軟起動器控制的礦山皮帶機輸送系統研究*
2013-04-03 09:32:10羅金盛
金屬礦山 2013年2期
羅金盛
(華僑大學信息科學與工程學院)
作為礦山的高效連續運輸設備,礦山皮帶機具有大運量、長距離、連續輸送等特點。同時礦山皮帶機便于集中自動控制,運行可靠、經濟,已成為礦山機電一體化的關鍵設備[1]。
由于礦山產能擴大,皮帶輸送機朝著大功率、更長距離、更大運量、高速等方向發展。對皮帶輸送機的起動要求進一步提高,主要體現在對起動電流加以限制。本研究探討一種帶有速度控制功能的雙閉環礦山皮帶機軟起動器,可以在限制軟起動過程電流的同時,實現速度時間最優跟隨。
1 異步電動機軟起動器基本原理分析
1.1 異步電動機等效電路
圖1為異步電動機T型等效電路圖,其中r1表示定子電阻,r'2表示已折算到定子側的轉子電阻,rm表示勵磁電阻,x1表示定子漏電抗,x'2表示轉子漏電抗,xm表示勵磁電抗,s表示轉差率。
異步電動機的定子電流可以表示為


圖1 異步電動機等效電路
可以看出,定子電流與定子電壓向量成正比,即通過控制定子電壓,可以改變定子電流大小。
異步電動機的轉矩可以表示為
式中,m1為相數;Ωs為電源角頻率。
可見,轉矩與定子電壓的平方成正比,通過控制定子電壓可以改變轉矩T。
1.2 軟起動器主回路[2]
上述分析表明,異步電動機的定子電流和轉矩同時受到定子電壓控制,可以將交流調壓器用于異步電動機軟起動器。軟起動器結構如圖2所示,主回路由3組反并聯晶閘管(VT1~VT6)裝置構成,只要控制好每組晶閘管的觸發角,就可以控制每相交流電的導通范圍,從而改變定子電壓的有效值。

圖2 軟起動器主回路結構
2 皮帶機用軟起動器系統
2.1 系統原理
皮帶機軟起動器主要是取代直接起動方式,可以限制整個起動過程的電流,避免出現直接起動方式中的磁力起動器及上級配電開關跳閘,可減少磁力起動器燒毀、減速器、耦合器損壞等故障或事故。
根據皮帶機工作原理,速度是其被控量,而軟起動器中最終被控量是異步電動機的電壓,需要構建起這兩者的控制關系,同時要考慮到軟起動器的電流限制這個優點。據此可知,軟起動器的控制過程中出現對電壓、電流的控制要求,其控制策略可以借鑒直流電動機調速系統控制思想[3],但是需要考慮異步電動機特點,對其進行修改。
2.2 系統實現
在軟起動器中,三相交流調壓器需要3組共6個晶閘管裝置,其觸發脈沖的控制尤為重要。控制中,同相兩個晶閘管觸發脈沖相差180°,3組觸發脈沖對應脈沖相差120°。
系統采用轉速和電流2個PI調節器,考慮到皮帶軟起動器和交流調壓器的特點,轉速和電流調節器都是單向限幅,即最終控制異步電動機的定子電壓最低值為0,最大值為電網電壓。如果需要皮帶機反向運行,只需在控制主回路更換定子任意兩相接線,其余控制同上。
3 系統建模與仿真
建立皮帶軟起動器的模型如圖3所示。
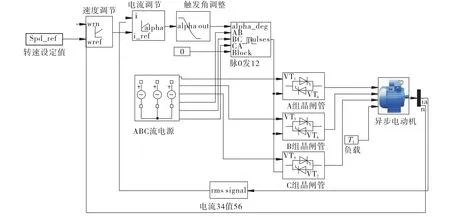
圖3 雙閉環皮帶軟起動器仿真模型
整個模型主要有速度調節器、電流調節器、觸發角調整、脈沖發生器,晶閘管調壓電流,異步電動機等模塊構成。設定觸發角調整模塊主要是因為觸發角度和交流調壓器輸出電壓成反向關系。系統必須設定轉速反饋和電流反饋,其中電流反饋是交流值,因為電流調節器是仿照直流電動機,需要計算單相電流的有效值,再作為反饋量。
仿真結果如圖4所示,其中圖4(a)為電機轉速波形,設定轉速為1 400 r/m,起動過程為0.5 s。圖4(b)為定子A相電流波形,整個軟起動器電流有效值限幅為60 A,從仿真波形來看,起動過程能達到限流目的。圖4(c)為AB線電壓波形,由于晶閘管在1個周期里存在切斷和導通,線電壓出現尖峰,存在諧波分量。仿真選用額定功率為2.2 kW的三相交流異步電動機。
4 系統設計
4.1 硬件設計
在高性能電機調速系統中,一般用DSP作為主控制器。本系統為晶閘管控制,對實時性的要求低于IGBT等全控型器件,考慮硬件成本,采用Intel 8xc196kc單片機[4]為主控處理器。

圖4 雙閉環控制皮帶機仿真波形
8 xc196kc單片機含有高速輸出口 HSO.0、HSO.2、HSO.2,可以作為脈沖發生器,通過軟件設定在需要的時間發出高或低電平,形成脈沖。
8 xc196kc單片機中高速輸入器HSI用于記錄某一外部事件發生的時間,其事件基準由內部定時器提供,共可記錄8種事件,有4根引腳可作高速輸入腳。皮帶軟起動器系統中其可作為同步脈沖的輸入。
系統反饋所需的電壓電流信號可以通過采樣電路來實現。8xc196kc內置的8通道高速A/D轉換器,可滿足應用需求,比其他類型的單片機使用方便。
4.2 軟件設計
主程序主要有初始化、系統診斷、設定最大觸發角、讀取轉速給定、PI調節器運算、脈沖同步運算、脈沖發生事件運算等部分。其中采樣、PI調節器運算、脈沖觸發時刻計算在中斷服務程序中完成。
為了知曉單片機工作是否正常,在系統投入工作之前需要系統檢測,主要包括檢測CPU、內存、接口等功能是否正常工作等。
PI調節器數字化實現算法較多,常見的有位置式PI算法和增量式PI算法,為了運算方便,減少誤差積累,采用增量式PI算法。
觸發脈沖生成通過高速輸出口 HSO實現。8xc196kc的高速輸出口可以以設定好的時間產生觸發信號。
HSI高速輸入中斷子程序用于檢測同步信號,可選用線電壓UAB作為同步信號,經同步變壓器降至左右,再經正弦波/方波變換電路變成方波信號,將此信號接至微機的高速輸入單元,令其在下降沿產生中斷。
5 結論
將直流雙閉環調速系統的控制思想引入到皮帶機軟起動器系統中,同時為符合皮帶運輸實際,限定電流和轉速調節器為單向調節,可以實現對速度給定的最優時間響應。借助仿真說明了系統的可行性,最后給出皮帶軟起動器的系統設計方法。
[1] 李朝東.智能化軟起動器在興縣亞軍選煤廠的應用[J].選煤技術,2010(4):55-58.
[2] 劉 利,王 棟,等.異步電動機軟起動器控制方式的研究[J].電氣應用2010,29(16):36-40.
[3] 陳伯時.電力拖動自動控制系統[M].3版.北京:機械工業出版社,2003.
[4] 孫 佐.基于8XC196單片機的EPA和PTS實現伺服電機控制[J].組合機床與自動化加工技術,2005(5):67-69.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
裝備制造技術(2020年9期)2021-01-26 00:15:12
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
同煤科技(2015年2期)2015-02-28 16:59:14
電子設計工程(2015年15期)2015-02-27 12:07:30
