基于伺服控制技術(shù)的注塑機(jī)自動(dòng)門(mén)研究
2013-03-20 08:34:24謝子方金文靜王文婷
機(jī)床與液壓 2013年8期
關(guān)鍵詞:系統(tǒng)
謝子方,金文靜,王文婷
(寧波安信數(shù)控技術(shù)有限公司,浙江寧波315801)
隨著自動(dòng)化行業(yè)的不斷發(fā)展,自動(dòng)門(mén)系統(tǒng)發(fā)展迅速,在電梯、數(shù)控機(jī)床和注塑機(jī)等領(lǐng)域得到了廣泛的應(yīng)用。
目前國(guó)內(nèi)外各種注塑機(jī)大都采用交流異步電機(jī)、減速機(jī)和變頻器組成的自動(dòng)門(mén)系統(tǒng)。交流異步電機(jī)配變頻器解決方案有著成本低的優(yōu)勢(shì),但也存在著能耗高、控制性能差、缺乏安全性的缺點(diǎn),在關(guān)門(mén)過(guò)程中即使有人卡在門(mén)里面也無(wú)法自動(dòng)停止,容易造成人員傷亡和電機(jī)燒毀事故,存在安全隱患。近幾年交流伺服電機(jī)的大批量使用,使其成本不斷降低,它在自動(dòng)門(mén)機(jī)系統(tǒng)的應(yīng)用成為今后自動(dòng)門(mén)發(fā)展的方向[1]。由于伺服電機(jī)有著良好的控制性能,能夠?qū)崿F(xiàn)柔性無(wú)沖擊開(kāi)關(guān)門(mén),在關(guān)門(mén)途中如果有人卡住了能夠自動(dòng)檢知并停止關(guān)門(mén),保證了人員的安全,對(duì)于提高自動(dòng)門(mén)的安全性具有重要意義[2]。
1 系統(tǒng)組成及工作原理
該伺服自動(dòng)門(mén)系統(tǒng)主要由交流永磁同步伺服電機(jī)、伺服驅(qū)動(dòng)器、減速器、行程開(kāi)關(guān)、皮帶、定滑輪和動(dòng)滑輪等組成。
該伺服電機(jī)內(nèi)置了磁編碼器[3],運(yùn)動(dòng)過(guò)程中能夠?qū)崟r(shí)反饋運(yùn)行的距離,但是斷電后又會(huì)丟失當(dāng)前的位置信息,所以在關(guān)門(mén)到底位置裝了一個(gè)行程開(kāi)關(guān),作為基準(zhǔn)零位位置,每次通電后的首次動(dòng)作都需要先關(guān)門(mén)到碰到行程開(kāi)關(guān)位置歸零位。注塑機(jī)控制器界面可以設(shè)置開(kāi)門(mén)距離的大小,其數(shù)值通過(guò)一個(gè)IO 點(diǎn)發(fā)脈沖信號(hào)給伺服驅(qū)動(dòng)器,脈寬代表設(shè)定的開(kāi)門(mén)距離。脈沖周期為1 s,開(kāi)門(mén)最大距離為4 000 mm,脈寬為設(shè)定距離相應(yīng)的百分比。比如設(shè)定開(kāi)門(mén)距離為40 mm則脈寬為0.01 s,設(shè)定為4 000 mm 則脈寬為1 s。
系統(tǒng)采用的設(shè)備主要參數(shù)見(jiàn)表1。

表1 系統(tǒng)設(shè)備參數(shù)
2 運(yùn)動(dòng)控制算法
傳統(tǒng)的異步電機(jī)自動(dòng)門(mén)系統(tǒng)由于沒(méi)有編碼器無(wú)法反饋當(dāng)前位置,其運(yùn)行速度只有2 擋,快速和慢速。啟動(dòng)和停止前一段距離為慢速擋,中間段為快速擋,兩擋速度的切換通過(guò)行程開(kāi)關(guān)來(lái)控制,其速度的變換存在突變,沖擊問(wèn)題嚴(yán)重,對(duì)減速器、皮帶輪和電機(jī)的使用壽命都會(huì)產(chǎn)生不良影響。文中所述的伺服自動(dòng)門(mén)系統(tǒng)由于電機(jī)內(nèi)置編碼器,可以實(shí)時(shí)反饋當(dāng)前位置信息,故采用先進(jìn)的S形加減速控制算法,在運(yùn)行過(guò)程中通過(guò)加速度的均勻變化實(shí)現(xiàn)速度的平滑過(guò)渡,減少了過(guò)沖和沖擊,提高了系統(tǒng)的柔性和使用壽命。
2.1 S曲線加減速算法[4-6]
正常情況下S形曲線加減速的運(yùn)行過(guò)程可分為7段:加加速段、勻加速段、減加速段、勻速段、加減速段、勻減速段、減減速段,如圖1所示。

圖1 S型加減速曲線
圖中vs為起始速度,ve為終點(diǎn)速度,vc為指令速度,vmax為系統(tǒng)運(yùn)行的最大速度。圖中符號(hào)說(shuō)明如下:
t為時(shí)間坐標(biāo);
tk(k=1,2,…,7)為各個(gè)階段的過(guò)渡點(diǎn)時(shí)刻;
vi(i=1,2,…,7)為各個(gè)階段的過(guò)渡點(diǎn)時(shí)刻的速度;
τk(k=1,2,…,7)為局部時(shí)間坐標(biāo),表示以各個(gè)階段的起始點(diǎn)作為零點(diǎn)的時(shí)間,τk=t-tk-1;
Tk(k=1,2,…,7)為各個(gè)階段的持續(xù)運(yùn)行時(shí)間;
A、D為加速度;J1,J3,J5,J7為加加速度;L為整個(gè)運(yùn)行長(zhǎng)度。
一般情況下電機(jī)的正向和反向的驅(qū)動(dòng)能力是一致的,因此可以假設(shè)電機(jī)正向和反向最大加速度相等,即Amax=Dmax,并認(rèn)為:電機(jī)加速度曲線從0 達(dá)到最大值和從最大值到0 所用的時(shí)間相等,此時(shí)間定為系統(tǒng)的一個(gè)特性時(shí)間常數(shù)tm,tm越大柔性越大,加減速時(shí)間越長(zhǎng);tm小沖擊大,加減速時(shí)間短;tm=0時(shí),S曲線退化為直線。根據(jù)假設(shè)有:

從而:

tm的計(jì)算公式為:

成立的前提條件是:運(yùn)行過(guò)程中最大加速度能達(dá)到。若這個(gè)條件不成立,則式(1)由下式代替:

這樣,只需要確定3個(gè)最基本的系統(tǒng)參數(shù):系統(tǒng)最大速度vmax、最大加速度Amax、加加速度J 便可確定整個(gè)運(yùn)行過(guò)程。通過(guò)上述假設(shè),可以得到加加速度、加速度、速度和位移等的計(jì)算公式。
加加速度Jerk 公式如下:
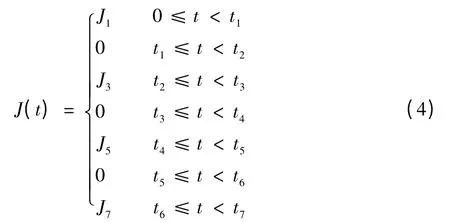
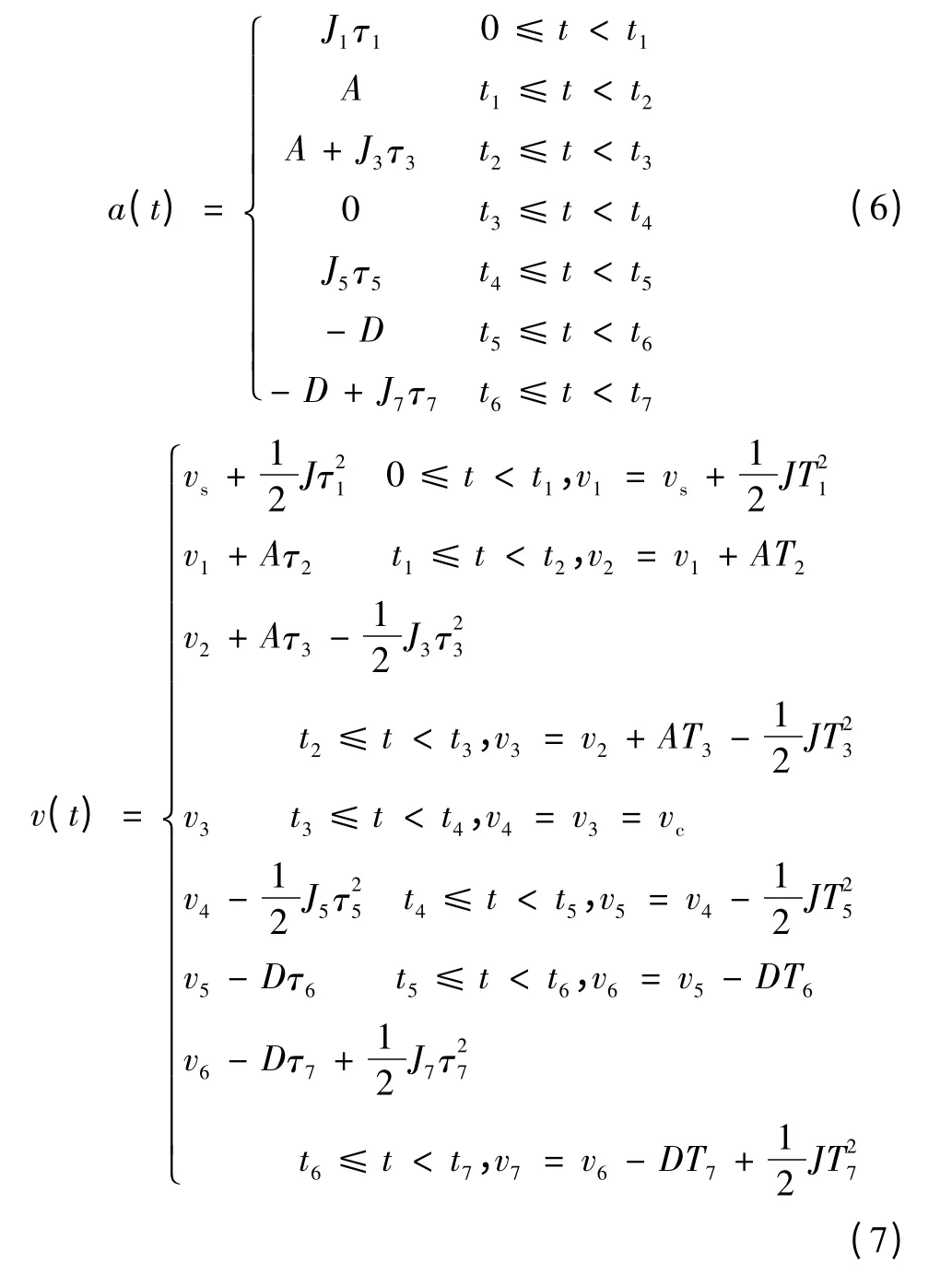
根據(jù)圖1和式(4),可以將加速度a(t)、進(jìn)給速度v(t)和位移s(t)表示為:

通過(guò)推導(dǎo),加速度a(t)、進(jìn)給速度v(t)和位移s(t)計(jì)算公式為:
由此可得勻加速段運(yùn)行時(shí)間為:
勻速段的運(yùn)行時(shí)間為:

勻減速段運(yùn)行時(shí)間為:

加速區(qū)長(zhǎng)度為:

減速區(qū)長(zhǎng)度為:
2.2 系統(tǒng)實(shí)際運(yùn)行情況分析
該伺服自動(dòng)門(mén)系統(tǒng)安裝在海天MA系列1 000 t的注塑機(jī)上運(yùn)行,與同樣規(guī)格的使用KEB 異步電機(jī)的自動(dòng)門(mén)作比較,情況見(jiàn)表2。
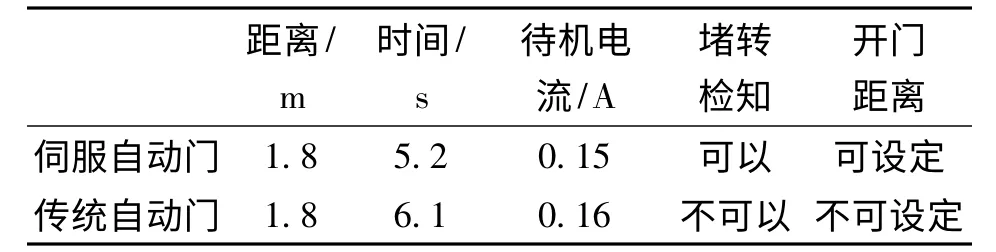
表2 運(yùn)行情況對(duì)比
由表2可見(jiàn):該伺服自動(dòng)門(mén)相比傳統(tǒng)的使用異步電機(jī)的自動(dòng)門(mén)在功能、安全性和性能上更加具有優(yōu)勢(shì)。實(shí)際運(yùn)行中,伺服自動(dòng)門(mén)開(kāi)關(guān)門(mén)速度過(guò)渡平滑,沖擊明顯小于傳統(tǒng)自動(dòng)門(mén)。關(guān)門(mén)中測(cè)試卡住物體堵轉(zhuǎn)時(shí),能自動(dòng)停止輸出,避免了傳統(tǒng)自動(dòng)門(mén)堵轉(zhuǎn)時(shí)輸出電流增大容易燒毀現(xiàn)象,提高了安全性。
3 結(jié)束語(yǔ)
伺服自動(dòng)門(mén)與傳統(tǒng)的自動(dòng)門(mén)相比,具有功能強(qiáng)、可靠性高、結(jié)構(gòu)緊湊、質(zhì)量輕、沖擊小、使用壽命長(zhǎng)和安全性好等優(yōu)點(diǎn),是自動(dòng)門(mén)系統(tǒng)的發(fā)展趨勢(shì),在將來(lái)的大中型注塑機(jī)中將被廣泛應(yīng)用。
【1】張霞,榮祖蘭.客車(chē)電動(dòng)車(chē)門(mén)防夾控制系統(tǒng)設(shè)計(jì)研究[J].制造業(yè)自動(dòng)化,2011,33(3):67-70.
【2】崔啟明.動(dòng)車(chē)組自動(dòng)門(mén)控制系統(tǒng)的研究[D].長(zhǎng)春:吉林大學(xué),2009.
【3】鄧之江.一種電動(dòng)門(mén)電機(jī)用磁編碼器:中國(guó),201020144410.0[P].2010-11-17.
【4】ERKORKMAZ Kaan,ALTINTAS Yusuf.High Speed CNC System Design:Part I:Jerk Limited Trajectory Generation and Quintic Spline Interpolation[J].International Journal of Machine Tools & Manufacture,2001,41(2):1323-1345.
【5】郭新貴,李從心.S曲線加減速算法研究[J].機(jī)床與液壓,2002(5):60-62.
【6】李曉輝,鄔義杰,冷洪濱.S曲線加減速控制新方法的研究[J].組合機(jī)床與自動(dòng)化加工技術(shù),2007(10):50-53.
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(hào)(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識(shí)經(jīng)濟(jì)·中國(guó)直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32
