基于模糊自適應PID控制器的起重機精確定位技術研究
2013-03-31 07:11:32趙典強寶民劉陳
機床與液壓 2013年7期
趙典,強寶民,劉陳
(第二炮兵工程大學202教研室,陜西西安710025)
起重機作為一種運輸機械被廣泛應用于港口碼頭、冶金工業(yè)、建筑工程等方面。隨著現(xiàn)代工業(yè)生產規(guī)模的不斷擴大,工業(yè)生產對起重機的定位精度要求越來越高,研究起重機的精確定位技術已成為提高工業(yè)生產效率的重要途徑。當前我國起重機定位控制系統(tǒng)大多采用編碼器作為位置檢測裝置,與人工目測指揮相配合,當起重機制動時,起重機的輪軸會發(fā)生打滑現(xiàn)象,而編碼器的數(shù)值卻不會發(fā)生變化,不能準確地檢測起重機的位置,因此無法對起重機進行精確定位,并且使用一段時間后需要重新檢定。
作者針對傳統(tǒng)定位系統(tǒng)中存在的問題,結合實驗室項目的開展,研究起重機的精確定位技術。首先建立系統(tǒng)中的變頻器、交流異步電機以及檢測裝置的數(shù)學模型,推導出整個系統(tǒng)的傳遞函數(shù);其次,結合模糊控制策略和PID控制方法設計了模糊自適應PID控制器,實現(xiàn)系統(tǒng)的閉環(huán)控制;最后,在MATLAB Simulink環(huán)境中進行仿真,通過仿真結果與實驗結果的對比,檢驗此方法的可行性。
1 系統(tǒng)數(shù)學模型的建立
1.1 變頻器環(huán)節(jié)
變頻器環(huán)節(jié)的輸入為控制電壓,輸出為定子側電壓和頻率,變頻器的輸入電壓uc范圍是010 V,相應的變頻器的輸出頻率即交流異步電機定子側的電壓的頻率f為050 Hz。與交流異步電機相比,變頻器的時間常數(shù)比較小,可以忽略變頻器的動態(tài)響應過程,此時可以將變頻器看為比例環(huán)節(jié),其比例關系為:

式中:K1為電壓頻率轉換系數(shù),變頻器的輸入電壓uc為010 V,輸出頻率f為050 Hz,所以得到電壓頻率轉換系數(shù)K1=5。
當交流異步電機處于穩(wěn)態(tài)時,定子每相電壓與每相感應電動勢的關系為:

Rs為定子每相繞組電阻。

f1為定子側電壓頻率;
Lm為定轉子互感;
Ls為定子自感;
當定子電勢較高時,可忽略定子繞組中的漏阻抗壓降,此時定子電壓近似等于定子電勢,但當定子電壓頻率f1較低時,定子的感應電動勢變小,而項則基本不變,定子繞組中的漏阻抗壓降此時不能忽略,定子電壓與定子感應電勢已經不再近似相等。為了使恒壓頻比控制方式在低頻時能夠應用,往往采用定子電壓補償措施,即在低頻時適當提高定子電壓以補償定子繞組中的漏阻抗壓降的影響。補償后的特性曲線如圖1所示。

圖1 恒壓頻比控制特性曲線
根據(jù)不同的實際情況可以設置不同的補償電壓,設補償電壓為U0,則定子電壓U1與變頻器的輸出頻率f的關系為:

當忽略低頻定子補償電壓時,則有:

式(1)、(3)、(4)即為變頻器的數(shù)學模型。
1.2 交流異步電機環(huán)節(jié)
交流異步電機是一個高階次、非線性、強耦合的多變量系統(tǒng),但與機械傳動的動態(tài)過程相比,電機的電磁瞬變過程非常短暫,基本可以忽略不計,交流異步電機的電磁轉矩Te為:

式中:np為交流異步電機極對數(shù);
U1為定子每相電壓;
ω1為交流異步電機的同步角速度;
Rs為定子電阻;
Rr為轉子電阻;
s為交流異步電機的轉差率。
當交流異步電機處于額定工作狀態(tài)時,電機轉速接近同步轉速,電機轉差率很小,并且 Rs與ω1(L1+L2)為同一數(shù)量級,所以Rs>>Rrs≈Rrω1(L1+L2),則電機的電磁轉矩可化簡為:

將轉差率s=(n1-n)/n1(n為電機的實際轉速),電機的同步轉速n1=60 f/np代入上式得:
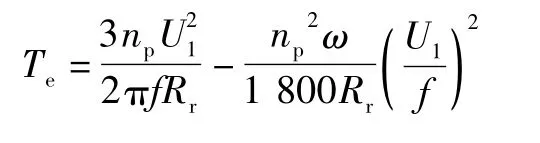
為便于計算,簡化變頻器模型,忽略定子的補償電壓,此時電磁轉矩為:

對于恒轉矩負載,則電機的運動方程為:

式中:TL為負載轉矩;
J為轉動慣量;
ω為電機轉速。
將式(6)代入式(7)后求拉氏變換得:

1.3 減速器環(huán)節(jié)
交流異步電機的轉軸通過減速器與起重機的輪軸相連接,在系統(tǒng)建模中,可視為比例環(huán)節(jié),其數(shù)學模型為:

式中:n為電機的轉速;
n1為車輪的轉速。
1.4 檢測裝置環(huán)節(jié)
該系統(tǒng)的檢測裝置采用拉線式位移傳感器,其輸入為起重機的位置信號,輸出為電壓模擬量信號,可近似視為比例環(huán)節(jié),因此,其數(shù)學模型可表示為:

式中:Kf為位移傳感器的增益;
Uf為反饋電壓;
y為起重機的位移。
根據(jù)上述各環(huán)節(jié)的數(shù)學模型可得系統(tǒng)數(shù)學模型為:
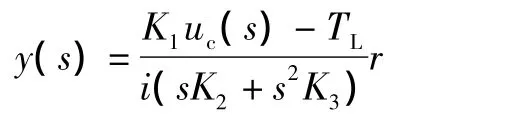
式中:r為起重機車輪半徑。
2 模糊自適應PID控制器的設計
2.1 模糊自適應PID控制器的思想
模糊自適應PID控制器又稱模糊PID參數(shù)自整定控制器,是將PID控制器和模糊控制器串聯(lián)在一起,以系統(tǒng)給定值和控制對象實際值的偏差e和偏差率ec作為模糊控制器和PID控制器的輸入,用模糊控制器實時調整PID的控制參量KP、KI、KD。該控制方式實時性強,控制精度高,不會出現(xiàn)常規(guī)PID控制器系統(tǒng)超調、易振蕩的現(xiàn)象。其控制原理圖如圖2所示。
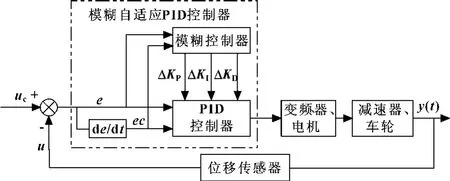
圖2 模糊自適應PID控制器原理圖
在模糊自適應PID控制器中,3個控制參數(shù)對系統(tǒng)運行狀態(tài)的影響各不相同,所有的PID控制器對控制系統(tǒng)的校正都是建立在3個控制參數(shù)的基礎上;模糊控制器的作用是根據(jù)起重機的運行狀態(tài)實時修改PID的3個控制參數(shù)即KP、KI、KD,使系統(tǒng)具有良好的動、靜態(tài)性能。
2.2 模糊自適應PID控制器的設計
取系統(tǒng)中變頻器的輸入信號和反饋信號的誤差e及其變化ec作為模糊控制器的兩個輸入變量,輸出變量為PID控制參數(shù)的修正量ΔKP、ΔKI、ΔKD。表1給出模糊自適應PID控制器的各變量。

表1 模糊自適應PID控制器設計表
根據(jù)模糊控制規(guī)則建立的基本思想和控制過程中系統(tǒng)的實際情況,采用經驗歸納法和根據(jù)對手工操作系統(tǒng)的測量生成控制規(guī)則相結合的方法,可得適合該系統(tǒng)的模糊控制規(guī)則。其語言推理形式可表示為:
如E=Ei,EC=ECj,則U=Uij(i=1,2…,m; j=1,2,…,n)
其中:Ei、ECj、Uij分別是定義在E、EC上的模糊集。由此得到的ΔKP的模糊控制規(guī)則表如表2所示,限于篇幅原因,不再給出ΔKI、ΔKD的模糊控制規(guī)則表。

表2 ΔKP的模糊控制規(guī)則表
通過模糊控制得到的只是PID控制器中3個參數(shù)的修正量ΔKP、ΔKI、ΔKD,還必須將其與初始參數(shù)KP0、KI0、KD0合成,才能對系統(tǒng)性能進行調節(jié)。參數(shù)合成公式為:

式中:KP、KI、KD為PID控制3個參數(shù)的取值;
KP0、KI0、KD0為PID控制3個參數(shù)的初始值;
ΔKP、ΔKI和ΔKD為3個參數(shù)的修正值。
3 系統(tǒng)的仿真分析與實驗驗證
根據(jù)手冊得到電機的參數(shù)為:定子電阻 Rs= 3.712 Ω,轉子電阻Rr=2.789 Ω,定轉子互感Lm= 0.295 H,定子自感 Ls=0.311 H,轉子自感 Lr= 0.311 H,極對數(shù)np=2,轉動慣量J=1 kg·m2。
模糊自適應PID控制器的Simulink仿真模塊如圖3所示。

圖3 模糊自適應PID控制器的Simulink仿真模塊
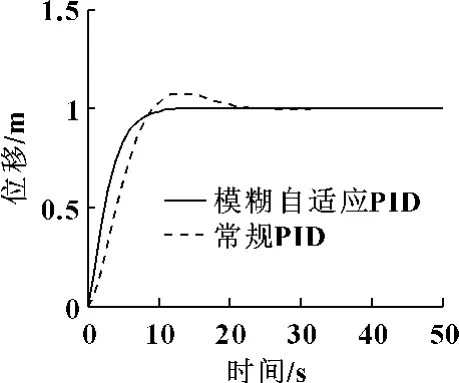
圖4 系統(tǒng)的階躍響應仿真曲線
對系統(tǒng)輸入階躍響應信號,得到的系統(tǒng)在模糊自適應PID控制器和常規(guī)PID控制器作用下的響應曲線如圖4所示。
由仿真結果可以看出:系統(tǒng)采用常規(guī)PID控制器時,響應速度較慢,在t=25 s之后系統(tǒng)才趨于穩(wěn)定狀態(tài),并且系統(tǒng)有較大的超調量,此時需要反轉電機才能使系統(tǒng)位于設定的位置,不利于系統(tǒng)的穩(wěn)定;采用模糊自適應PID控制器時,響應速度快,在t=10 s左右系統(tǒng)已經處于穩(wěn)定狀態(tài),并且?guī)缀鯖]有超調。在該系統(tǒng)中,模糊自適應PID的控制效果要遠好于常規(guī)PID的控制效果,大大增強了系統(tǒng)的魯棒性。

圖5 系統(tǒng)的階躍響應實驗曲線
為了驗證模糊自適應PID控制器實際的控制效果,在試驗臺上進行實驗。經過多次重復實驗發(fā)現(xiàn),當e和ec量化因子K1= 2,K2=2.3,ΔKP、ΔKI和ΔKD的比例因子分別為K3=12,K4=5,K5= 14時,模糊自適應PID控制器的控制效果最好。圖5給出了位移指令為1 m時系統(tǒng)采用模糊自適應PID控制器的階躍響應實驗曲線與仿真曲線。
由系統(tǒng)的實驗曲線可以看出:系統(tǒng)在t=11 s左右時有輕微的超調,但對系統(tǒng)的影響不大,系統(tǒng)穩(wěn)定時的位移為1.006 m,即該系統(tǒng)的定位誤差為6 mm。在仿真曲線中,由于控制器的參數(shù)是由實驗確定的,并非仿真效果最好時的參數(shù),其仿真結果稍有不同,響應速度稍慢。仿真曲線與實驗曲線比較相近,能夠較好地反映系統(tǒng)的實驗結果,證明了系統(tǒng)模型的正確性和模糊自適應PID控制器設計的合理性。
4 結論
針對起重機的精確定位技術,建立了系統(tǒng)各環(huán)節(jié)的數(shù)學模型,推導出其傳遞函數(shù),并設計了應用于該系統(tǒng)的模糊自適應PID控制器。在Simulik環(huán)境中,對系統(tǒng)采用模糊自適應PID控制器和常規(guī)PID控制器分別進行仿真,結果表明:作者設計的模糊自適應PID控制器控制性能更優(yōu)越。最后通過實驗結果與仿真結果的對比,證明了該系統(tǒng)數(shù)學模型的正確性和控制器設計的合理性,進一步說明了該方法的可行性。
【1】陶永華.新型PID控制及其應用[M].北京:機械工業(yè)出版社,2005.
【2】曾光其,胡均安.模糊控制理論與工程應用[M].武漢:華中科技大學出版社,2006.
【3】趙鑫.基于變頻技術的高溫液壓流量控制系統(tǒng)[D].北京:北京交通大學,2010.
【4】徐滬萍,魯凱生.基于模糊PID控制器的門式起重機大車定位控制系統(tǒng)研究[J].船海工程,2011(3):105-107.
【5】張國良.模糊控制及其MATLAB應用[M].西安:西安交通大學出版社,2002.
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
科教新報(2022年12期)2022-05-23 06:34:16
今日農業(yè)(2021年14期)2021-10-14 08:35:28
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(2020年3期)2020-11-06 09:07:42
海峽姐妹(2020年8期)2020-08-25 09:30:18
測控技術(2018年5期)2018-12-09 09:04:50
家庭影院技術(2017年9期)2017-09-26 03:41:45
電子制作(2017年7期)2017-06-05 09:36:13
