)驗(yàn)使用的舒適度適應(yīng)度函數(shù)不能有效甄別大的加速度變化.另一方面,考慮到遺傳算法的全局搜索特性,在定時(shí)狀態(tài)時(shí)間與速度限制等要求較死的前提下,適應(yīng)度函數(shù)的效應(yīng)也許不能得到足夠的表達(dá).
2)帶有途中限速降低的定時(shí)模式搜索 給定條件為:限速0~400m,60km/h;400~500 m,40km/h;500~900m,70km/h;900~1 000 m,30km/h.定時(shí)要求2 500s.輸出 V-S曲線如圖8所示.
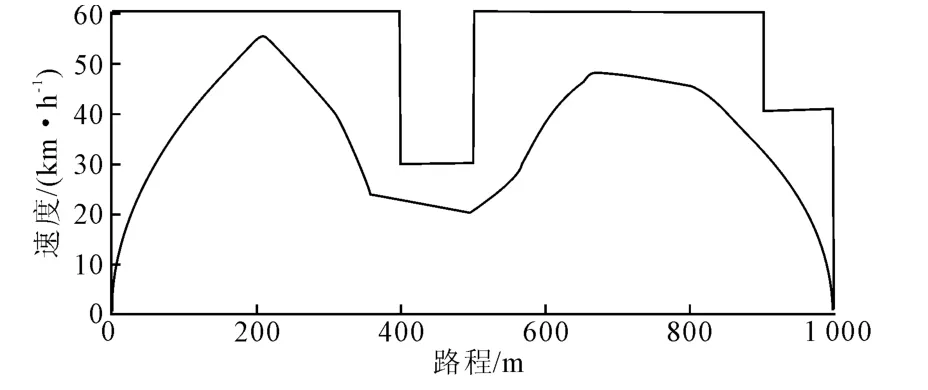
圖8 輸出v-S(速度-路程)曲線
其輸出時(shí)間為2 490×50ms,停車精度25 cm,能耗22 092.417kJ.各方面的精度可以滿足技術(shù)要求.
4 結(jié)束語
基于遺傳算法對城市軌道交通ATO運(yùn)行時(shí)分控制策略進(jìn)行仿真有較高的全局適應(yīng)度.算法效果良好,仿真過程中能較快得到最高適應(yīng)度的運(yùn)行參數(shù)為:種群大小25,交叉概率0.65,變異概率0.01.
僅末段路程限速的定時(shí)模式搜索仿真,輸出時(shí)間為2 000×50ms比節(jié)時(shí)模式慢664×50ms,與給定定時(shí)值2 000×50ms完全一致;能耗為22 011 kJ,比節(jié)時(shí)模式節(jié)能44%;停車點(diǎn)為999.86m,精度14cm,小于規(guī)定的25cm;最大速度小于規(guī)定的70km/h;適應(yīng)度函數(shù)值為6 469.
在帶有途中限速降低的定時(shí)模式搜索下的仿真中,得到的曲線不盡完美,表明本方法在舒適度函數(shù)的設(shè)計(jì)上還有改進(jìn)的空間.
[1]唐 濤,黃良驥.列車自動(dòng)駕駛系統(tǒng)控制算法綜述[J].鐵道學(xué)報(bào),2003,25(2):98-102.
[2]周家猷,唐 濤.列車自動(dòng)駕駛系統(tǒng)算法研究[J].中國科技信息,2008(13):306-307.
[3]DOMINGUEZ M.Optimal design of metro automatic train operation speed profiles for reducing energy consumptionJ.Journal of Rail and Rapid Transit 2011,225:463-470.
[4]王 艷,曾建朝.多目標(biāo)微粒群算法綜述.智能決策學(xué)報(bào)[J].2010,10(5):377-384.
[5]周 明,孫樹棟.遺傳算法原理及應(yīng)用[M].北京:國防工業(yè)出版社,1999.
[6]周 明,孫樹棟.遺傳算法原理及應(yīng)用[M].北京:國防工業(yè)出版社,1999.
[7]CHANG C S,SIM S S.Optimising train movements through coast control using genetic algorithms[DB/J].IEE Proceedings online no,19970797.
[8]周 明,孫樹棟.遺傳算法原理及應(yīng)用[M].北京:國防工業(yè)出版社,1999.
[9]周 明,孫樹棟.遺傳算法原理及應(yīng)用[M].北京:國防工業(yè)出版社,1999.
[10]OSHIMA H.Automatic train operation system by predictive fuzzy control[C]∥Artificial Intelligence for Industrial Applications,1988.IEEE AI’88,Proceedings of the International Workshop,1988:485-489.
[11]YASUNOBU S.Application of predictive fuzzy control to automatic train operation controller[C].Proc.of IECON’84,1984:657-662.
[12]劉 翔.城市軌道交通列車自動(dòng)運(yùn)行(ATO)最優(yōu)控制策略的研究[D].北京:北京交通大學(xué),2011.
[13]周 明,孫樹棟.遺傳算法原理及應(yīng)用[M].北京:國防工業(yè)出版社,1999.