直升機光纖陀螺IMU抗振設計及實時濾波方法
2013-03-19 08:23:04房建成
北京航空航天大學學報 2013年4期
任 剡 房建成
(北京航空航天大學 儀器科學與光電工程學院,北京 100191)
許 端
(北京航空工程技術研究中心,北京 100076)
慣性測量單元(IMU,Inertial Measurement U-nit)是直升機航姿測量系統的核心部件,利用3軸陀螺、加速度計敏感的角速度和加速度數據,計算載體當前的位置和姿態等信息[1],其中陀螺的性能主要決定了IMU的性能.光纖陀螺是一種基于Sagnac效應的角速度傳感器,具有結構簡單、啟動快、體積質量小和性價比高等優點,是直升機IMU理想角速度傳感器.
單軸光纖陀螺受結構、光纖繞環以及封裝限制,當載體振動頻率較高、振幅較大時,會產生零偏漂移和非線性、非高斯隨機噪聲[2],并導致FOG(Fiber Optic Gyroscope)捷聯IMU非互易性解算誤差,如何抑制光纖陀螺及其慣導系統的振動誤差是直升機航姿系統重要問題.目前,國內外研究機構和學者針對光纖陀螺及系統的振動誤差,提出了各種抑制措施[3],如加裝減振裝置[4];對光纖陀螺改進設計[5-7],提高抗振性能和環境適應性;采用有效的濾波方法降低振動引起的陀螺噪聲和漂移,消除高于載體姿態運動頻帶寬度的噪聲,提高姿態計算精度[8].但目前采用任何單一措施都不能完全解決光纖陀螺、IMU的測量誤差和噪聲問題.
針對直升機工作環境及小型FOG IMU振動特性,本文提出一種機械減振優化設計與高性能數據濾波相結合的組合抗振方法,建立減振系統數學模型,通過優化設計實現線、角運動通道解耦,從物理上屏蔽高頻有害干擾振動;設計實時、低時延數據濾波方法,抑制機械減振系統諧振頻點的振動干擾和信號噪聲,減小振動噪聲引起捷聯IMU非互易性解算誤差,最終保證FOG捷聯IMU工作穩定性和精度,為研制高性能直升機高性能航姿系統奠定基礎.
1 FOG IMU減振系統優化設計
從直升機航姿系統總體要求出發,為了準確測量載體位置和姿態,克服振動力學環境的限制,要求FOG IMU結構體諧振頻率必須高于載體振動截止頻率[8],同時還必須滿足對線、角振動沖擊的隔離要求.通過減振裝置屏蔽外界陣風、湍流以及發動機等高頻振動沖擊引起的慣性器件零偏漂移、非線性與非高斯噪聲.為了保證FOG IMU在線、角振動環境下的精度,應確保各自由度之間的振動相互解耦,并希望6個自由度的固有頻率相接近.基于減振裝置的FOG IMU線、角動力學模型可表示為

式中,m為IMU質量;a,Ω為IMU外界輸入線加速度和角速率矢量,cos(ωbt);g為重力加速度矢量;Δ為IMU質心相對外部載體線位移矢量;C,K為IMU減振裝置線阻尼系數和線彈性剛度;I為IMU轉動慣量矢量;θ為IMU相對外部載體扭轉角矢量;D,T為IMU減振裝置扭轉阻尼系數和抗扭彈性剛度;M0為加速度引起的扭轉力矩常值項,M0=m R(g+a),R為IMU質心到減振裝置中心的距離,FOG IMU 3軸線運動動力學方程為

式中,cki,kki分別為第k個減振器沿i軸向阻尼系數和彈性剛度;xk,yk,zk分別為第k個減振器相對減振裝置幾何中心的距離;n為減振器數量.根據式(2),FOG IMU 3軸角運動動力學方程可表示為


式中,Ix,Iy,Iz為 IMU 繞 x,y,z軸的轉動慣量;Ixy,Iyz,Izx為 IMU 對 x,y,z軸的慣性積.各自由度之間相互耦合,只有設計IMU質心和轉動慣量主軸坐標系原點重合,并以轉動慣量主軸作為參考坐標系,IMU 對 x,y,z軸的慣性積為 0,Ixy=Iyz=Ixz=0,即消除了各軸向轉動慣量的耦合.沿著參考坐標系各軸成組對稱安裝同一規格減振器,并設計該減振器沿3軸向具有相同減振特性,即kkj=kj=k;ckj=cj=c;xk=x;yk=y;zk=z,對稱力和力矩積分為0:

因此消除各自由度間彈性力和力矩耦合;同一規格減振器kkj/ckj為定值,消除各自由度間阻尼力和力矩耦合,即

由于FOG IMU質心和參考坐標系原點重合,可得

在外部線、角運動的激勵下,FOG IMU 6自由度動力學方程簡化為

式中,Ci為減振裝置沿i軸向阻尼系數,Ci=nc;Ki為減振裝置沿i軸向彈性剛度,Ki=nk;Di為減振器沿i軸扭轉阻尼系數,為減振裝置沿i軸向扭轉彈性剛度
減振裝置抑制諧振頻率點以上外界高頻干擾振動傳遞到FOG IMU,減小高頻振動、沖擊對光纖陀螺和石英加速度計的不利影響,載體外界線振動引起IMU相對線位移可表示為


式中

式中,ω0j為固有角振動頻率;為角運動振動頻率.從式(12)和式(13)可知,為了保證FOG IMU在線、角振動環境下的精度,應確保各自由度之間的振動相互解耦,減振裝置從物理角度避免了外界高頻振動傳遞到FOG IMU,因此消除了高頻干擾振動引起的零偏漂移和非線性、非高斯隨機噪聲.
2 近似線性相位IIR數字濾波方法
盡管減振裝置可以消除外界高頻振動對FOG IMU的影響,但根據質量-阻尼-剛度系統特性,在減振裝置諧振頻率點附近將產生有害的“共振”現象;通過增大減振裝置阻尼系數可減小其影響,但對于優化直升機FOG IMU性能而言,該影響卻不可忽視;另外,載體的中低頻振動也會引起FOG IMU隨機噪聲和非互易性解算誤差,因此需要采用濾波技術進一步提高系統的振動環境下工作穩定性和精度.要求該濾波器運算量小、可實現實時解算,同時要求具有時間延遲小的優點[9].根據系統實時、小時延的需求,本文提出在減振裝置優化基礎上的近似線性相位IIR(Infinite Impulse Response)低通濾波方法.
設定一個IIR濾波器,利用最小二乘估計使其在優化跟蹤所期望頻率特性的線性相位FIR(Finite Impulse Response)濾波器的單位沖激響應[10].設濾波器的激勵信號為x(k);FIR濾波器輸出為 yf(k);其參數為 h0,h1,…,hN-1;IIR 濾波器的輸出為 y(k);其參數為 a1,a2,…,an,b0,b1,…,bn,則有
設計N-1階線性相位FIR濾波器傳遞函數為

n階IIR濾波器的傳遞函數表示為

以IIR濾波器參數作為狀態估計變量X=[a1,a2,…,an,b0,b1,…,bn]T;以其輸入輸出組成量測矩陣 H=[-y(k-1),…,-y(k-n),x(k),…,x(k-n)],建立最小二乘估計方程為

則最小二乘遞推算法如下:

式中,P(k)為系統估計量的協方差矩陣;r(k)為遺忘因子,為兼顧最小二乘收斂速度和靈敏度取0.980 < r(k)<0.998.
3 減振裝置及數字濾波器設計
IMU由3個石英撓性加速度計、3個光纖陀螺組成.綜合考慮成本、體積和精度等因素,加速度計和固態角速度陀螺采用成熟國產GJ-27石英撓性加速度計和11-FA2型光纖陀螺,其中GJ-27石英撓性加速度計精度優于1mg;11-FA2型光纖陀螺精度優于3(°)/h;這兩種慣性原件均為高可靠性固態元件,平均無故障工作時間為30×105h,具有價格便宜、可靠性高及較高精度等特點.
3.1 基于減振裝置FOG IMU結構設計
通過優化3個加速度計的安裝位置和方位,減小了加速度計測量點相對減振裝置幾何中心的距離,設計3個光纖陀螺和加速度計安裝面的平面度和正交度,減小系統安裝誤差Eij;在一定尺寸、重量條件下,增加IMU轉動慣量,可有效提高系統抗角振動性能,減小陀螺抖動引起的尺寸效應、圓錐漂移等誤差[11-12].
在IMU結構減振裝置和方式方面保證減振器的機械強度、減振效率和位移等符合系統的抗振動沖擊要求,根據上文中的優化設計準則,FOG IMU采用兩側對稱八點相同減振器與外部載體固聯,提高各自由度間振動去耦效應,并使各固有頻率相互接近,獲得較窄的頻率分布,避免載機振動和沖擊引起IMU共振,從而影響到系統的測量精度.
3.2 近似線性相位IIR濾波器設計
以設計11階IIR低通濾波器為例,按表1中FIR濾波器指標參數,設計逼近過程需要的線性相位FIR低通濾波器Hf(ejω)

表1 FIR低通濾波器設計指標
在IIR低通濾波器線性相位時域逼近過程中,以高斯白噪聲為激勵信號,通過最小二乘參數估計算法式(19)估計IIR濾波器參數,最小二乘參數估計初值為0.表2為最終設計完成的11階IIR濾波器性能統計,圖1為應用IIR濾波器后的效果對比圖.可以看出線性相位IIR濾波器噪聲抑制能力提高至50 dB,通帶紋波降低至0.27 dB,且運算量與18階FIR濾波器相當.

圖1 IIR濾波器濾波效果對比

表2 最小二乘優化后11階IIR濾波器性能
4 驗證試驗
為了驗證FOG IMU機械減振與數據濾波相結合的振動抑制方法的有效性和實用性,將該方法應用于自主研制的FOG IMU,開展了地面車載驗證實驗.將系統原理樣機與一臺高精度慣導系統一起安裝在一輛北京212吉普車進行跑車動態實驗,高精度慣導系統為成熟航空產品,陀螺誤差小于 0.01(°)/h,加速度計誤差小于 50 μg,其慣性導航姿態誤差小于0.03°.二者跑車橫滾軸對比情況如圖2所示,試驗結果表明:利用本文提出的減振系統優化設計原則,減低了外部復雜振動環境引起的器件級和捷聯算法非互易性誤差,提高抗振性能和環境適應性;采用本文提出的小運算量、低時延近似線性相位IIR濾波器,可有效降低振動引起的陀螺噪聲和漂移,消除高于載體姿態運動頻帶寬度的噪聲,提高姿態計算精度.采用綜合誤差標定補償后,FOG IMU橫滾角誤差小于1°,滿足直升機導航信息與航向姿態參考系統對慣性測量單元的精度要求.
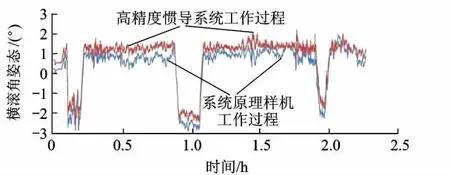
圖2 FOG IMU與高精度慣導跑車實驗橫滾軸對比圖
5 結論
本文提出的FOG IMU機械減振與數據濾波相結合的振動抑制方法,可實現線、角通道振動解耦,減小光纖陀螺捷聯慣導誤差.實驗結果表明:采用該方法能有效地抑制外界干擾振動和系統噪聲,保證FOG IMU工作穩定性和精度,為研制直升機高性能航姿系統奠定基礎.
References)
[1] Wis M,Colomina I.Dynamic dependent IMU stochastic modeling for enhanced INS/GNSS navigation[C]//Satellite Navigation Technologies and European Workshop on GNSS Signals and Signal Processing(NAVITEC),2010 5th ESA Workshop.Shandong:IEEE,2010:1 -5
[2]陳文海,牟旭東,舒曉武,等.光纖陀螺的振動特性研究[J].光學儀器,2003,25(5):19 -23 Chen Wenhai,Mou Xudong,Shu Xiaowu,et al.Study on characteristic of vibration of fiber optical gyroscope[J].Optical Instruments,2003,25(5):19 - 23(in Chinese)
[3]舒建濤,李緒友,吳磊,等.高精度光纖陀螺振動誤差抑制技術[J].紅外與激光工程,2011,40(11):2201 -2206 Shu Jiantao,Li Xuyou,Wu Lei,et al.Vibration error restrain technology for high-precision fiber optic gyroscope[J].Infrared and Laser Engineering,2011,40(11):2201 - 2206(in Chinese)
[4] Aritaka O,Sbinji M,Ryuji U,et al.Development of fiber-optic gyroscope with environmental ruggedness[C]//Fiber Optic Gyros:15th Anniversary Conference 1991.Los Angeles:SPIE,1992(1585):82-88
[5]孟照魁,邵洪峰,徐宏杰,等.固膠對保偏光纖環的影響[J].北京航空航天大學學報,2006,32(8):958-961 Meng Zhaokui,Shao Hongfeng,Xu Hongjie,et al.Effect caused by coating adhesive on polarization-maintaining fiber coil[J].Journal of Beijing University of Aeronautics and Astronautics,2006,32(8):958 -961(in Chinese)
[6]宋凝芳,張春熹,李立京,等.數字閉環光纖陀螺振動誤差分析[J].北京航空航天大學學報,2004,30(8):702 -704 Song Ningfang,Zhang Chunxi,Li Lijing,et al.Analysis of vibration error in digital closed-loop fiber optic gyroscope[J].Journal of Beijing University of Aeronautics and Astronautics,2004,30(8):702-704(in Chinese)
[7]易康,李廷志,吳文啟.FLP濾波算法在光纖陀螺信號預處理中的應用[J].中國慣性技術學報,2005,13(5):58 -62 Yi Kang,Li Tingzhi,Wu Wenqi.Application of forward linear prediction filter in signal process of FOG[J].Journal of Chinese Inertial Technology,2005,13(5):58 -62(in Chinese)
[8]張志鑫,張大偉.捷聯慣組減振系統角振動、線振動共振頻率理論分析[J].中國慣性技術學報,2009,17(6):654 -657 Zhang Zhixin,Zhang Dawei.Theory analysis on resonance frequencies of linear vibration and torsional vibration of strapdown IMU damping system [J].Journal of Chinese Inertial Technology,2009,17(6):654 -657(in Chinese)
[9] Brandenstein H,Unbehauen R.Weighted least-squares approximation of FIR by IIR digital filters[J].IEEE Transaction Signal Processing,2001,49(4):558 -568
[10] Jiang A,Kwan H K.IIR digital filter design with new stability constraint based on argument principle[J].IEEE Transaction on Circuits and Systems,2009,56(3):583 -593
[11] Li JL,Fang JC,Du M.Error analysis and gyro-bias calibration of analytic coarse alignment for airborne POS[J].IEEE Transaction on Instrumentation and Measurement,2012,61(11):3058-3064
[12] Zhang L D,Lian JX,Wu M P,et al.Research on auto compensation technique of strap-down inertial navigation system[C]//International Asia Conference on Information in Control,Automation and Robotics.Bangkok:IEEE,2009:350 -353
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
天天愛科學(2020年6期)2020-09-10 07:22:44
藝術啟蒙(2018年7期)2018-08-23 09:14:18
數學物理學報(2017年6期)2018-01-22 02:26:40
家庭影院技術(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16