青草沙水庫圍堤龍口截流工程水文監測系統的研制
2013-06-07 07:17:13杜亞南吳敬文
水利水電科技進展 2013年3期
杜亞南,吳敬文,李 保
(長江水利委員會水文局長江口水文水資源勘測局,上海 200136)
青草沙水庫圍堤龍口截流工程水文監測系統的研制
杜亞南,吳敬文,李 保
(長江水利委員會水文局長江口水文水資源勘測局,上海 200136)
為確保青草沙水庫圍堤龍口截流工程的順利進行,設計并研制了專用于高流速、高落差水域進行水位、流速及流向測量的水文監測系統。系統將GPS移動臺置于密封的浮球內,浮球內安置姿態傳感器、數字羅經以及數據存儲設備,利用GPS實測數據,結合浮球姿態參數、GPS天線在船體坐標系下的坐標、船體坐標系到水面的垂直距離,通過PPK解算、姿態改正等處理,聯合確定水面的高程和流速。實際監測結果表明,系統性能穩定,測量結果與實際情況一致,有效地解決了高流速、高落差龍口水域流速、流向和水位難以確定的問題。
龍口截流工程;水文監測系統;流速;流向;水位;青草沙水庫
長江口青草沙水庫原水工程是造福上海市民飲用水安全的民生工程。青草沙水庫圈圍面積近70 km2,新建圍堤長達22 km,工程于2007年12月正式開工,2009年1月新建大堤合龍,2010年12月完工。截流是工程的關鍵環節,截流順利與否直接關系到工程建設的整體進度。因此,在截流期對龍口進行實時水文監測,掌握龍口水文要素的動態變化,可以為施工組織決策提供重要的科學依據。
目前龍口水域的流速、流向測量多采用聲學多普勒流速剖面儀(acoustic doppler current profilers, ADCP),但ADCP難以提供水面流速和流向[1],且載有ADCP的測量船難以在龍口高流速(最大流速達6 m/s[2])、高落差(最大落差達1.1 m[2])的水域進行測量。目前國內外還沒有能夠在高流速、高落差水域進行水位、流速和流向測量的方法和系統,國內諸多截流工程均因技術原因難以實施水位、流速及流向的測量,因此,必須開展相關技術創新。為此,組織成立了專門的科研隊伍和測量小組,研制了專用于高流速、高落差水域進行水位、流速及流向測量的水文監測系統,并通過GPS動態后處理(post processed kinematic,PPK)解算、姿態改正等處理,聯合確定水面的高程和流速。
1 水文監測系統的設計
1.1 水文監測系統的組成
截流區龍口水域流速和水位落差均較大,改變了自然河流水位和流速的特性,形成了復雜的局部水文特征,使水力學指標發生變化,帶來較顯著的泥沙沖刷和明顯的河床變遷,并給截流工程帶來安全隱患[3-4]。龍口水域流速和落差大,測量船航行不安全,難以采用船載GPS進行潮位測量[5-6]以及水面流速、流向測量。為確保項目的順利實施,設計了專用于該特征水文條件下的浮標測量系統。水文監測系統的組成如下:浮球3個(大浮球2個,小浮球1個),用于承載測量設備和漂流;配重塊5個(每個大浮球有2個配重塊,小浮球有1個配重塊),用于穩定浮球;GPS雙頻接收機2臺,一臺在基準站,另一臺在流動站,進行GPS PPK測量;姿態傳感器TSS 1套,其功能是檢測浮球姿態變化;數字羅經1個,用于檢測航向;數據采集系統和存儲系統1套,用于采集和存儲浮標內各傳感器的測量數據;全站儀及附屬設備1套,用于測量浮球內各設備在浮球坐標系內的坐標及船體坐標系到水面的垂直距離;吊車1輛,用于下放和吊起浮球。
1.2 水文監測系統的設計及安裝
水文監測系統如圖1所示,將一臺GPS接收機安置在基準站上,將另一臺GPS接收機天線安置在浮球水面上,主機置于浮球內。在浮球下底面中心位置安裝姿態傳感器MRU(motion reference unite),將數字羅經安置在MRU上方,然后安置數據存儲設備,并將配重塊懸浮于水面下。

圖1 水文監測系統
水文監測系統安裝后,需要做好以下準備工作:①定義浮球坐標系(buoy frame system,BFS);②測定浮球頂部GPS天線ORP點在BFS中的相對坐標;③確定浮球吃水線位置;④浮球自然懸垂時,測定浮球吃水線相對浮球頂部GPS天線相位中心的垂距以及相對MRU中心的垂距;⑤對MRU進行初始化,確定MRU的安裝偏差;⑥對數字羅經進行初始化,為數字羅經提供真北方位。
2 水文監測系統的工作原理和數據處理
水文監測系統的工作原理是利用GPS實測數據,結合浮球姿態參數、GPS天線在船體坐標系下的坐標、船體坐標系到水面的垂直距離,通過PPK解算、姿態改正等處理,聯合確定水面的高程和流速。
2.1 PPK定位
考慮到龍口截流期施工條件復雜,使用RTK技術差分數據鏈容易被遮擋而失鎖。PPK與RTK工作模式不同,基準站與流動站只需將GPS的原始數據記錄下來,無需數據通訊。事后利用國際GPS服務組織(IGS)提供的精密星歷、原始記錄數據和基準站的已知坐標,解算出基準站的相位改正數。由于基準站和流動站間的定位誤差具有很好的空間相關性,因此,利用基準站的相位改正數對流動站的相位觀測數據進行改正,進而獲得流動站的準確三維位置[3-6]。
2.2 姿態改正
浮標自由漂流時,由于風浪的作用會發生橫搖、縱搖等姿態變化。這些變化改變了GPS天線在理想船體坐標系VFS下的坐標,為了獲得準確的瞬時水面高程,必須進行姿態處理。姿態參數利用MRU獲得,姿態改正在船體(浮球)坐標系下進行[7-9]。
若GPS接收機天線在浮球坐標系BFS下的坐標為(dXG,dYG,dhG),瞬時姿態參數橫搖和縱搖分別是R、P,則GPS天線在BFS下的瞬時坐標(dXG-BFS,dYG-BFS,dhG-BFS)為
式中:RP和RR分別為由橫搖和縱搖構成的旋轉矩陣。
理想情況下,若BFS原點ORP在水面的投影點p的坐標為(dXp,dYp,dhp),則p在BFS下的瞬時坐標(dXp-BFS,dYp-BFS,dhp-BFS)為
上述姿態改正起到了以下3方面的作用:①獲取瞬時海面高程,用于后續在航水位的提取;②獲取GPS在水面上的投影,用于后續流速和流向的確定;③消除姿態影響,提高定位精度,用于后續水位、流速、流向的精確確定。
2.3 水面高程、流速、流向的確定
根據姿態改正結果,獲得了GPS天線相位中心、GPS天線在浮球吃水面上投影點相對BFS的坐標,利用坐標之間的關系,可以得到GPS天線在水面投影點的坐標,根據轉換和計算,水面投影點p在地理坐標系GFS中的坐標為

t時刻投影點實際上是水面某質點,該點的運動特性反映了水面的運動特征,基于此,從該質點運動的時序中提取出不同位置的水位。
a.水位的確定[3-9]。水位提取主要利用p點的高程序列來實現。理想狀態下,p點的高程序列反映了水面的起伏變化,但由于波浪、浮球自身因為水體的沖擊造成的上下起伏變化,該點高程序列并不完全代表水位,需要進行濾波處理,以消除波浪等因素的影響。由于波浪的周期遠小于水位的變化周期,因此需要設計一個低通濾波器。采用快速傅里葉變換(FFT)來設計低通濾波器,以實現水位的提取。越接近龍口,水位變化周期越短,落差越大,該特征決定了基于FFT低通濾波提取水位不能采用單一截止周期,需根據區段水位變化自適應地給出截止周期,因此對漂流區域的時序數據進行區段劃分和頻譜分析,并計算相應的截止周期。獲得了各個區段的截止周期后可實現水位的提取。確定了水位后,根據式(3)提供的平面坐標,換算到經過姿態改正后的地理坐標系GRF下的坐標(Xp-GRF,Yp-GRF),便可以得到不同位置處的水位。
b.流速的確定。利用式(3)獲得不同時刻投影點p的三維坐標,進一步換算得到經過姿態改正后的GRF坐標系下的坐標(Xp-GRF,Yp-GRF,hp-GRF),便可確定該質點在相鄰兩個時刻的運動速度v:

由于GPS采樣更新率為20Hz,則得到的p點的運動速度更新率也為20 Hz,這樣的更新率完全可以反映水面的瞬時流速和流向。
c.流向的確定。水流的方向即浮球的航向,可以通過GPS來確定,也可以通過數字羅經確定。水流方向A為

式中:AG為GPS確定的浮標航向,(°);AC為數字羅經確定的航向,(°);QGA和QCA分別為加權融合給出的GPS航向和羅經航向的權值。
3 水文監測系統測量步驟及驗證
3.1 測量步驟
步驟1:在測區內岸邊已知點上架設基準站,利用GPS進行靜態數據采集,采樣頻率設置為20 Hz。
步驟2:每次測量前,浮球上GPS接收機進行PPK測量,采樣頻率設置為20 Hz。在將設備置入浮球之前需要進行GPS初始化和羅經初始化。
步驟3:將GPS主機、MRU和數字羅經安放在浮球內,安置時要確保數字羅經的軸向與MRU的X軸平行;用隔離板隔離,確保其不被水浸入。
步驟4:利用吊車將浮球吊起,并觀測數據,用于MRU安置偏差的探測。
步驟5:在將浮球放入水中之前采集MRU姿態數據、羅經數據和GPS定位數據。
步驟6:封閉浮球上口,懸掛配重塊,在急流水道始端下放浮球,讓其自然漂流。
步驟7:完成龍口急流水道漂流后,收回浮球,停止數據采集,關閉GPS、MRU及數字羅經。
步驟8:確認數據正確后,提取數據。
步驟9:處理數據,計算不同時刻和不同位置的流速、流向及水面高程。
步驟10:提交成果。
3.2 水位比較
為了驗證上述理論和方法的正確性,在漂流開始和結束時刻將每期浮球測得水位與庫區內、外設立的潮位站水位數據進行比較,見表1。從統計結果看,除某個別時間因潮位站附近船只活動引起水位異常,并導致較大水位偏差外,其他時刻水位偏差均在10 cm以內。

表1 浮球水位與潮位站水位的比較
相對潮位站水位,浮球水位最大偏差為13.0 cm,最小偏差為0 cm,平均偏差為3.2 cm,標準偏差為5.7cm。這表明系統所采用的技術路線和實施方法是正確的,保持了較高的水位測量精度,可滿足實際工程需求。
3.3 流速和流向比較
為了進一步說明該系統確定流速的準確性,將利用本文系統測得的GPS流速與高速流速儀測得的流速進行比較。從比較結果來看,基于GPS浮球的水文監測系統測得的流速與高速流速儀測得的表層流速保持了很高的一致性,將二者差值進行統計分析,見表2,可知最小偏差為0.01 m/s,最大偏差為0.07 m/s,平均偏差為0.02 m/s,系統標準偏差為0.037 m/s。
由此可知,基于GPS浮球的水文監測系統測量青草沙水庫龍口水域的水位和流速具有很高的精度,系統性能穩定,可以承擔龍口高流速、高落差水文條件下的水面水位、流速和流向的測量。
4 水文監測系統的應用實踐
2008年12月18—24日在龍口截流期間共進行了18次浮球漂流監測,成功計算出結果的測次為14次,成功率為78%,其余幾個測次由于儀器的碰撞和施工船只的干擾未能計算出結果。
每次漂流流程如下:在每次測量前安置基準站。漂流前首先對流動站進行初始化,時間為10 min;將設備置于浮球內,用密封層隔離,并用外蓋密封。將密封好的浮球系在船舷邊,拖到施放點施放,浮球隨水流自然漂流,直至進入緩水區。監測結束后將浮球拖曳到船舷邊,停止數據采集,提取測量數據,并進行數據處理。最后統計處理結果。各測次水文監測時間、潮汐特征、水位變化、流速變化以及流向變化如表3所示。由表3可知,測量結果與實際情況一致,系統性能穩定,數據處理方法正確,有效地解決了高流速、高落差龍口水域流速、流向和水位難以確定的問題。
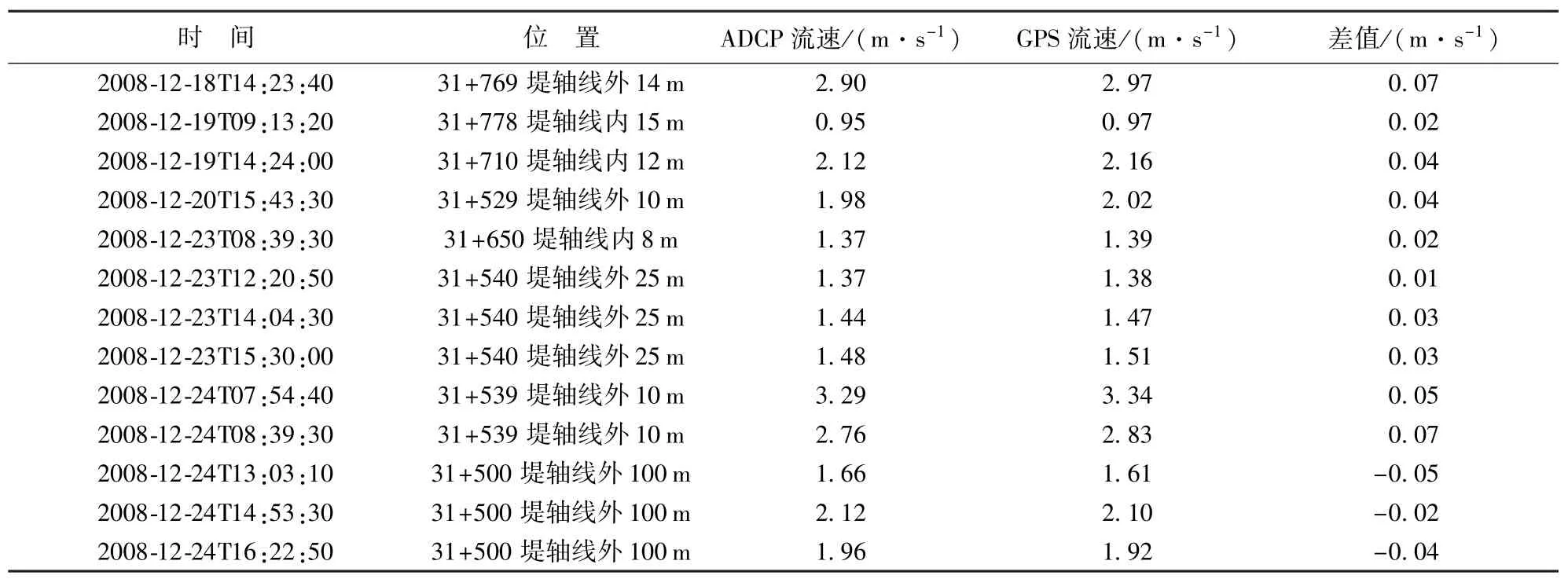
表2 GPS流速與高速流速儀表層流速的比較

表3 不同測次時間安排及統計參數
5 結 語
水文監測系統的研制提供了一種水面流速、流向自動獲取的方法,有效地解決了高流速、高落差龍口水域流速、流向和水位難以確定的問題。該系統采用集成的數據處理系統,利用GPS實測數據,結合浮球姿態參數、GPS天線在船體坐標系下的坐標、船體坐標系到水面的垂直距離,通過PPK解算、姿態改正等處理,聯合確定水面的高程和流速。系統采用多源信息融合技術,彌補了單一設備測量的不足,增強了參數計算的可靠性和穩定性,且操作簡單、耗費低廉,是一項技術革新。該系統在青草沙水庫龍口高流速、高落差水文條件下的水位、流速、流向測量結果表明,系統性能穩定,數據處理方法正確,測量方法可靠,測量成果與實際一致,獲取的數據可為龍口截流期的科學施工與數模反演提供原型觀測資料,可在其他工程龍口水文監測中推廣應用。
[1]田淳,劉少華.聲學多普勒測流原理及其應用[M].鄭州:黃河水利出版社,2003:54-55.
[2]程海云,葛守西.三峽工程明渠截流龍口水文預報實踐[J].人民長江,2000(3):11-18.(CHEN Haiyun,GOU Shouxi.Hydrological forecast and practice of closure of open channel of the Three Gorges[J].Yangtze River,2003(3): 11-18.(in Chinese))
[3]張紅梅,顧玉亮,樂勤,等.基于PPK的龍口水位測量及自適應提取方法研究[J].武漢大學學報:信息科學版, 2011,36(1):44-47.(ZHANG Hongmei,GU Yuliang,LE Qin,et al.Study on measurement system and adaptive extraction of closure-gap water level[J].Geomatics and Information Science of Wuhan University,2011,36(1):44-47.(in Chinese))
[4]于東生.基于ADCP的長江口水沙運動分析及三維水流數學模型[D].南京:河海大學,2005.
[5]趙建虎,王勝平,張紅梅,等.基于GPS PPK/PPP的長距離潮位測量[J].武漢大學學報:信息科學版,2008,33 (9):910-913.(ZHAOJianhu,WANGShengping, ZHANG Hongmei,et al.Long-distance and on-the-fly GPS tidal level measurement based on GPS PPK/PPP[J]. Geomatics and Information Science of Wuhan University, 2008,33(9):910-913.(in Chinese))
[6]陽凡林,趙建虎,張紅梅,等.RTK高程和Heave信號的融合及精度分析[J].武漢大學學報:信息科學版,2007, 32(3):228-255.(YANG Fanlin,ZHAO Jianhu,ZHANG Hongmei,et al.Blend of RTK height signal and heave signal and accuracy analysis[J].Geomatics and Information Science of Wuhan University,2007,32(3):228-255.(in Chinese))
[7]張紅梅,趙建虎.精密多波束測量中GPS高程誤差的綜合修正法[J].測繪學報,2009,38(1):22-27.(ZHANG Hongmei,ZHAO Jianhu.Quality control of GPS height in precise MBS measurement[J].Geomatics and Information Science of Wuhan University,2009,38(1):22-27.(in Chinese))
[8]周豐年,田淳.利用GPS在無驗潮模式下進行江河水下地形測量[J].測繪通報,2001(5):28-30.(ZHOU Fengnian,TIAN Chun.Surveying of underwater topography without tidal observation by using GPS[J].Bulletin of Surveying and Mapping,2001(5):28-30.(in Chinese))
[9]趙建虎.多波束深度及圖像數據處理方法研究[D].武漢:武漢大學,2002.
·簡訊·
水文水資源與水利工程科學國家重點實驗室接受科技部現場評估
2013年3月,受國家科技部委托,國家自然科學基金委組織專家對水文水資源與水利工程科學國家重點實驗室進行現場評估。專家組召開了評估報告會,實驗室主任彭世彰教授就5年來實驗室的研究水平與貢獻、隊伍建設與人才培養、開放交流與運行管理等作了工作匯報,張建云院士、任立良教授、唐洪武教授、陸永軍教高、顧沖時教授分別作代表性成果學術報告。河海大學校長王乘教授、副校長徐衛亞教授、南京水利科學研究院院長張建云院士、副院長李云教高、副院長戴濟群教高等依托單位領導出席了現場評估報告會,吳中如院士和團隊學術帶頭人以及研究骨干參加會議。在現場考察中,評估專家組分別考察了實驗室公共實驗平臺、水環境綜合治理實驗廳和水工新材料試驗廳以及鐵心橋試驗基地等,對實驗室的工作狀態、研究工作情況、儀器設備運行和共享、人才隊伍建設和對外開放、管理工作等進行檢查,核實科研成果,抽查實驗記錄,并進行個別訪談等。
國家重點實驗室在本評估期圍繞5個研究方向開展水科學應用基礎研究,突出重大工程關鍵技術創新。實驗室主持了“973”計劃項目、國家自然科學基金重大計劃項目等一批具有重大影響的國家級科研項目,在水資源演變及其對氣候變化的響應評估、不同陸面特征的水文過程機理及模擬、平原河流水動力過程及防洪安全調控、河口海岸灘涂高強度開發與治理關鍵技術、重大水工程服役風險分析與調控理論和方法等方面取得了突出研究成果,尤其在氣候變化和人類活動對流域水文過程的影響規律的探索、產匯流理論與水文模型的發展方面,為水文學領域的研究作出了重要貢獻,在本學科領域具有突出的學術地位。
(本刊編輯部供稿)
Development of hydrological monitoring system for closure gap engineering of Qingcaosha Reservoir
//DU Yanan, WU Jingwen,LI Bao(Yangtze River Estuary Survey Bureau of Hydrology and Water Resource,Changjiang Water Resources Commission,Shanghai 200136,China)
To ensure the running smoothly of closure gap engineering of Qingcaosha Reservoir,a hydrological monitoring system was designed for measuring water levels and flow velocity and direction of water surface with high speed and high drop.In this system,a mobile GPS station,attitude sensors,digital compass,and storage devices are all installed in a sealed float.Based on the GPS observed data,attitude parameters of the sealed float,coordinates of GPS antenna in the hull coordinate system,and the vertical distance from the hull coordinate system to water surface,the water surface elevation and velocity were obtained using PPK calculating and correcting methods.The results show that the monitoring data of the system is in good agreement with the actual situation,indicating that the system is reliable,and can solve the problems of measuring water levels and surface velocity of closure gap water area with high speed and high drop.
closure gap engineering;hydrological monitoring system;flow velocity;flow direction;water level; Qingcaosha Reservoir
10.3880/j.issn.10067647.2013.03.012
TV123
A
10067647(2013)03005405
2012-11-29 編輯:駱超)
杜亞南(1970—),男,江蘇如皋人,高級工程師,主要從事水文測繪技術研究。E-mail:cjkduyn@126.com
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45
