基于虛擬現(xiàn)實(shí)技術(shù)的三自由度上肢康復(fù)機(jī)器人系統(tǒng)
2013-05-08 23:32:12秦江偉賈晉杰李成求
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新 2013年6期
關(guān)鍵詞:康復(fù)
秦江偉,賈晉杰,李成求
(大連海事大學(xué) 裝備學(xué)院,遼寧 大連 116026)
0 引言
目前,腦中風(fēng)在我國對中老年人群的健康和生命安全造成的危害十分嚴(yán)重。傳統(tǒng)的康復(fù)治療主要局限于治療醫(yī)師對患者一對一的物理治療,雖然治療醫(yī)師的經(jīng)驗(yàn)?zāi)軌蚝芎玫貛椭颊叩目祻?fù),但是這種方法康復(fù)周期長、耗費(fèi)人力且不能合理保證康復(fù)訓(xùn)練的強(qiáng)度,同時(shí)康復(fù)治療過程過于單調(diào)、枯燥,患者很難產(chǎn)生興趣,難以保證康復(fù)治療達(dá)到理想的效果。機(jī)器人技術(shù)和虛擬現(xiàn)實(shí)(Virtual Reality,VR)技術(shù)引入康復(fù)領(lǐng)域能夠有效解決上述缺陷,為患者建立合理的康復(fù)治療系統(tǒng),提高康復(fù)訓(xùn)練的科學(xué)性[1]。
基于虛擬現(xiàn)實(shí)技術(shù)的康復(fù)機(jī)器人得到了各國研究者的普遍重視,并取得了一定的進(jìn)展,如日本大阪大學(xué)Junji Furusho等設(shè)計(jì)的6自由度上肢康復(fù)裝置[2]、美國麻省理工學(xué)院的MIT-MANUS機(jī)器人[3]、蘇黎世大學(xué)Tobias Nef等人研制的ARMin機(jī)器人[4,5]等。
目前,不少科研工作者研制基于外骨骼式的上肢康復(fù)機(jī)器人,外骨骼式康復(fù)機(jī)器人關(guān)節(jié)與人體關(guān)節(jié)一致,但是由于其穿戴在肢體上會(huì)造成患者心理上的束縛性和不安全感,不利于患者的康復(fù),而作者研制的機(jī)器人具有更大的活動(dòng)空間,增加了可操作性,同時(shí)該設(shè)計(jì)能夠?qū)崿F(xiàn)左右臂的交互康復(fù)訓(xùn)練,與外骨骼式的單臂訓(xùn)練方式相比,既經(jīng)濟(jì)又實(shí)用。
1 系統(tǒng)結(jié)構(gòu)
上肢康復(fù)機(jī)器人的整體實(shí)現(xiàn)系統(tǒng)如圖1所示,該系統(tǒng)實(shí)現(xiàn)以患者為主動(dòng)的訓(xùn)練模式(后期會(huì)增加伺服電機(jī),實(shí)現(xiàn)主被動(dòng)結(jié)合的訓(xùn)練模式),患者操作機(jī)器人末端手柄實(shí)現(xiàn)計(jì)算機(jī)屏幕上的游戲,3個(gè)絕對式編碼器檢測機(jī)器人各軸旋轉(zhuǎn)方向和位置,數(shù)字信號處理器(DSP)和解碼電路會(huì)處理絕對式編碼器的正交脈沖信號,DSP處理信號后與計(jì)算機(jī)進(jìn)行串行通信控制虛擬環(huán)境中的對象模型,當(dāng)對象模型運(yùn)動(dòng)受限后計(jì)算機(jī)會(huì)通知DSP控制磁粉制動(dòng)器使軸制動(dòng)或受到負(fù)載,使患者受到力的反饋。

圖1 整體系統(tǒng)結(jié)構(gòu)圖
2 機(jī)器人結(jié)構(gòu)設(shè)計(jì)
考慮到機(jī)器人結(jié)構(gòu)設(shè)計(jì)的復(fù)雜性和成本問題,而且肩部的屈/伸、肩部的外擺/內(nèi)收和肘部的屈/伸是人體上肢運(yùn)動(dòng)最基本的3個(gè)自由度,作者設(shè)計(jì)了能夠?qū)崿F(xiàn)該3個(gè)自由度在空間一定范圍運(yùn)動(dòng)的機(jī)器人,整體結(jié)構(gòu)如圖2所示,其主要包括:支撐和固定系統(tǒng)的基座,患者做康復(fù)訓(xùn)練實(shí)現(xiàn)各自由度運(yùn)動(dòng)的連桿機(jī)構(gòu)和3重軸,固定在基座上的控制結(jié)構(gòu)。

圖2 機(jī)器人整體結(jié)構(gòu)
圖3是該康復(fù)機(jī)器人運(yùn)動(dòng)原理圖,從上向下依次能夠?qū)崿F(xiàn)肩部外展內(nèi)收運(yùn)動(dòng),肘部的屈伸運(yùn)動(dòng),肩部的屈伸運(yùn)動(dòng)。

圖3 機(jī)器人運(yùn)動(dòng)原理圖
2.1 連桿結(jié)構(gòu)
連桿結(jié)構(gòu)共由六根連桿構(gòu)成,彼此通過連桿軸結(jié)合在一起,在連桿軸兩端配有軸承,使其能夠自由轉(zhuǎn)動(dòng),同時(shí)由于本系統(tǒng)的設(shè)計(jì)在豎直方向上運(yùn)動(dòng)范圍有限制,設(shè)計(jì)時(shí)采用了扇形齒輪,通過該齒輪和圓柱齒條的配合,能夠有效地保障系統(tǒng)在上下運(yùn)動(dòng)時(shí)的高度,如圖4所示,其中黑色箭頭為連桿結(jié)構(gòu)空間運(yùn)動(dòng)坐標(biāo)系,綠色箭頭為患者進(jìn)行康復(fù)訓(xùn)練時(shí)的運(yùn)動(dòng)方向(左右運(yùn)動(dòng)實(shí)現(xiàn)肩部的外展/內(nèi)收,上下運(yùn)動(dòng)實(shí)現(xiàn)肩部的屈/伸,前后運(yùn)動(dòng)實(shí)現(xiàn)肘部的屈/伸)。
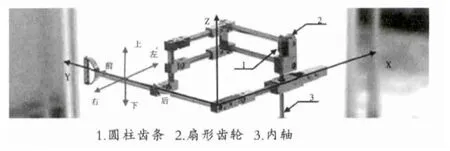
圖4 連桿結(jié)構(gòu)
2.2 傳動(dòng)結(jié)構(gòu)
在傳動(dòng)結(jié)構(gòu)中,采用絕對式編碼器和磁粉制動(dòng)器控制連桿結(jié)構(gòu)的空間運(yùn)動(dòng)。絕對式編碼器每個(gè)格雷碼唯一對應(yīng)一個(gè)絕對位置,在遇到停電、干擾等問題時(shí)不會(huì)受到影響,能夠得到準(zhǔn)確的位置信號。磁粉制動(dòng)器利用磁粉間的作用力代替摩擦片間的作用力來傳遞制動(dòng)力,具有結(jié)合平穩(wěn)、響應(yīng)快、無結(jié)合沖擊等特點(diǎn),保證了患者在主動(dòng)運(yùn)動(dòng)過程中的安全性和可靠性。
在設(shè)計(jì)時(shí)為了實(shí)現(xiàn)空間的自由運(yùn)動(dòng),采用了三重軸,彼此通過軸承相連,使其在運(yùn)動(dòng)時(shí)互不干涉。通過增加相應(yīng)的平衡塊,保證整個(gè)連桿結(jié)構(gòu)在平面內(nèi)的有效運(yùn)動(dòng),如圖5所示。

圖5 傳動(dòng)結(jié)構(gòu)
3 機(jī)器人控制系統(tǒng)
系統(tǒng)控制單元采用DSP芯片TMS320LF2407A,我們知道3個(gè)絕對式光電編碼器輸出正交編碼脈沖,而DSP2407A具有兩個(gè)QEP正交編碼模塊,能夠很方便地測出兩個(gè)軸的位置、方向信號,為了解決DSP與第3個(gè)編碼器的接口問題,利用HP公司的HCTL2016解碼芯片組成解碼電路與DSP的數(shù)據(jù)總線接口相連。其次,利用DSP的PWM脈沖信號驅(qū)動(dòng)磁粉制動(dòng)器,但由于信號太弱,采用IR2110組成驅(qū)動(dòng)放大電路。
DSP與計(jì)算機(jī)之間的通信采用異步串行通信。由于TMS320LF2407A的串行通信接口SCI引腳信號電平為TTL電平,而PC機(jī)串口的異步串行通信基于RS-232標(biāo)準(zhǔn),二者互不兼容,因此在兩者之間采用基于RS-232標(biāo)準(zhǔn)的驅(qū)動(dòng)芯片MAX232,同時(shí)因?yàn)門MS320LF2407A采用+3.3V供電,而MAX232采用+5.5V供電,所以在兩者之間采用TI公司提供的典型電平匹配電路,具體的控制流程如圖6所示。

圖6 控制系統(tǒng)結(jié)構(gòu)圖
4 虛擬現(xiàn)實(shí)系統(tǒng)
相關(guān)研究表面,與被動(dòng)運(yùn)動(dòng)相比,主動(dòng)運(yùn)動(dòng)更有利于促進(jìn)癱瘓肢體的康復(fù)[6]。虛擬現(xiàn)實(shí)技術(shù)[7]是融合了計(jì)算機(jī)仿真、圖形顯示技術(shù)和傳感器技術(shù)等的一種高新技術(shù),通過它能夠建立多感官刺激的虛擬環(huán)境,在該環(huán)境下進(jìn)行人機(jī)交互是提高患者主動(dòng)性的一種很好的方法。

圖7 游戲界面
在VC++6.0環(huán)境下,采用OpenGL(開放型圖形庫)構(gòu)建了虛擬現(xiàn)實(shí)環(huán)境。針對3自由度的上肢康復(fù)機(jī)器人,作者設(shè)計(jì)了一款控制小球運(yùn)動(dòng)的游戲,如圖7所示。
具體實(shí)現(xiàn)方法:灰色小球代表了機(jī)器人末端手柄,當(dāng)患者操作手柄做運(yùn)動(dòng)時(shí),小球也做同樣的運(yùn)動(dòng)。訓(xùn)練時(shí)既可以控制小球在地面運(yùn)動(dòng)也可以將小球從地面拿起并依次放到不同木柱的頂部。在該環(huán)境下,當(dāng)控制小球在地面上運(yùn)動(dòng)時(shí),如果碰到木柱或四周墻壁就會(huì)停止,患者會(huì)受到力的作用而必須控制手柄改變小球運(yùn)動(dòng)方向。小球具有一定的重量,當(dāng)拿起小球時(shí),握住機(jī)器人末端手柄的手會(huì)受到力的反饋,當(dāng)把小球放到木柱頂端時(shí),反饋力消失。
在虛擬環(huán)境中,小球由OpenGL繪球函數(shù)glutSolid-Sphere()獲得,通過glTranslatef()函數(shù)參數(shù)的變化來不斷移動(dòng)小球的位置。墻壁、地面和木柱由繪制四邊形法glBegin(GL_QUADS)獲得。關(guān)于小球與長方體碰撞后停止需要用到OpenGL中的實(shí)時(shí)碰撞檢測技術(shù),同時(shí)還應(yīng)用了紋理貼圖技術(shù),將圖片(.bmp格式)貼于各圖形表面,增加了環(huán)境的真實(shí)感。
5 結(jié)論
基于虛擬現(xiàn)實(shí)技術(shù)的3自由度上肢康復(fù)機(jī)器人能夠很好的彌補(bǔ)傳統(tǒng)康復(fù)治療的不足,尤其是提高患者的主動(dòng)性方面,是一種有效、科學(xué)的治療系統(tǒng),是工程技術(shù)和康復(fù)領(lǐng)域結(jié)合的一個(gè)全新的研究和應(yīng)用方向,同時(shí)該系統(tǒng)功能能夠不斷的進(jìn)行擴(kuò)展,如利用互聯(lián)網(wǎng)技術(shù)實(shí)現(xiàn)遠(yuǎn)程康復(fù)等,對腦中風(fēng)偏癱患者的康復(fù)具有積極的影響。
[1]胡宇川,季林紅.從醫(yī)學(xué)角度探討偏癱上肢康復(fù)訓(xùn)練機(jī)器人的設(shè)計(jì)[J].中國臨床康復(fù),2004,34.
[2]Furusho Junji,Li Chengqiu,Yamaguchi Yuhei.A 6-DOF Rehabilitation Machine for Upper Limbs including Wrists Using ER Actuators[Z].Proceedings of the IEEE InternationalConferenceon Mechatronics and Automation.Niagara Canada,July 2005.
[3]Krebs HI,Volpe BT,Aisen ML.Increasing productivity and quality of care:Robot-aided neurorehabilitation[J].Journal of Rehabilitation Research and Development,2000,6.
[4]NefT,RienerR.ARMin-design anovel armrehabilitation robot[Z].Proceedingofthe9thIEEEConferenceonRehabilitationRobotics.2005.
[5]Nef T,Mihelj Matjaz,Riener Robert.ARMin:a robot for patientcooperative arm therapy[J].MEDICAL&BIOLOGICAL ENGINEERING&COMPUTING(2007)45.
[6]馬維艷.運(yùn)動(dòng)意念對腦卒中患者康復(fù)的作用[J].中國臨床康復(fù),2002,7.
[7]李會(huì)軍,宋愛國.上肢康復(fù)訓(xùn)練機(jī)器人虛擬建模技術(shù)[J].中國組織工程研究與臨床康復(fù),2007,44.
猜你喜歡
康復(fù)(2023年11期)2023-11-20 07:45:54
康復(fù)(2023年14期)2023-11-20 06:04:54
中老年保健(2021年4期)2021-08-22 07:08:14
護(hù)理與康復(fù)(2021年2期)2021-03-05 08:10:44
家庭醫(yī)學(xué)(下半月)(2020年1期)2020-05-11 02:05:46
廣東醫(yī)科大學(xué)學(xué)報(bào)(2020年6期)2020-02-06 06:00:56
特別健康(2018年2期)2018-06-29 06:13:44
反射療法與康復(fù)醫(yī)學(xué)(2017年7期)2017-01-16 01:11:02
中國衛(wèi)生(2014年6期)2014-11-10 02:30:50
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年23期)2014-03-01 04:33:45
