一種具有跳躍能力的自平衡兩輪機器人動力學建模與越障控制
2013-05-08 23:32:10孫漢旭張延恒賈慶軒
機電產品開發與創新 2013年6期
肖 寒,孫漢旭,張延恒,賈慶軒
(北京郵電大學 自動化學院,北京100876)
0 引言
移動機器人作為機器人的一種重要類型,因其相對于固定機器人在功能和應用范圍上具有明顯優勢[1~4],為了擴大星際漫游車的活動范圍,NASA曾推出了一系列彈跳機器人[5~8]。美國明尼蘇達大學推出一種彈跳機器人UNM Scout[9],可實現跳躍、滾動、停止等動作,哈爾濱工業大學的韓慶虎等人曾研制出一款小型兩輪彈跳機器人[10],當其運動時彈跳機構以輔助輪形式拖于地面,需要越障時彈跳機構撞擊地面,使兩輪機器人越障,取得了不錯的越障效果。
自平衡兩輪機器人較普通移動機器人具有轉彎靈活、無剎車系統及體積小巧[11]等特點,而具備跳躍能力后將會解決其越障能力不足的缺陷。本文針對所研制出的一種具有跳躍能力的自平衡兩輪車。本文針對該兩輪機器人,建立了其在彈跳準備階段的動力學模型,并給出了一種模糊滑模控制器實現其自平衡與越障的控制。分析了兩輪機器人的最大可控角、起跳條件以及越障條件。規劃出機器人在騰空階段的彈跳軌跡,并給出了落地恢復方案。最后將所設計彈跳控制方案用于兩輪機器人彈跳控制中,實驗研究驗證了所用控制方案的有效性。
1 跳躍準備階段動力學建模
1.1 機器人越障流程
具有跳躍能力的自平衡兩輪機器人見圖1,其彈跳越障流程:①根據障礙物外形尺寸規劃出機器人跳躍越障的最佳軌跡,確定機器人的起跳速度和角度;②根據確定的起跳角度和速度計算出機器人起跳瞬間所需的水平移動速度和豎直彈跳速度;③設計模糊滑模控制器控制其水平移動速度與彈跳腿角度;④根據所確定的機器人起跳瞬間豎直方向速度控制彈簧的壓縮量,實現對豎直速度的控制。

圖1 機器人參數定義Fig.1 Robot parameter definition
1.2 動力學建模
由于機器人的彈跳運動過程轉向運動會增加系統的不穩定性,而機器人又具有零半徑轉彎功能,因此在彈跳準備階段的控制為直線運動控制。機器人的參數定義如圖1所示。機器人在地面的直線運動具有兩個自由度,分別為車輪滾動角θ,彈跳腿擺角φ,系統輸入為長軸電機作用于輪上輸入轉矩。兩輪機器人在運動任意位置處動能計算如下:
其中,mt—彈跳腿上重塊質量;mb—機器人底盤質量;mw—機器人兩個車輪的質量;r—車輪半徑;l—彈跳腿上重塊質心到車輪軸線的距離;Jw,Jb,Jt分別為車輪,底盤,上重塊相對于車輪軸線的轉動慣量。將式 (1)代入拉格朗日方程化簡得到:

1 .3最大可控角分析
針對所設計機器人,分兩種情況分析其最大可控角的影響因素。當機器人處在臨界驅動擺角時,電機輸入力矩達到最大輸入時有:

式中:Mw—此時電機輸入力矩,計算可得:

式(4)為此種情況下計算出的最大驅動擺角。而當機器人處在臨界驅動擺角時,地面摩擦力為最大滑動摩擦力時有:

式(5)為此種情況下計算出的最大驅動擺角,其中M為機器人整體質量。則機器人的最大可控角為:

由上式看出,可以通過提高電機驅動力矩,增大車輪與地面的摩擦系數,減小偏心質量占機器人總質量比重的辦法來增大機器人的最大可控角。
2 跳躍準備階段模糊滑模控制器設計
將式(2)化為如下的非線性狀態空間形式(化簡過程略):

其中,Df1,Df2為未知參數攝動與環境擾動。


其中:λ2—滑模面S2的系數,也即總滑模面的斜率,通過調整λ2的大小,可以改變總滑模面中兩級分滑模面的權重,從而實現了控制優先級的調整。
由于固定不變的λ1,λ2,僅適用于初始條件不變的情況,同時,環境的變化也會造成控制效果的不理想,因此,本文采用模糊在線調整的辦法,實現對λ1,λ2的最優配置。將λ1,λ2分別取值如下:

其中,λ1',λ2'—針對系統控制目標,通過遺傳算法優化參數所得到的初始值;△λ1,△λ2—模糊控制器輸出調整值。
對λ1在線調整構造模糊控制器,輸入為彈跳腿擺角φ,輸出為△λ1,通過對機器人實物參數的計算可知機器人最大可控角,設為a rad,則取輸入論域為(-a,a),輸出論域為(-0.3,0.3),隸屬度函數取為三角型,模糊控制規則為一一對應。
對λ2在線調整構造模糊控制器,輸入為滑模面S1,輸出為△λ2,通過對機器人越障參數的計算可知,設定的水平速度為b rad/s,則取輸入論域為(0,b),輸出論域為(0,0.3),隸屬度函數取為三角型,模糊控制規則為一一對應。
所設計模糊滑模控制器最終輸出為電機的輸入力矩U,此模糊控制器的輸入為系統總滑模面函數S及其導數S˙,在此,對傳統模糊控制器做一定改進,使其輸入輸出論域范圍可以隨當前輸入誤差做相應調整,以提高模糊控制器的控制精度,我們取滑模面S的輸入論域為[-c,c],S˙輸入論域為[-d,d],輸出力矩 U 的論域為[-c,c],其中 c=1/|2S|,d=1/|2S˙|,相應的隸屬度函數取三角型, 模糊控制規則如表1所示。從表中模糊規則的設計可以看出,當S與S˙的取值同號時,模糊規則的控制輸出為使S S˙取值減小趨于0,當S與S˙的取值異號時,模糊規則的控制為0,因此SS˙<0時系統趨于穩定,且狀態量誤差趨于0,由此可見此模糊規則的設計可以滿足滑模控制穩定性要求。

表1 模糊規則表
3 起跳階段動力學分析
通過控制機器人水平方向與豎直方向運動速度的方法來實現對機器人彈跳角度與速度的控制,彈跳腿維持豎直狀態保證系統穩定。機器人在起跳階段,系統能量守恒:

式中:vty—彈簧恢復原長時彈跳腿以上部分豎直方向的速度;ht—此時上部質心豎直方向上升高度;x—彈簧初始壓縮量;k—彈簧勁度系數,由上式可以得出機器人的離地條件為vty>0,計算可得機器人的離地條件為:

彈簧在恢復到原長時,機器人整體鎖定,上下部分以相同的速度向上運動,此時由動量守恒有:

v0即為起跳瞬間,機器人的豎直速度,而水平速度為在準備階段機器人移動速度vx=θ˙r。
4 運動學分析及軌跡規劃
要確定機器人在空中的運動軌跡,首先需要根據障礙物外形確定空中運動軌跡的最高點,設機器人在空中運動軌跡拋物線的最高點坐標為(xm,ym),可以解得:

根據機器人所選電機可以確定其最大運動速度為3m/s,由式(14)可以計算出機器人在騰空階段質心最高點的集合為一實心拋物線。當機器人水平方向速度為最大值,在不同的彈簧壓縮量下,機器人質心最高點的軌跡集合為上述實心拋物線的最外層拋物線,而當水平速度不為最大時,則拋物線內的任何一點都可能是跳躍軌跡的最高點。
根據障礙物的類型不同,可以分為溝渠、豎直障礙物以及平臺類型障礙物三種,但越障條件均為機器人最低點軌跡高于障礙物。以越過豎直類型障礙物為例,做出如圖2所示越障軌跡規劃。其中兩實心拋物線的相交區域為機器人質心可越障的最高點集合,區域越大,可供選擇的越障軌跡方案也就越多,不相交則不可越障。越障軌跡最高點橫坐標取0,然后根據起跳點與落地點關于障礙中線對稱且保證軌跡與障礙物相離的原則,三點確定出其越障軌跡的拋物線方程。

圖2 越障軌跡規劃Fig.2 Obstacle navigation trajectory planning
其中起跳點與落地點的選擇根據實驗所用障礙物所確定的越障軌跡的坐標,實驗所選障礙為豎直障礙,高度為15cm,越障軌跡取為距離障礙物最外側5cm的距離,則由起跳點與最高點坐標可得機器人越障軌跡:

其中最高點坐標為(x0,y0),起跳點坐標為(w,0), w=2r+d/2,d—障礙物寬度。而機器人在水平與豎直方向的運動規律為:


化簡可得運動方程為:
由上式的對應項系數相等可以得到:

至此,分析得到了機器人在準備階段與起跳階段的兩個控制目標值,水平速度vx與豎直速度v0。
5 實驗
兩輪機器人實物的物理參數為mt=1.2kg,mb=0.45kg,mw=0.2kg,r=0.08m,l=0.05m,Jw=0.00064kg·m2,Jb=0.000141kg·m2,Jt=0.003kg·m2, a=0.64rad, b=3rad/s。
實驗所用豎直障礙物高度為15cm,設定彈跳高度為20cm,根據前述軌跡規劃方法可得規劃軌跡方程為:

兩輪機器人越障實驗過程如圖3所示。其實物物理參數與動力學建模參數相同。越障實驗機器人水平滾動角速度實驗曲線如圖4所示,擺角角度曲線如圖5所示,從圖中可以看出兩輪機器人水平速度可以在較短的時間內收斂到期望值,穩態誤差極小,擺角及擺角速度也在很短的時間內收斂到0,震蕩很小,電機輸入力矩無抖振,力矩值在電機最大力矩范圍之內,越障運動軌跡符合預期。機器人水平速度、擺角等控制量均可以在較短時間內收斂到期望值,控制效果達到預期,驗證了所用控制方法的有效性。

圖3 機器人越障實驗Fig.3 The robot obstacle navigation experiment
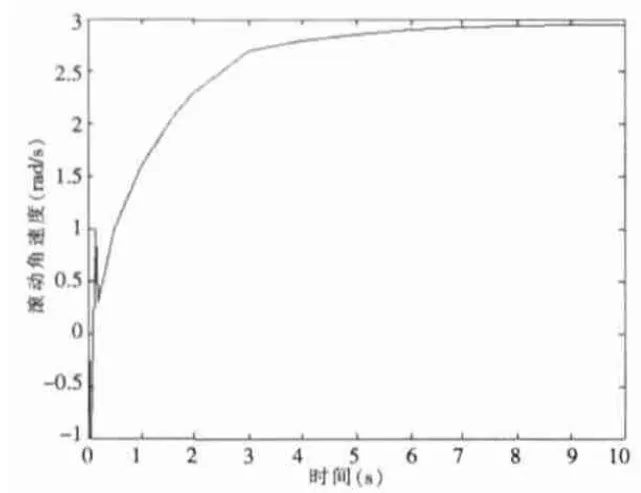
圖4 兩輪機器人滾動角速度實驗曲線Fig.4 Robot rolling angular velocity curves

圖5 機器人擺角角度實驗曲線Fig.5 Robot swinging angle curve
6 結論
本文針對一種具有跳躍能力的兩輪機器人的越障控制問題,建立了其動力學模型;利用模糊滑模控制做了機器人彈跳準備階段的控制;根據障礙物的外形,做了越障軌跡規劃,計算得到機器人準備階段與起跳階段的控制目標。通過實驗驗證了所用控制方法具有較好的控制效果,實現了兩輪機器人的跳躍越障。
[1]M.H.Kaplan,H.Seifert.Hopping transporters for lunar exploration.Journal of Spacecraft and Rockets.1969,3.
[2]劉壯志,席文明,等.彈跳式機器人研究[J].機器人,2003,6.
[3]劉壯志,朱劍英,吳洪濤.間歇性單足彈跳機器人落地穩定性分析[J].機械科學與技術,2004,9.
[4]劉壯志.彈跳機器人若干關鍵技術研究[D].南京航空航天大學, 2000,1~5.
[5]Paolo Fiorini,Samad Hayati,Matt Heverly,et al.A Hopping Robot for Planetary Exploration[J].In Proc.of IEEE Aerospace Conf.,March 1999.
[6]E.Hale,N.Schara,J.Burdick,et al.A minimally actuated hopping rover for exploration of celestial bodies[J].In ICRA’2000.
[7]Paolo Fiorini,Joel Burdick.The Development of Hopping Capabilities for Small Robots[J].Auto-nomous Robots,14,2003.
[8]Mirko Confente,Claudio Cosma,Paolo Fiorini,et al.Planetary Exploration Using Hopping Robots[A].7th ESA Workshop on Advanced Space Technologies for Robotics and Automation'ASTRA2002'ESTEC,Noordwijk,the Netherlands,November 19~21,2002.
[9]J.L.Pearce,P.E.Rybski,S.A.Stoeter,N.Papani-kolopoulos.Dispersionbehaviorsforateamofmultipleminiaturerobots.IEEEConferenceonRoboticsandAutomation,Taipei,Taiwan,September,2003.
[10]韓慶虎.小型兩輪彈跳機器人的研究[D].哈爾濱工業大學,2007.
