基于四元數(shù)的6R串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)逆解應(yīng)用
2013-06-01 12:39:08陳愛,馮桑,何春,陸曉
機(jī)電工程技術(shù) 2013年9期
陳 愛,馮 桑,何 春,陸 曉
(廣東工業(yè)大學(xué),廣東廣州 510006)
0 前言
空間6R機(jī)械手的運(yùn)動(dòng)學(xué)逆解是空間機(jī)構(gòu)學(xué)中最難的問題之一,曾被Freudenstein喻為機(jī)構(gòu)運(yùn)動(dòng)學(xué)中的“珠穆朗瑪峰”[1]。傳統(tǒng)的逆運(yùn)動(dòng)學(xué)求解方法具有一定的局限性,比如D-H 法的矩陣運(yùn)算中,需要對(duì)進(jìn)行大量的“0”元素以及矩陣求逆運(yùn)算,計(jì)算冗余繁雜;文獻(xiàn)[2]利用特定機(jī)器人幾何構(gòu)型特點(diǎn)求得機(jī)器人運(yùn)動(dòng)學(xué)逆解的解析式,但其運(yùn)算過程需要大量人工參與,不具通用性,求解困難,而且涉及多解和奇異性等問題,不易實(shí)現(xiàn)實(shí)時(shí)在線控制[2]。
四元數(shù)法是基于旋量理論(Screw Theory)的一種算法,可以在一個(gè)全局坐標(biāo)系下建立各個(gè)剛體位置以及剛體運(yùn)動(dòng)的描述[2]。四元數(shù)法的物理意義在于其可以表征剛體變換時(shí)瞬時(shí)歐拉軸和所需的轉(zhuǎn)角。四元數(shù)法與歐拉方程相比,具有計(jì)算量小、精度高[2],且不會(huì)出現(xiàn)奇異現(xiàn)象等特點(diǎn)[2-3]。
1 四元數(shù)(quaternion)及普呂克坐標(biāo)系(Plücker coordinate)
1.1 四元數(shù)
四元數(shù)由一個(gè)實(shí)數(shù)單位和三個(gè)虛數(shù)單位組成,可以看作是拓展后的復(fù)數(shù),通常寫成

式(1)中,q0,q1,q2,q3均為實(shí)數(shù),i,j,k 服從以下運(yùn)算規(guī)律:

單位四元數(shù)(unit quaternion)是模為1 的四元數(shù),可以將其寫成:

(1)單位四元數(shù)的共軛

其中:*為四元數(shù)乘法。
(2)單位對(duì)偶四元數(shù)

其共軛

1.2 普呂克坐標(biāo)系
三維空間直線在普呂克坐標(biāo)系下描述為:

其中:d 為直線的單位方向向量;m=p×d ,p 為直線上任意一點(diǎn)的坐標(biāo)向量。
采用普呂克坐標(biāo)系表示直線后,直線由其方向向量d 和直線上任意一點(diǎn)p 構(gòu)成,并且直線方程與該直線上的點(diǎn)的具體位置無關(guān)。因此在普呂克坐標(biāo)系下表示直線,有利于簡化6R機(jī)器人各連桿的結(jié)構(gòu)。
那么兩直線的交點(diǎn)P 可以用以下方程求得

1.3 普呂克坐標(biāo)系下剛體運(yùn)動(dòng)的描述
對(duì)于給定型號(hào)的機(jī)器人,其初始位置時(shí)各軸心線的方向矢量均為已知。軸心線線上的點(diǎn)可以通過幾何關(guān)系獲得。普呂克坐標(biāo)系下的直線Lpi可以看作是一個(gè)特殊的對(duì)偶四元數(shù),其旋轉(zhuǎn)部分和向量部分的是不均為零的純旋轉(zhuǎn)為了滿足四元數(shù)運(yùn)算,將普呂克坐標(biāo)下的直線擴(kuò)展為8 維表示,即6R工業(yè)機(jī)器人各關(guān)節(jié)軸線:

i=1~6,為6R機(jī)器人第i 個(gè)旋轉(zhuǎn)軸。



2 單位四元數(shù)在6R 串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)正解中的應(yīng)用
本文采用對(duì)偶四元數(shù)法,利用6R 串聯(lián)機(jī)器人的末端三軸交于一點(diǎn)的幾何特點(diǎn),以及四元數(shù)的物理意義,容易求得6R 串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)正解。
2.1 末端位置求解
由于6R機(jī)器人末端三軸心線交于一點(diǎn)(稱為腕關(guān)節(jié)點(diǎn),wrist)才能有封閉解(如圖1)。為了簡化計(jì)算,筆者求第4、5軸的交點(diǎn)。因此,腕關(guān)節(jié)點(diǎn)坐標(biāo)Pw為:


圖1 6R串聯(lián)機(jī)器人結(jié)構(gòu)示意圖


2.2 末端姿態(tài)求解
6R 機(jī)器人的末端姿態(tài)通常用歐拉角表示,機(jī)器人工具坐標(biāo)系在各關(guān)節(jié)旋轉(zhuǎn)后與旋轉(zhuǎn)前變換過程中所產(chǎn)生的x、y和z軸的旋轉(zhuǎn)變換。
根據(jù)幾何變換關(guān)系可得:

設(shè)坐標(biāo)系通過繞z,y,x 軸旋轉(zhuǎn)角度γ,β,α 到坐標(biāo)系,其對(duì)應(yīng)的四元數(shù)為qz,qy,qx,則[8]:
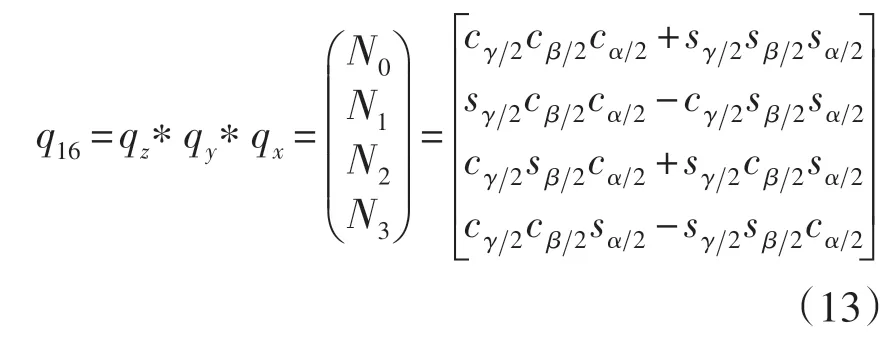
其中qx,qy,qz分別表示繞x,y,z 旋轉(zhuǎn)的四元數(shù)。
反之同理可以得到用四元數(shù)N0,N1,N2,N3來表示歐拉角,則可以得到:
6R 機(jī)器人運(yùn)動(dòng)學(xué)正解由末端的位置和姿態(tài)構(gòu)成,由上述公式可以求得機(jī)器人運(yùn)動(dòng)學(xué)正解。
3 6R 串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)逆解(Inverse Kinematic)
6R 串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)逆解的求解是一個(gè)難題。與運(yùn)動(dòng)學(xué)正解相反,運(yùn)動(dòng)學(xué)逆解是根據(jù)機(jī)器人末端姿態(tài)求解機(jī)器人關(guān)節(jié)角的問題。TSAI 等[1]利用高維逼近分析逆運(yùn)動(dòng)學(xué),推出了不同結(jié)構(gòu)的各種6R 機(jī)器人最多只有16 解的結(jié)論。然而一般6R 串聯(lián)機(jī)器人的逆解解析的表達(dá)式往往很復(fù)雜,這給快速精確計(jì)算運(yùn)動(dòng)學(xué)逆解帶來了困難。在笛卡爾坐標(biāo)系下,倪振松[1]等,將剛體運(yùn)動(dòng)用雙四元數(shù)描述,但其構(gòu)造Dixon結(jié)式進(jìn)行消元求解,得到一元十六次方程,但其求解方程過程較為復(fù)雜,對(duì)計(jì)算機(jī)資源配置要求非常高。而Paden-Kahan法由于其自身局限性,因此通常將串聯(lián)機(jī)器人的運(yùn)動(dòng)學(xué)逆解分解為多個(gè)Paden-Kahan 子問題進(jìn)行求解。但在其空間幾何關(guān)系轉(zhuǎn)換過程中,計(jì)算量龐大,增加了整個(gè)計(jì)算過程的計(jì)算量。
3.1 求解機(jī)器人第6軸方向

帶下標(biāo)_ik 的符號(hào)表示運(yùn)動(dòng)學(xué)逆解中的變量,下同。


從而得到了機(jī)器人關(guān)節(jié)點(diǎn)的坐標(biāo)值pw_ik。
3.2 求解串聯(lián)機(jī)器人各個(gè)關(guān)節(jié)角
前三個(gè)關(guān)節(jié)角可以通過幾何關(guān)系求得:



圖2 平面二桿機(jī)構(gòu)示意圖

其中:a,b 分別表示平面二桿機(jī)構(gòu)的桿長,θi為關(guān)節(jié)i的轉(zhuǎn)角角度,當(dāng)桿長已知的情況下,通過上述方程組可以求得方程組的解為:

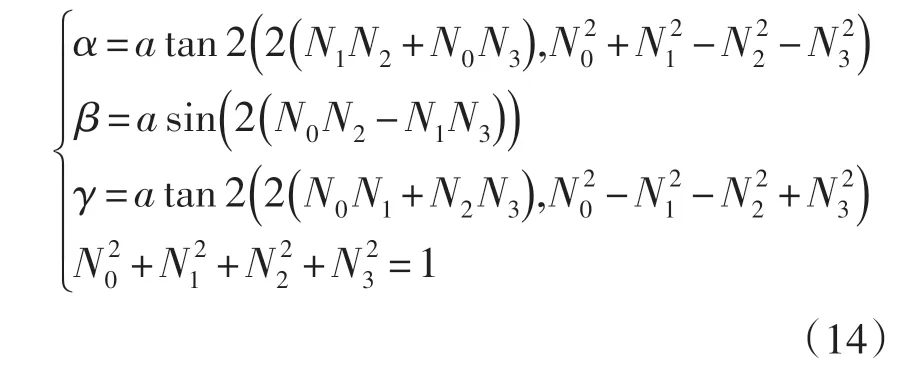
根據(jù)幾何關(guān)系,d5始終和d6、d4垂直,即:


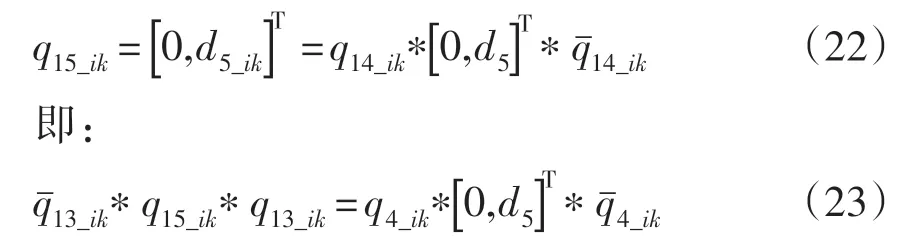
該等式等號(hào)左邊是一個(gè)常數(shù)值;等號(hào)右邊的物理意義是:第5關(guān)節(jié)的軸心線繞第4關(guān)節(jié)軸心線旋轉(zhuǎn)θ4后得到的結(jié)果。等式中唯一的變量是θ4_ik,根據(jù)等式很容易求得θ4_ik的值,等式中唯一的變量是θ4_ik,根據(jù)等式很容易求得θ4_ik的值。
同理:由于q16已知,通過以下等式


圖3 機(jī)器人模型圖
分別可以求得θ5_ik,θ6_ik。
至此6R串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)逆解全部求得。
4 四元數(shù)法求解6R串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)實(shí)例
本文針對(duì)如圖3 所示的機(jī)器人,進(jìn)行四元數(shù)法的6R串聯(lián)機(jī)器人的運(yùn)動(dòng)學(xué)仿真。該機(jī)器人幾何尺寸如表1。

表1 6R串聯(lián)機(jī)器人基本參數(shù)
4.1 正解
根據(jù)表格中的機(jī)器人的基本參數(shù),由公式(3),可以得到各軸心線旋轉(zhuǎn)的單位四元數(shù)描述:

再將公式(25)代入到公式(5)可以得到繞各軸心線變換的單位對(duì)偶四元數(shù)描述:

然后將表格中數(shù)據(jù)帶入到公式(8),可以得到各個(gè)軸心線在普呂克坐標(biāo)系下的直線方程:

將(26)(27)代入到公式(10)、(11)和公式(14),可以得到6R 串聯(lián)機(jī)器人的運(yùn)動(dòng)學(xué)正解,即機(jī)器人末端位置和姿態(tài)。
4.2 機(jī)器人運(yùn)動(dòng)學(xué)逆解
在已知機(jī)器人末端點(diǎn)位置PE_ik以及歐拉角αik,βik,γik的情況下,由公式(13)可以得到:

可以得到串聯(lián)機(jī)器人的6 個(gè)關(guān)節(jié)角θi(i=1,2,3,4,5,6)。
5 計(jì)算仿真
本文利用Matlab/robot toolbox工具箱建立機(jī)器人運(yùn)動(dòng)學(xué)模型,再對(duì)基于四元數(shù)法的6R串聯(lián)機(jī)器人的運(yùn)動(dòng)學(xué)逆解進(jìn)行了計(jì)算仿真。任意給定6 個(gè)關(guān)節(jié)的旋轉(zhuǎn)角度θi后,利用Matlab/Simulink 模型對(duì)運(yùn)動(dòng)學(xué)正解進(jìn)行仿真,得到機(jī)器人末端的位置坐標(biāo)(Position)及末端的歐拉角(EulerAngle),再將其輸入到運(yùn)動(dòng)學(xué)逆解模塊(Inverse Kinematic),得到8個(gè)運(yùn)動(dòng)學(xué)逆解結(jié)果。過程及結(jié)果如圖4所示。

圖4 串聯(lián)機(jī)器人運(yùn)動(dòng)學(xué)Simulink仿真模型
將經(jīng)過四元數(shù)正解后得到的機(jī)器人末端執(zhí)行器的姿態(tài)代入模型進(jìn)行運(yùn)動(dòng)學(xué)逆解模型進(jìn)行求解,得到8 組運(yùn)動(dòng)學(xué)逆解(如表2)。從表中數(shù)據(jù)可以看出,在誤差允許的范圍內(nèi),第1 組數(shù)據(jù)和輸入的數(shù)據(jù)完全一樣。在Matlab 中計(jì)算,該組數(shù)據(jù)的計(jì)算精度完全滿足工程應(yīng)用的需要。
并利用Matlab/robot toolbox建立的機(jī)器人運(yùn)動(dòng)學(xué)模型對(duì)該8 組運(yùn)動(dòng)學(xué)逆解進(jìn)行姿態(tài)仿真,得到圖5中的8個(gè)機(jī)器人姿態(tài)。

表2 6R機(jī)器人8組運(yùn)動(dòng)學(xué)逆解
6 結(jié)論
將超復(fù)數(shù)形式的四元數(shù)以及對(duì)偶四元數(shù)應(yīng)用于6R 串聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)正逆解分析的數(shù)學(xué)建模,用基于普呂克坐標(biāo)系的直線描述串聯(lián)機(jī)構(gòu)的連桿,避免機(jī)構(gòu)繁瑣的D-H法描述,物理意義簡潔明了。與D-H法相比,四元數(shù)中每一個(gè)元素都有很強(qiáng)的物理意義和計(jì)算意義,避免無效計(jì)算,占用計(jì)算機(jī)資源,影響著計(jì)算速度。
將運(yùn)動(dòng)學(xué)正解中點(diǎn)的旋轉(zhuǎn)變換轉(zhuǎn)化成變換后的直線的交點(diǎn),脫離了具體的各連桿的具體位置的計(jì)算。
在運(yùn)動(dòng)學(xué)逆解中,與傳統(tǒng)D-H 法通過求解矩陣的逆,再進(jìn)行矩陣乘法計(jì)算,最后解方程。四元素求共軛,只需將虛部正負(fù)號(hào)改變即刻,計(jì)算復(fù)雜度極其小。
D-H 法中,兩個(gè)4×4 矩陣A 和B 相乘得到矩陣C,一般共需要進(jìn)行7×16=112 次加法或乘法運(yùn)算;而四元數(shù)法中,兩個(gè)四元數(shù)相乘運(yùn)算,一般共需要進(jìn)行7×4=28 次加法或乘法運(yùn)算。從理論上,四元數(shù)的計(jì)算量也明顯小于矩陣的計(jì)算量。
四元數(shù)法直接得到各個(gè)關(guān)節(jié)旋轉(zhuǎn)角度的一元一次方程或者一元二次方程組,其計(jì)算復(fù)雜度為O(1),理論上計(jì)算復(fù)雜度大大降低。
四元數(shù)法大大簡化了計(jì)算過程,提高了計(jì)算效率和精度,便于機(jī)器人控制的實(shí)時(shí)性,在實(shí)際工程應(yīng)用中具有很強(qiáng)的實(shí)際意義。
采用四元數(shù)法,可以統(tǒng)一機(jī)器人的運(yùn)動(dòng)學(xué)中的位置和姿態(tài)[1],即在同一個(gè)坐標(biāo)系就可以完全描述6R機(jī)器人的運(yùn)動(dòng)學(xué)的正逆解。
四元數(shù)法除了可以描述轉(zhuǎn)動(dòng)副外,還可以描述移動(dòng)或者螺旋運(yùn)動(dòng)。因此本文研究的四元數(shù)法還可以推廣到螺旋副或者移動(dòng)副的運(yùn)動(dòng)機(jī)構(gòu)中,比如四元數(shù)用在第4 軸為滾珠絲杠花鍵軸的SCARA機(jī)器人的運(yùn)動(dòng)學(xué)的數(shù)學(xué)建模中。

圖5 6R機(jī)器人運(yùn)動(dòng)學(xué)8組逆解位姿
[1]Freudenstein F.Kinematics:past,present and future[J].Mechanism and Machine Theory,1973,8(2):151-161.
[2]李發(fā)忠,趙德安,馬從國.FANUC_M-6iB型機(jī)器人運(yùn)動(dòng)學(xué)逆解研究[J].機(jī)械設(shè)計(jì)與制造,2008(10):174-176.
[3]于艷秋,王品,廖啟征.一般6R機(jī)器人的位置反解與運(yùn) 動(dòng) 仿 真[J].中 國 機(jī) 械 工 程,2003(24):2130-2132.
[4]Emre Sariyildiz,Eray Cakiray and Hakan Temeltas.A comparative study of three inverse kinematic methods of serial industrial robot manipulators in the screw theory framework [J].International Journal of Advanced Robotic Systems,2011(8):9-24.
[5]Yurong Nan,Panfeng Wu.A New Method for the Inverse Kinematics of 6-DOF Manipulator Based on Dual Quaternion[J].Advances in Mechanical and Electronic Engineering Lecture Notes in Electrical Engineering,2012(176):295-302.
[6]AHN Jin-su,CHUNG Won-jee,JUNG Chang-doo.Realization of orientation interpolation of 6-axis articulated robot using quaternion[J].J.Cent.South Univ,2012(19):3407-3414.
[7]程國采.四元數(shù)法及其應(yīng)用[M].長沙:國防科技大學(xué)出版社,1991.
[8]E.Sariyildiz,H.Temeltas,Solution of Inverse Kinematic Problem for Serial Robot Using Dual Quaternions and Plücker Coordinates[A].IEEE/ASME International Conference on Advanced Intelligent Mechatronics[C].Suntec Convention and Exhibition Center Singapore,July 14-17,2009.
[9]TSAI L W,MORGAN A.Solving the kinematics of the most general six and five-degree-of-freedom manipulators by continuation methods[J].Mechanism and Machine Theory,1985,107(2):189-200.
[10]倪振松,廖啟征,魏世民,等.空間6R 機(jī)器人位置反解的對(duì)偶四元數(shù)法[J].機(jī)械工程學(xué)報(bào),2009(11):25-29.
[11]Li Jing,Wang Huinan,Liu Haiying.Dual Quaternion Curve Interpolation Algorithm for Formation Satellites[J].Transactions of Nanjing University of Aeronautics&Astronautics,2012,29(1).
