一種采用自夾緊模糊控制的纜索檢測機器人設計
2013-03-31 07:11:48秦理程良倫
機床與液壓 2013年7期
關鍵詞:檢測
秦理,程良倫
(廣東工業大學自動化學院,廣東廣州510006)
改革開放以來,斜拉索橋作為現代橋梁的新形式,在中國得到了廣泛的應用,纜索作為斜拉橋的主要構件之一,造價占整座橋梁的25%~30%。20世紀80年代之后興建起大批的斜拉橋,目前正在逐步進入老化期,由于拉索長期處于露天服役狀態,經20來年風吹雨淋日曬,其聚乙烯護套會產生不同程度的硬化和開裂現象,從而使護套內的鋼絲束發生腐蝕;另外,隨機振動也會引起鋼絲的磨損,這些都會嚴重影響拉索的使用壽命,給斜拉橋的正常使用埋下嚴重的隱患。
目前的纜索檢測機器以電驅動式和氣動蠕動式兩種機器人為典型[1],爬行時需要施加一個夾緊力在滾動輪與纜索之間,夾緊力保證輪與纜索之間產生一個足夠大的摩擦力,來克服自身重力、風力,保證爬升過程中不發生墜落或打滑。然而纜索的表面通常都涂有防止聚乙烯護套老化的防護漆,夾緊過度將會損壞防護漆并且使纜索產生變形,對纜索造成二次傷害[2]。斜拉橋纜索機器人設計的關鍵問題是:如何在輪與纜索之間施加一個大小合適的夾緊力,夾緊力過大會造成拉索損傷;夾緊力不夠,機器人由于摩擦力不足很難運動,在斜纜索上容易晃動,當檢測機器人沿較大傾斜度的纜索爬升時,必須在纜索表面施加較大的夾緊力,以保證與纜索之間產生的摩擦力足以克服自重、負載及風力等而不下落或打滑。目前可查的幾款機器人都是采用彈簧施壓的方式產生夾緊力,該夾緊力均按機器人垂直狀態的最大力進行設計,不能根據所攀爬的纜索狀態自動進行調整,這顯然對于減少機器人爬行的二次損壞和合理選用電機功率將產生重大影響[3],同時結構復雜,體積龐大,質量太大,從而給機器人的驅動、控制、安全保護帶來一系列的問題。
針對以上不足,作者在改進現有纜索機器人結構設計之上,設計了一種帶自夾緊執行機構的纜索機器人,能根據纜索狀態進行夾緊力的自適應模糊控制。根據打滑檢測器對爬行狀態進行判斷,氣動夾緊裝置的夾緊壁視需求以最適宜的夾緊力對纜索進行夾持,可實現只用一個檢測機器人就能檢測同一座斜拉橋上所有直徑的纜索。自夾緊功能的實現對于纜索機器人的結構改進和保護纜索免受檢測二次傷害,將具有積極的意義[4]。
1 自夾緊纜索機器人的系統設計
針對一款電驅動式纜索機器人進行自夾緊設計,機器人由主從動輪、驅動電機、傳動系統、氣動夾緊裝置、輔助夾緊彈簧和連接件組成。驅動輪選擇有較大摩擦因數的橡膠材料做成,能與整個纜索圓周表面飽滿接觸。整個機器人結構較緊湊、具有較高的機動能力,機器人外部機械結構如圖1所示。
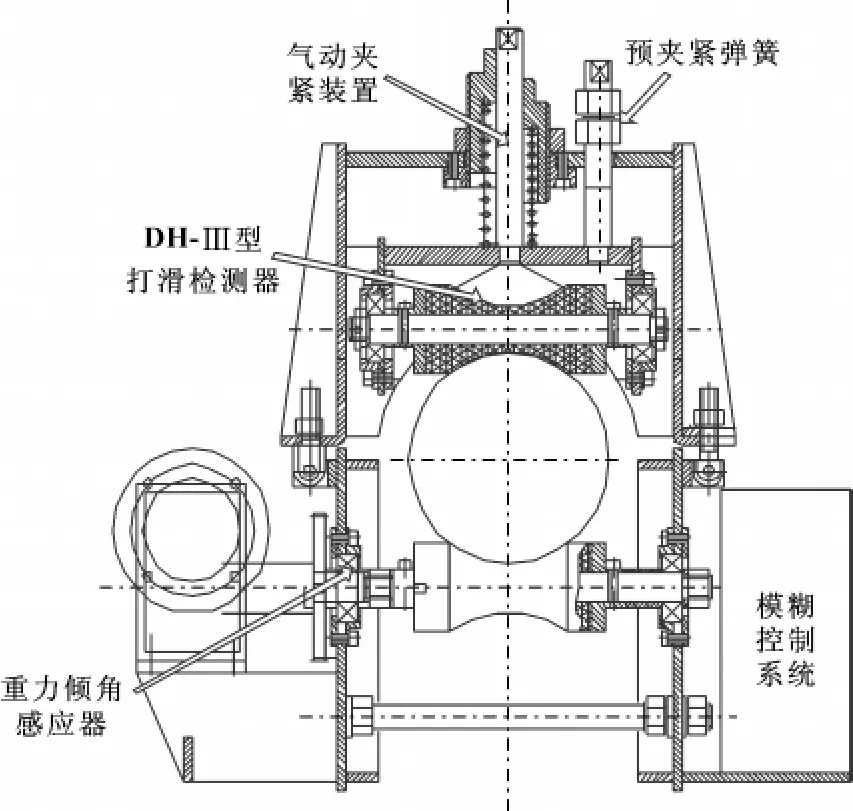
圖1 機器人外部機械結構圖
夾緊機構包括輔助夾緊和模糊控制夾緊:輔助夾緊裝置的作用是將機器人安裝到纜索上后,提供一個壓緊力,使機器人附著于纜索表面,處于臨界平衡狀態;輔助夾緊裝置中,由50CrVA彈簧鋼制作成壓縮彈簧,彈簧上端裝有預緊螺母,可以調整彈簧提供給橡膠輪的預壓力大小,同時夾緊彈簧上還裝有限位剛性部件,限制纜索的最大檢測直徑。模糊控制夾緊的執行機構采用氣動裝置,在模糊控制器下達指令后,氣壓泵驅動壓桿向下運動,壓桿可以在氣缸內自動伸縮,夾緊觸頭實現對橡膠輪依照給定力進行夾持。
機器人安裝到斜纜索上后,主輔夾緊機構共同施加夾緊力,將上下滾輪緊壓于斜拉橋纜索上。夾緊力合力的大小決定了整套裝置的驅動能力,在足夠的摩擦力作用下,機器人緊緊貼合在纜索上,在驅動電機的帶動下上行與下行[5]。
2 纜索檢測機器人自適應模型的建立
將機器人安裝到纜索上后,必須把輔助夾緊彈簧調整到合適位置,使機器人處于臨界平衡狀態,此時纜索機器人的自重全部落在纜索上方的輪子上,如圖2所示。作者對其進行受力分析,機器人受斜面法線方向的力N是重力G的法向分量和預夾緊力FN之和即:N=FN+G·cosα,α為纜索的傾斜角 (0~ 90°)。沿切線方向向上的摩擦力F與重力G的切向分量彼此平衡,有G·sinα=μN=F,μ為滾輪和纜索表面的摩擦因數。此時
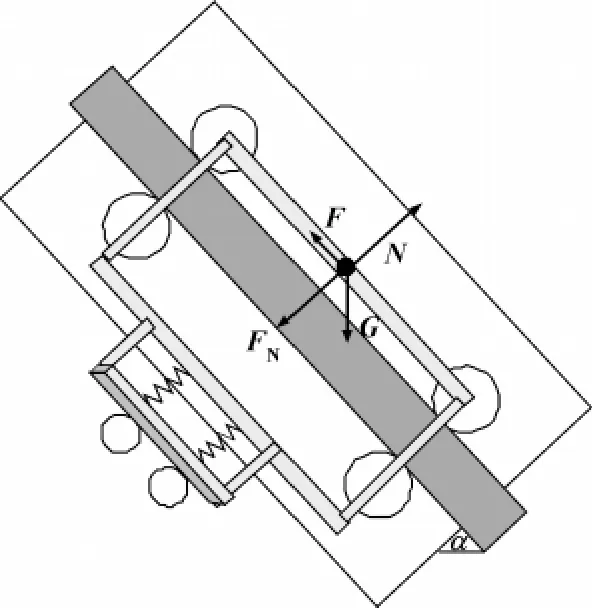
圖2 機器人輔助夾緊力分析
在機器人正常運動時,輔助夾緊和模糊控制夾緊裝置共同起作用,假設纜索機器人處在勻速運動狀態,對其進行受力分析。為使分析簡單明了,不考慮各構件質量及彈性變形,將機器人各構成部分按功能與布局進行簡化,形成圖3所示簡化模型[6]。其中G1,G2,G3,G4,Ge,Gf為簡化后各部分質點;N1,N2,N3,N4為纜索各個輪的彈力;f1、f2、f3、f4為纜索表面對各個滾輪的摩擦力[7]。

圖3 機器人簡化模型
根據靜力學平衡方程,有:
如圖3所示,以主動輪和纜索的接觸點A為支點,用質點分析法建立力矩平衡方程,且設d為纜索直徑;μ為滾輪與纜索表面摩擦因數;L為圖中質點e、f到纜索表面距離。由動力矩和阻力矩平衡,有下式:


由于N1<<N2,故
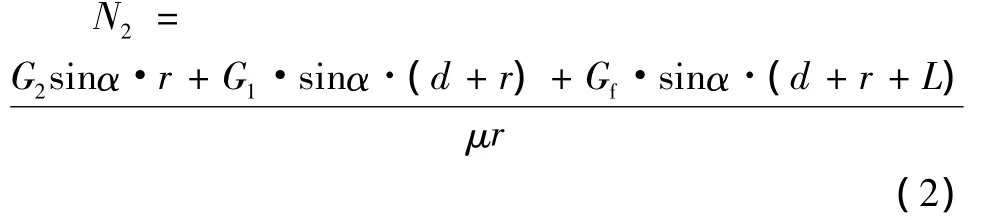
由于機器人上下結構具有對稱性,以接觸點B為支點,得出N4亦同。
對式 (2)進行分析,由于同一根纜索傾斜角α、纜索半徑d是常量,且機器人的輪半徑r、質點f到纜索的距離L都恒定,唯一不定因素是動摩擦因數μ。機器人在檢測作業時必須經過纜索表面的導流線和一些產生銹蝕的凹凸槽,動摩擦因數μ是一個變化值。因為不能直接測量μ,作者采用DH-III型打滑檢測器。打滑檢測器附帶一個觸輪隨同機器人在纜索上同步滾動,觸輪帶動檢測器內傳動軸,軸連接的輪片切割光電信號,傳感頭再把所檢測的光電信號變成脈沖信號,送入89C51單片機在單位時間內計數,然后同電機編碼器反饋的脈沖信號相比較,做出大于、等于或小于的判斷。如果觸輪測得的脈沖信號與編碼器反饋的脈沖信號不同步并低于反饋脈沖時,說明機器人滾輪打滑,此時模糊控制器發出指令,氣動夾緊裝置工作,增大夾緊力。
3 自夾緊模糊控制模型
(1)輸入輸出量的確定
從精度和速度兩方面考慮,采用觸輪脈沖信號與編碼器脈沖信號的偏差和偏差變化率兩個變量作為輸入。
兩輸入單輸出模糊控制器基本原理如圖4所示,通過比較電機編碼器反饋的脈沖信號和打滑檢測器檢測的脈沖信號,將其差值R和差值的變化率ΔR送入模糊控制器進行模糊運算,再經過解模糊得出所需壓緊力值,向纜索檢測機器人氣動夾緊執行機構發出動作指令。

圖4 二輸入單輸出模糊控制原理圖
根據纜索檢測機器人自適應模型的特點,模糊控制器采用兩輸入單輸出的控制方式,即讀取R、ΔR兩個變量數據作為模糊控制器的輸入量。
(2)模糊化
取5個模糊子集來描述R、ΔR兩個變量,取5個模糊子集為:NB(負大),NS(負小),ZE (零),PS(正小),PB(正大)。并把它們的論域化為7個等級 (-3,-2,-1,0,1,2,3),模糊子集的隸屬函數選為三角形,模糊集合的隸屬函數分布在論域 (-3,-2,-1,0,1,2,3)上。

圖5 輸入變量R、ΔR隸屬函數
在兩輸入單輸出控制方式中,采用的控制規則是“if A and B then C”,因此模糊關系矩陣Q可表示為

其中:A為電機編碼器反饋的脈沖信號和打滑檢測器檢測的脈沖差值R;
B為電機編碼器反饋的脈沖信號和打滑檢測器檢測的脈沖差值的變化率ΔR。
那么任一狀態下的氣動夾緊裝置壓緊力模糊值可表示為

式中:C為所需的氣動夾緊裝置壓緊力值。
根據實際情況,可以先得出模糊關系矩陣Q,見表,再由式 (4)算出某一狀態下的氣動夾緊裝置壓緊力模糊值C,最后根據C值確定氣動夾緊裝置的工作狀態S。

表1 氣動夾緊裝置壓緊力模糊規則表
(3)氣動夾緊裝置工作狀態的確定
在實際爬桿機器人系統中,氣動夾緊裝置采用的是活塞式結構,可以提供較大的推力。按照實際夾緊的需要可將輸出推力分為很高、高、中高、中、中低、低擋。
根據實驗可確定:當脈沖偏差為0≤C≤0.15,時,用低壓力擋;當脈沖偏差為0.15≤C≤0.3時,用中低壓力擋;當脈沖偏差為0.3≤C≤0.45,用中壓力擋;當脈沖偏差為0.45≤C≤0.6,用中高壓力擋;當脈沖偏差為0.6≤C≤0.75,用高壓力擋;當脈沖偏差為0.75≤C≤1用很高壓力擋。
由此可得到氣動夾緊裝置的工作狀態,如表2所示。

表2 氣動夾緊裝置的工作狀態
4 實地測試
對纜索檢測機器人在不同傾角條件下進行測試,在試驗架傾角為30°~90°時,氣動夾緊裝置輸出的夾緊力隨傾斜角度不同變化,機器人在實驗過程中爬行穩定,符合模糊控制模型的預期結果,如圖6所示。
在進行多次的地面試驗之后,在惠州合生大橋上實地測試該樣機。在帶有導流槽的纜索上反復進行長距離爬升試驗,共測試12根不同直徑、傾斜角的纜索,結果證實:帶自適應夾緊裝置的檢測機器人爬升平穩,在纜索上基本沒有發生相對旋轉,經多次往返運動沒有對纜索表面的聚乙烯護套造成損傷,如圖7所示。

圖7 纜索機器人實地測試
5 小結
斜拉橋拉索機器人設計的關鍵問題是使機器人獲得對纜索的夾緊力,夾緊力過大會造成對拉索的二次損傷;夾緊力不夠,機器人不能實現爬行。人為施加夾緊力一般都是按照檢測機器人在垂直狀態爬行的最大力施加,不能適應拉索不同傾角和繞度的變化,過大的夾緊力容易給纜索造成二次傷害,同時也給機器人的驅動、控制、安全保護帶來一系列的問題。這也是雖然國內外針對拉索檢測機器人開展的研究不少,但實用商品化的產品不多的一個重要原因[8]。
作者在對纜索檢測機器人進行分析的基礎上,提出一種斜纜索檢測機器人自夾緊模糊控制方案,可根據纜索機器人自身重力與纜索狀態進行模糊控制,根據不同的纜索直徑,調節夾緊彈簧的伸縮對纜索進行夾持,提供合適的夾緊力,可實現只用一個檢測機器人就能檢測同一座斜拉橋上所有不同直徑的纜索。
【1】袁建明,武新軍,康宜華,等.可重構斜拉索磁性無損檢測機器人技術研究[J].武漢理工大學學報:交通科學與工程版,2008,32(3):442-445.
【2】王亞斌,周憶.一種輕型斜拉橋纜索檢測機器人的結構與動力學分析[J].機械與電子,2008(1):48-50.
【3】鄭李明,王興松.斜拉橋拉索檢測機器人控制系統設計[J].電子機械工程,2008,24(6):57-60.
【4】柳忠彬,周憶.斜拉橋拉索檢測機器人的自適應研究[J].機械與電子,2009(12):48-51.
【5】羅均.纜索維護機器人系統的研制[J].上海交通大學學報,2000,34(3):360-362.
【6】張家梁.氣動蠕動式纜索維護機器人的研制[J].機器人,2002,22(9):397-401.
【7】OH J K,LEE A Y,OH S M,et al.Design and Control of Bridge Inspection Robot System[C]//IEEE Int Conf on Mechatronics and Automation,2007:3634-3639.
【8】XU F,WANG X.Design and Experiments on a New Wheelbased Cable Climbing Robot[C]//IEEE/ASME International Conference on Advanced Intelligent Mechatronics,2008:418-423.
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48
