光源編碼+PDR組合的室內行人定位方法
2019-06-05 07:51:52牛小驥
測繪通報 2019年5期
閆 偉,牛小驥,曠 儉
(武漢大學衛星導航定位技術研究中心,湖北 武漢 430079)
在室外環境中,全球衛星導航系統(global navigation satellite system,GNSS)能夠提供分米級甚至厘米級精度的定位;但在室內環境中,GNSS及相關技術無法提供高精度的定位服務[1]。針對室內高精度定位的需求,國內外研究機構主要利用視覺、藍牙天線陣列、超寬帶、音頻、光源[1-2]等方法實現定位。其中,隨著基礎照明設施的普及,光源定位技術在室內迅速發展[3]。
目前,光源定位技術主要包括基于LED燈信號特征提取的定位技術[4]、基于光強模型的定位技術[5]、基于紅外光視覺捕捉的定位技術[6]、基于特殊光源的定位技術[7]等。光源編碼定位是一種基于特殊光源的定位技術:光源基站進行編碼設計,使地面不同位置具有不同的光信號;接收端對光信號進行解碼后,準確計算自身位置,其定位精度可以達到分米級甚至厘米級[2-3]。但單獨利用光源編碼定位可能會遇到以下問題:①在非視距(non line of sight,NLOS)環境中,接收端被障礙物或行人部分遮擋,接收到的光強降低,噪聲增大,影響位置精度;②接收端將反射光信號誤判為直射光信號,造成定位粗差;③接收端因某些原因,若被完全遮擋,導致定位失敗。這些問題影響了光源編碼定位在室內場景中的發展。
近年來,微機電系統(micro-electro-mechanical system,MEMS)快速發展,智能手機都帶有MEMS傳感器[8]。基于智能手機的行人航跡推算(pedestrian dead reckoning,PDR)技術利用MEMS慣性測量單元(inertial measurement unit,IMU),獨立、連續地推算行人位置,短期精度高。但MEMS傳感器誤差較大,且導航算法中存在積分運算,故PDR的位置誤差會隨時間迅速累積[9]。
針對上述問題,本文基于智能手機平臺,運用擴展卡爾曼濾波(extended Kalman filter,EKF)將光源編碼位置與PDR位置相融合。光源編碼+PDR組合既能利用光源編碼定位結果實時修正IMU誤差參數,控制PDR結果的發散;又能在光源編碼定位無效時,利用PDR的短期結果提供較高精度的導航信息,從而保證定位結果的連續性和準確性。
光源編碼+PDR組合算法的完整框圖如圖1所示。
1 光源編碼定位系統
光源編碼定位系統由光源基站、接收端與相應軟件組成。系統的編碼體現在外殼的編碼設計:將半球形外殼沿經緯度方向均勻劃分成多塊,每一塊分別進行開孔、閉孔的設計。開孔表示編碼位1,即某部分外殼被去除,可使光線通過;閉孔表示編碼位0,即某部分外殼未被去除,阻止光線通過。外殼沿緯度方向進行不同的開孔、閉孔順序設計。
圖2為光源編碼定位原理示意圖。光源基站懸掛在天花板上,工作時內部電機帶動編碼外殼旋轉,LED光源通過開孔形成光束,使地面產生明暗變化。接收端記錄光強的時間序列測量值,根據光源基站坐標、外殼編碼參數和光信號解碼信息,判斷自身的粗略位置;之后通過小波變化降噪、優化的編碼策略等,精確測量自身位置,達到厘米級的定位精度。具體的光源編碼基站設計和定位算法參考文獻[3]。
2 基于捷聯慣導的PDR算法
基于捷聯慣導的PDR算法框架如圖1所示。利用IMU數據進行慣性導航系統(inertial navigation system,INS)機械編排,得到用戶實時的導航信息(三維位置、速度和姿態)。為了減緩捷聯慣導的誤差累計速度,算法實時檢測行人運動狀態:當檢測到行人向前邁出一個腳步時,利用行進的距離構造速度觀測值進行EKF速度更新[9]。
2.1 INS機械編排
已知物體上一時刻的導航信息,利用INS機械編排,對IMU數據進行積分,可以得到當前時刻的導航信息。由于智能手機IMU的傳感器誤差較大,積分后位置誤差會迅速增大,因此:①進行機械編排時可以忽略影響極小的誤差項(如地球自轉引入的誤差)而不影響算法精度[9];②需要引入其他觀測量,利用EKF進行數據融合以提高精度。
導航坐標系(n系)下INS機械編排方程的離散化形式[10]如下
(1)

2.2 EKF模型
EKF狀態方程、量測方程的離散化形式見式(2),狀態向量δxk、狀態轉移矩陣Φk/k-1見式(3)、式(4)[11]。
(2)
(3)
(4)
式中,δpn、δvn、φ分別為位置、速度、姿態的誤差。
根據EKF狀態方程和量測方程,利用式(5)進行狀態更新和量測更新,得到行人的導航信息[1]。
(5)
2.3 行走速度更新
本文針對行人運動特征,進行如下合理假設:多數時候行人面朝的方向就是行走的方向[12];短時間內行人的速度是一個常值[13]。即在一步周期內,只存在恒定的前向速度,側向和垂向的速度幾乎為0。基于該假設計算行走速度,行人坐標系(l系)下的速度觀測值[13]如下
(6)
式中,vl為l系下的速度真值;nvl為觀測噪聲;SL為步長;Δt為走一步的時間。
n系下速度真值vn與vl存在以下關系
(7)

(8)
(9)
利用EKF融合行走速度,將l系速度預測值與速度觀測值之差作為量測信息,量測方程如下
(10)
3 光源編碼+PDR組合算法
3.1 光源編碼位置更新
光源編碼定位系統可以提供二維位置信息,將PDR位置與光源編碼位置的差值作為量測信息,得到量測方程如式(11)—式(13)。
δzk,P-l=Hk,P-lδxk+vk
(11)
(12)
(13)

3.2 抗差處理
在實際應用中,光源編碼定位偶爾會出現遠超限定誤差的情況。光源編碼+PDR組合算法利用PDR推算結果短期精度高的特點,使用PDR位置預測結果探測光源編碼定位結果中的粗差,進行剔除或降權處理以起到抗差的目的[14]。
(14)
(15)
(16)
4 試驗與結果分析
4.1 算法參數與試驗設計
為了驗證光源編碼+PDR組合算法的有效性,本文進行了4組試驗。測試手機為華為P10 Plus,該手機IMU芯片型號為InvenSense公司的ICM-20690。光源編碼定位系統由中國科學院深圳先進技術研究院提供[3]。設置光源編碼定位頻率為1 Hz,即每1 s從光源編碼定位系統獲取一次位置與標志位(1表示位置數據有效,0表示無效);設置IMU采樣率為50 Hz。本文利用光源編碼+PDR組合反向平滑[10]的位置結果作為軌跡的參考真值。
試驗場地為武漢大學詩琳通地球空間信息技術協同創新中心,光源編碼基站布置在場地側上方,可以完整覆蓋試驗場地,圖3為基站實物圖。試驗路徑為5.4 m×5.4 m的矩形,基站、參考軌跡與行走方向如圖4所示,(0,0)為試驗起點。4組試驗分別沿預定軌跡行走5圈、3圈、3圈、3圈,測試人員端平手機向前行走。試驗軌跡包含了正對、側對、背對光源基站的軌跡,可以有效考察LOS與NLOS環境中光源編碼+PDR組合算法的有效性。
4.2 光源編碼定位結果分析
4組試驗光源編碼定位結果的標志位如圖5所示。每組試驗都存在標志位為0的數據,即在試驗過程中,由于行人本身的遮擋或其他原因,光源編碼定位系統會出現定位失敗的情況,特別是第3組試驗,有超過20個點定位失敗。
圖6給出了標志位為1的光源編碼定位結果。第2、3、4組試驗在背對光源基站的區域,都出現了定位誤差大于2 m的粗差點。但對于正常定位點,光源編碼定位的精度在1 dm以內,與參考軌跡基本完全符合。
表1統計了4組試驗的光源編碼定位結果。3組試驗的正常定位點占80%以上,但存在少數定位誤差大的點;第3組試驗有超過1/3的點標志位為0,正常定位結果僅占60%。
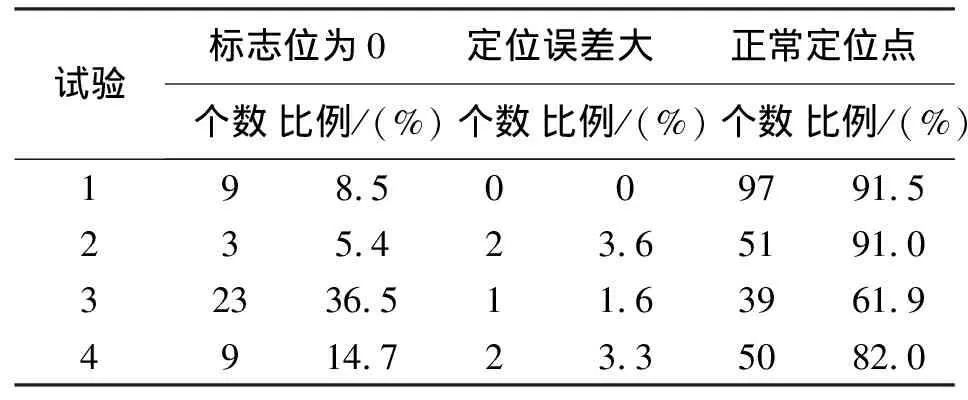
表1 光源編碼定位結果統計
經過以上分析,在實際應用中,單獨依靠光源編碼定位系統進行室內行人定位,將無法獲得穩定可靠的定位結果。
4.3 光源編碼+PDR組合定位結果分析
圖7為光源編碼+PDR組合的定位結果,組合結果與參考軌跡基本完全符合,可以反映出行人真實的導航信息。在光源編碼定位結果良好時,光源編碼+PDR組合的定位精度與光源編碼定位精度相近,且定位結果連續穩定;當光源編碼定位出現粗差點時,如第2、3、4組試驗,光源編碼+PDR組合的定位結果仍然良好,未出現異常結果;當光源編碼正常定位點明顯減少、定位結果不連續性時,如圖6中參考軌跡西南角的光源編碼定位點比較稀疏,光源編碼+PDR組合可以提供連續的導航信息,保證系統的可靠性。
表2給出了光源編碼+PDR組合定位的誤差統計。光源編碼+PDR組合定位的水平誤差均方根值在1 dm以內,均值在8 cm以內,最大值在3 dm左右。EKF在沒有外部信息輔助的情況下,解算結果必然是逐漸發散的;結合圖5(c),即便光源編碼定位系統在5 s內沒有提供可用的位置結果,光源編碼+PDR組合算法也僅僅產生了3 dm左右的誤差,這也進一步體現了本文算法的有效性。
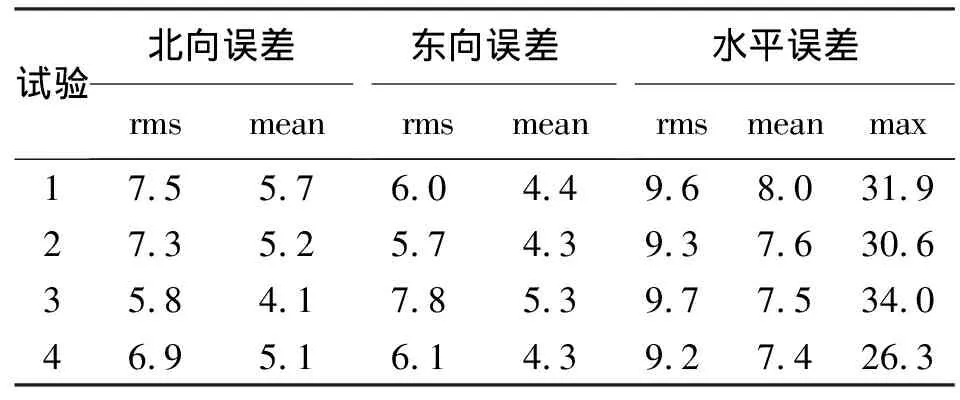
表2 光源編碼+PDR組合定位誤差統計 cm
經過以上分析,在理想情況下,光源編碼+PDR組合和光源編碼定位都能達到分米級乃至厘米級的定位精度,定位結果連續可靠,能反映行人真實的位置情況;當光源編碼定位系統定位不連續或定位性能下降時,單獨依靠光源編碼定位不能很好地滿足實際需要,但光源編碼+PDR組合仍能保持1 dm的定位精度,提供連續的導航信息。整體而言,光源編碼+PDR組合更適合高精度的室內行人定位。
5 結 語
本文針對光源編碼定位不連續、易受遮擋導致定位性能下降等問題,以基于捷聯慣導的PDR算法為基礎,實現了基于EKF的光源編碼+PDR組合算法,并運用新息濾波進行抗差處理。試驗結果表明,光源編碼+PDR組合在室內環境中能實現高精度的連續定位,具有更高的穩定性和可靠性,適用于高精度室內行人定位。
