一種用于制導雷達的交互多模型跟蹤濾波算法
2013-06-08 08:40:36吳超,單奇
雷達與對抗 2013年2期
關鍵詞:模型
吳 超,單 奇
(中國電子科技集團公司第三十八研究所,合肥 230088)
0 引言
制導雷達系統是一種由各類探測、控制、數據傳輸、通信等設備集成的防空導彈武器系統中的地面設備[1]。制導雷達的數據處理分系統需要完成發現目標、形成航跡、識別分類、威脅估計、火控跟蹤、殺傷評估等多個任務[2]。其中,數據處理使用的跟蹤濾波算法直接決定著雷達形成航跡的精度,影響防空導彈武器系統的殺傷能力,是制導雷達系統研究的核心課題之一。
隨著當前第四代戰斗機技術的成熟和世界各國現役戰斗機向四代機的批量換裝,防空導彈系統面臨著嚴峻的挑戰。第四代戰斗機普遍具備超機動能力,其加速度可達9G左右,戰斗機的飛行軌跡在空間位置上可以表現出距離變化率銳減、驟增等現象。這就要求雷達系統具備更高的數據率和高精度的跟蹤能力來精確掌控飛機的運動軌跡。
國內外制導雷達數據處理多采用α-β 濾波、卡爾曼濾波、自適應卡爾曼濾波或者交互多模型等方法,在濾波過程中使用CV、CA、Singer 等直線運動模型[3]。使用直線模型逐段擬合目標飛行軌跡的這類型方法在低數據率跟蹤弱機動能力的目標時可以獲得滿意的精度。但是,用于對具備高機動性飛機執行跟蹤時,運動模型與機動模式的不匹配將導致跟蹤精度的大幅度降低,甚至引致濾波器發散目標丟批,嚴重制約著防空導彈系統的殺傷性能。
針對上述問題,本文提出了一種用于制導雷達的新的交互多模型跟蹤濾波方法。與傳統的使用直線運動模型的交互多模型算法相比,本文提出的方法顯著提高了跟蹤的精度,同時對于目標機動/非機動轉換有一定的識別能力和魯棒的跟蹤性能。
1 考慮轉彎機動的交互多模型跟蹤方法
1.1 UKF-IMM3方法描述
在航跡跟蹤中,任意的時刻目標可能進行已知和未知的機動,使得目標運動模式具備不確定性。這種不確定性導致目標機動跟蹤成為一個混合估計問題。作為解決混合系統狀態估計的次優算法,交互多模型算法(IMM)是國內外雷達數據處理中使用較為普遍的跟蹤算法。利用交互式多模型算法對當前時刻目標狀態進行估計時,考慮每個模型都有可能成為當前有效的系統模型,每個濾波器的初始條件都是基于前一時刻各條件模型濾波結果的合成。
影響交互多模型算法性能的一個關鍵因素是目標運動模型集的選擇。以往對飛機目標的運動建模中,常選用常速度模型(CV 模型)和Singer 模型[4]。CV模型反映了目標常速度沿直線飛行時的運動狀態,Singer 模型反映目標加速度為零均值一階馬爾科夫過程時目標的運動狀態。這兩種模型的運動方程是線性的,能很好地擬合目標直線航路飛行下一時刻狀態與當前時刻狀態之間的遞推關系。但是,當前各國主力戰機都已具備反電子偵察手段,飛行員在獲知戰機被防空導彈系統鎖定的情報時會操縱戰機做大范圍高強度的機動飛行直至擺脫鎖定。在這一系列戰術動作中,飛機的航路不再是直線,使用CV和Singer 模型進行跟蹤必然精度下降甚至失跟。
因此,本文提出了一種考慮轉彎機動的交互多模型濾波(UKF-IMM3)方法。該方法的模型集包括非機動段常速運動模式CV 模型、直線機動模式Singer模型和曲線機動模式常速轉彎模型(Constant Turn,CT 模型)。
整個UKF-IMM3 濾波方法的執行流程如圖1所示:
(1)對雷達量測作坐標變換,計算變換導致誤差的前兩階矩。根據一階矩對變換后量測進行無偏修正,根據二階矩構造量測噪聲協方差矩陣。
(2)使用3個模型濾波器并行執行當前時刻點跡的濾波,CV和Singer 模型使用卡爾曼濾波器,CT 模型使用不敏卡爾曼濾波器。
(3)根據各濾波器的協方差矩陣分配權重,計算各濾波器輸出的加權結果作為對當前點跡的整體濾波輸出。
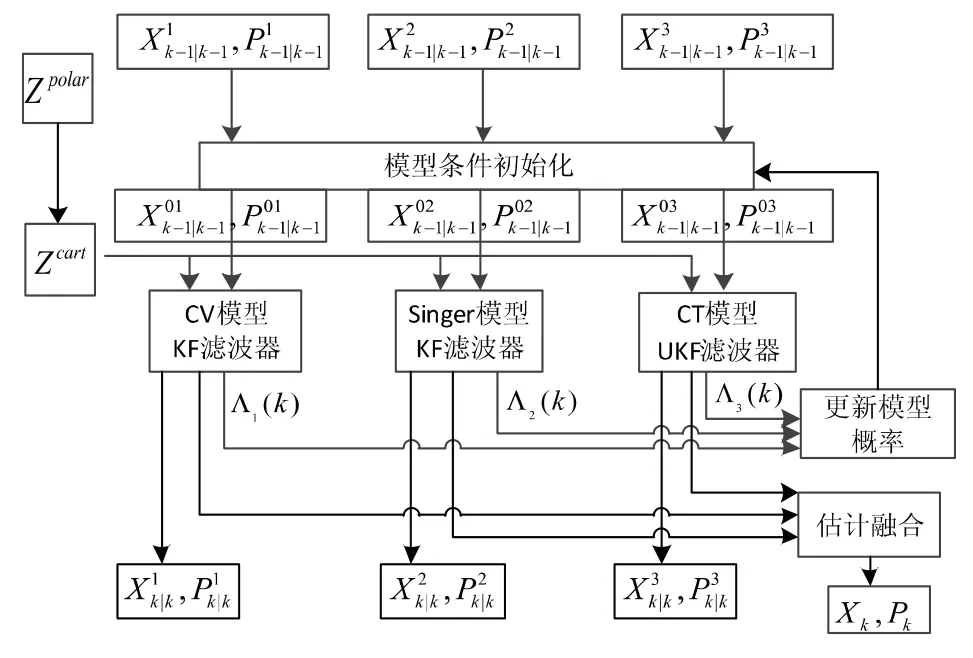
圖1 UKF-IMM3 濾波方法的執行流程
1.2 二維修正無偏的量測轉換
對于雷達來說,目標的測量通常在空間極坐標系中完成,而后續的量測數據處理是在直角坐標系中完成。在將雷達量測數據用于數據處理之前,需要通過合適的坐標轉換方法把量測數據從極坐標系轉換到直角坐標系中。Duan[5]等在2004年提出的修正無偏的量測轉換是目前從極坐標系到直角坐標系轉換的精度較高的計算方法。
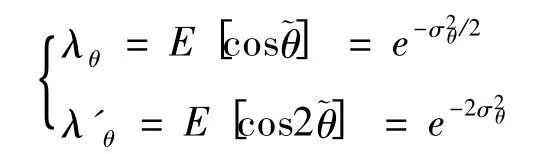
對于量測數據距離r、方位θ,其具有距離量測誤差~r、方位量測誤差~θ,兩者相互獨立,滿足高斯分布,均值為零且標準差分別為δr,δθ。其坐標變換公式為
量測噪聲矩陣為
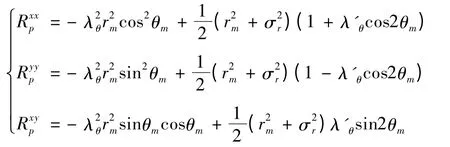
其中
使用修正無偏量測轉換之后對于X,Y的數據可以執行后續的解耦濾波。
1.3 交互多模型算法
交互多模型算法是一個遞推算法。該算法的一個循環過程如下[6]:
步驟1 輸入交互
模型預測概率:

混合概率:

其中i,j=1,…,r。
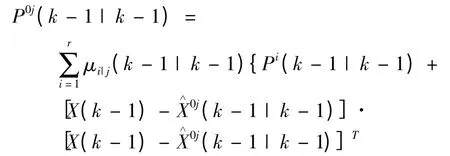
濾波器初始狀態估計:

其中j=1,…,r。
步驟2 模型匹配濾波與預測
卡爾曼濾波:
把濾波結果作為下一時刻與模型Mj相匹配的濾波輸入變量,然后每個濾波器按照各自的卡爾曼濾波算法進行狀態濾波得到各自的狀態估計^Xi(k|k)及協方差矩陣Pi(k|k)。
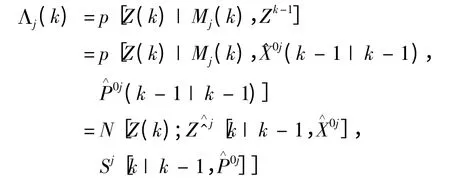
計算似然函數Λj(k):
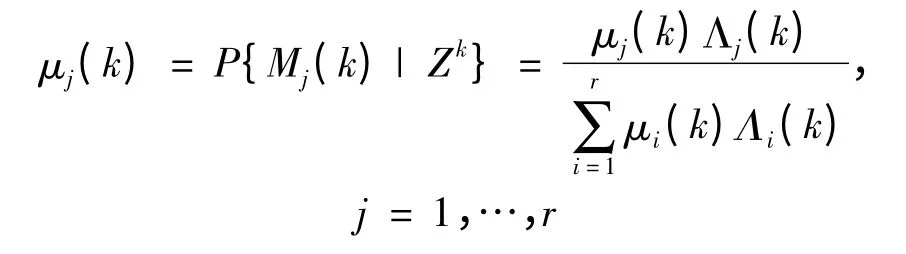
步驟3 模型概率更新
計算模型Mj的后驗概率:
步驟4 輸出綜合
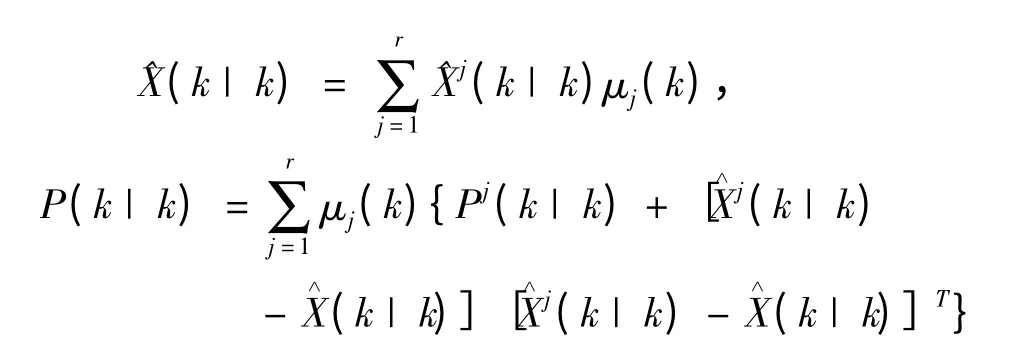
IMM 濾波方法在一個濾波周期內同時進行多個基于不同目標運動模型的濾波器工作的算法,該算法整體狀態估計通常為多個濾波器狀態估計的有效混合。通過同時使用多個模型,有效的解決了估計過程中由于目標模型的不確定性而帶來的困難。
1.4 不敏卡爾曼濾波(UKF)
UKF 是基于不敏變換發展起來的。它通過一組確定大小的樣本點來反映狀態向量的分布,經過任意非線性函數轉換后,這些樣本點仍能夠很好地反映狀態的分布,從而精度可以逼近2 階以上[7]。詳盡的UKF算法步驟可以參見文獻[8-9]。
2 運動模型
2.1 CV 模型

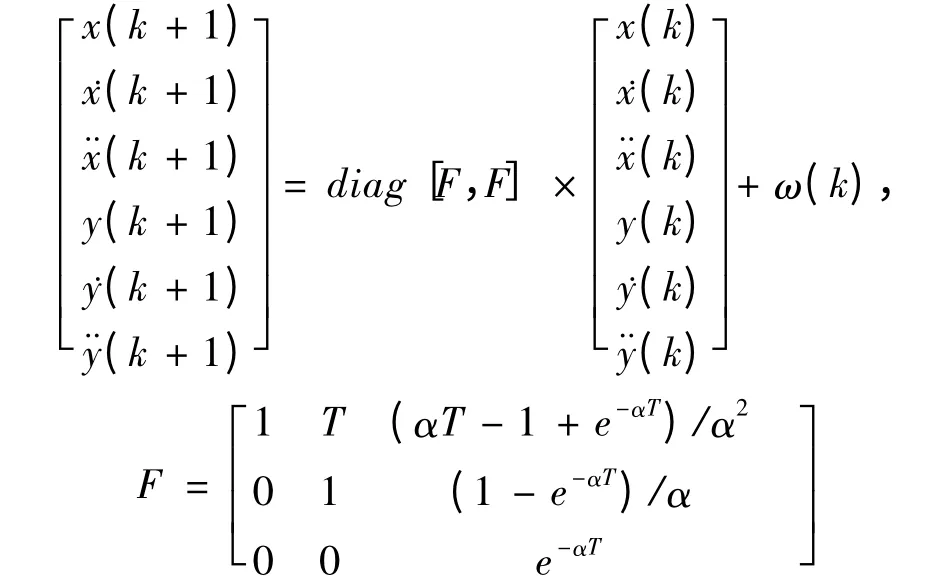
離散化后二維CV 模型的時間系統表達式為
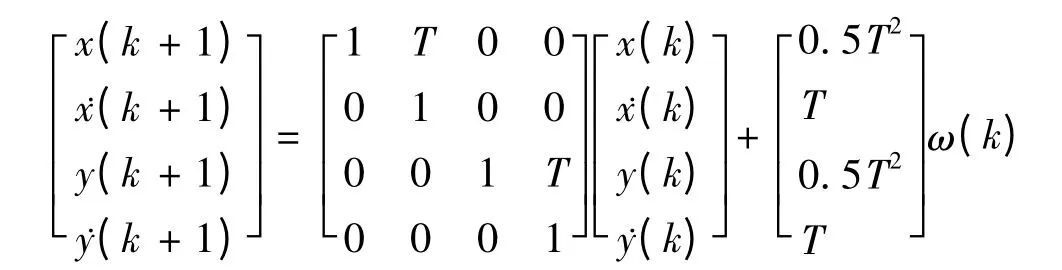
其中,ω(k)是均值為零、方差為δ2的高斯白噪聲。
2.2 Singer 模型
Singer 模型把機動噪聲作為有色噪聲建立數學模型,認為目標加速度是具有指數自相關的零均值隨機過程。
離散化后二維Singer 模型的時間系統表達式為
其中,ω(k)是零均值白噪聲過程;方差為2ασ2,σ2為機動加速度方差,α 是機動時間常數τ的倒數,其取值依賴于機動時間持續長短。
2.3 CT 模型
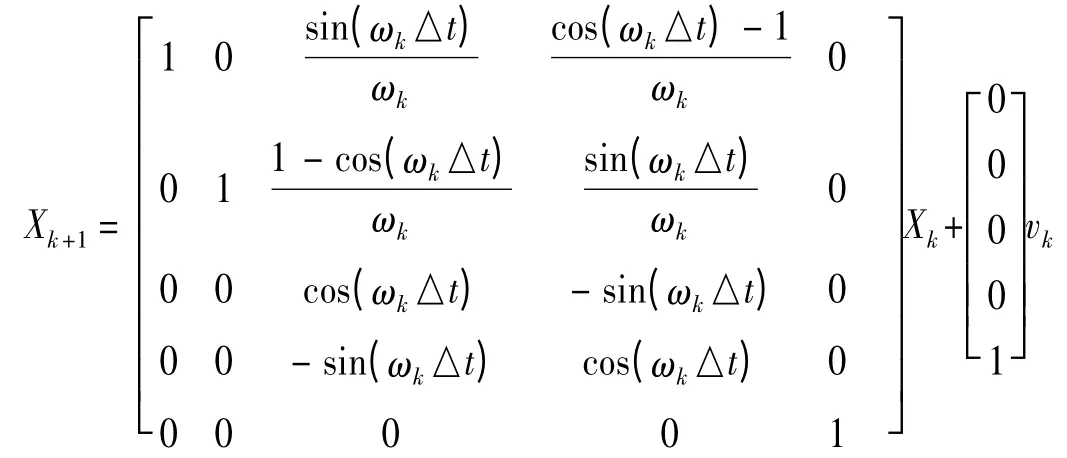
由于武器系統應對的多是敵方目標,在缺乏目標類型的先驗知識的情況下,敵目標機動能力無法確定,也就不能得到敵目標圓周運動的角速度先驗,所以本文的濾波算法中加入了未知轉彎角速度ω的CT 運動模型[10]。
在未知轉彎角速度ω的CT 模型中,目標轉彎角速度作為狀態向量中的一個分量需要估計。此時擴展的目標狀態向量為

離散二維CV 模型的時間系統表達式為
3 仿真實驗
實驗采用Matlab (2008a)軟件進行仿真計算。實驗場景包含了對目標9G 加速度的機動規避和多次機動的仿真模擬。仿真產生的航跡數據加入量測噪聲,假設雷達距離量測精度為60 m,方位角量測精度為0.1°,跟蹤數據率為16 Hz。實驗中對本文提出的使用CV、Singer、CT 運動模型的交互多模型不敏卡爾曼濾波算法(UKF-IMM3算法)與現有的使用CV、Singer 運動模型的交互多模型卡爾曼濾波算法(KFIMM2算法)采用蒙特卡羅仿真(獨立運行100 次)進行對比分析。
3.1 實驗場景1
在航路仿真的過程中,目標飛行速度設置為1260 km/h。假設雷達站處于坐標原點,目標從(137 km,143 km)處進入,向站直線飛行80 km,然后以9 G的加速度逆時針轉半圈,之后背站直線飛行20 km,再以9G的加速度順時針轉半圈,最后直線飛向雷達站。其中一次仿真加噪的航路如圖2所示。
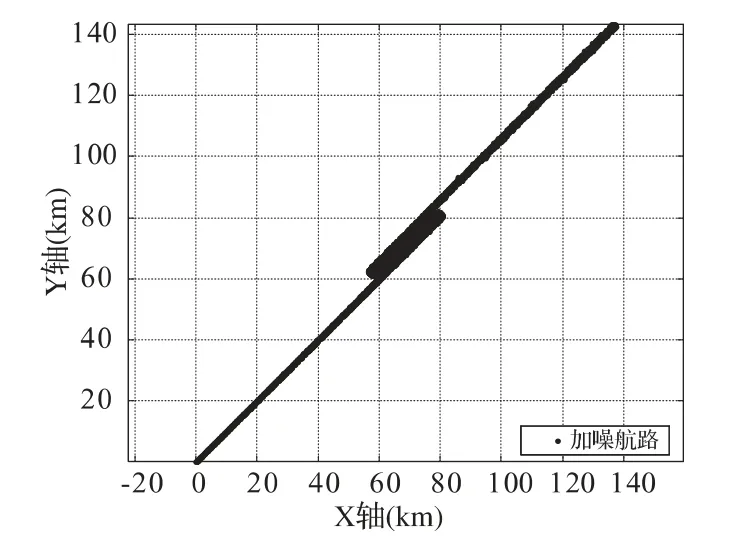
圖2 場景1 航路仿真圖
在模型狀態方程的設計上,CV 模型選擇小的噪聲方差qcv=1e-6以準確模擬直線飛行;Singer模型選擇噪聲方差qsinger=1和α=1/20 提高模型的適應性,避免濾波發散;由于CT 模型的先驗角速度不可靠,所以設置大的噪聲方差qcT=1。
圖3 顯示了跟蹤場景①航路時UKF-IMM3算法各模型的概率變化。在320 s 附近和410 s 附近,CT模型的概率明顯上升達到3個模型概率的最大值,此時正是目標進行機動轉彎的時刻;其余時間CV 模型和Singer 模型的概率都大于CT 模型(CV 模型的概率大于Singer 模型),符合目標進行直線飛行的運動狀態。
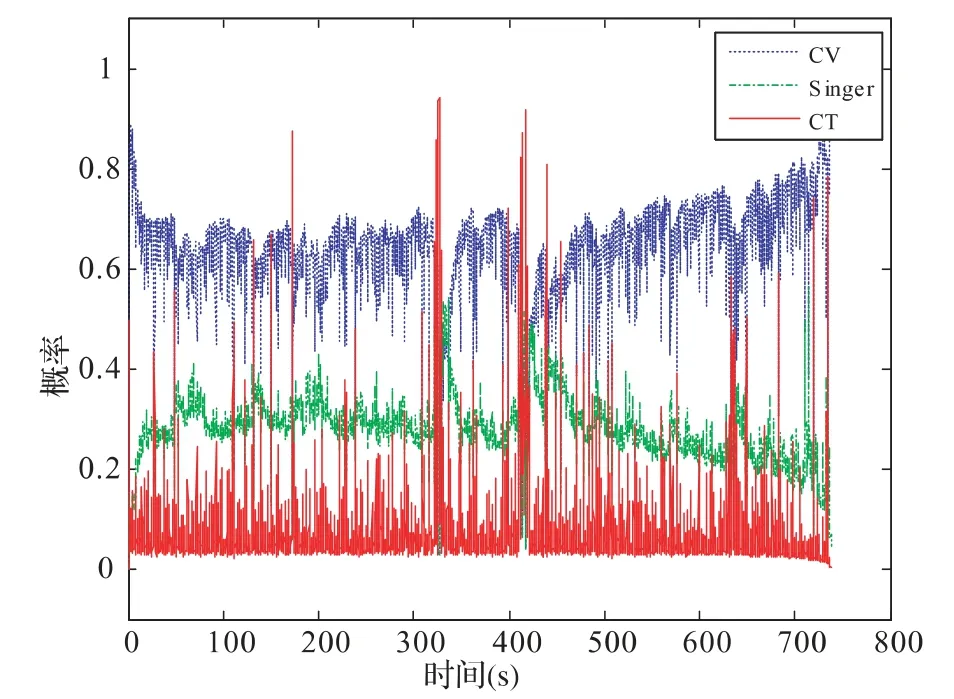
圖3 場景1 跟蹤UKF-IMM3 各模型的概率
圖4 是兩種算法對場景1 跟蹤的X和Y 位置均方根誤差圖(實驗數據圖中的曲線根據16 Hz為刻度的數據點繪制,為了圖形的清晰,僅在每隔10 s的數據點畫上標識符號,下同)。其中加號線是量測的誤差曲線,叉號線是KF-IMM2的誤差曲線,圈號線是UKF-IMM3的誤差曲線。經過10 s后兩種算法逐步收斂。在300 s 前KF-IMM2算法優于UKF-IMM3算法。到了320 s和410 s 附近,目標進行快速機動,KFIMM2算法的模型失配,導致均方根誤差有兩次大的躍升,其后精度一直差于UKF-IMM3算法;而UKFIMM3算法包含了處理機動的CT 模型,其均方根誤差在這兩個時間點沒有大的波動,整個跟蹤過程中誤差曲線基本光滑。
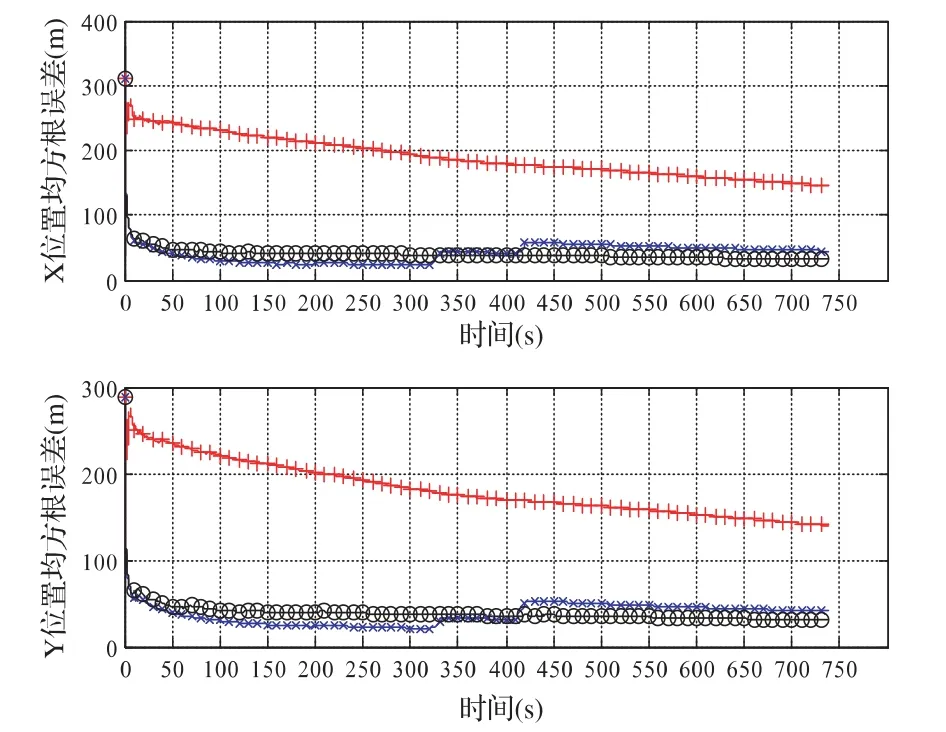
圖4 場景1 跟蹤的位置均方根誤差
圖5 是兩種算法對場景1 跟蹤的X和Y 速度均方根圖。其中叉號線是KF-IMM2 速度誤差曲線,圈號線是UKF-IMM3 速度誤差曲線。在10 s 鐘跟蹤之后,兩種算法逐步收斂。到了320 s和410 s 附近,KFIMM2算法的均方根誤差有兩次大幅度的躍升,同時UKF-IMM3算法的均方根誤差也發生躍升,但是躍升幅度小于KF-IMM2。整體而言,UKF-IMM3的速度均方誤差小于KF-IMM2的誤差。
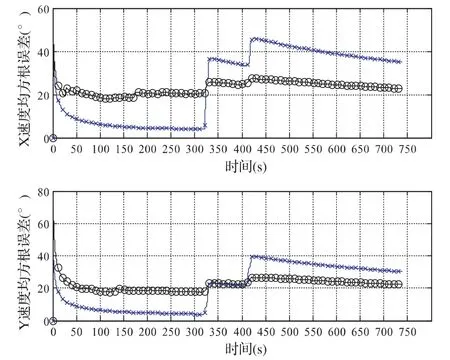
圖5 場景1 跟蹤的速度均方根誤差
表1 記錄了場景1中兩種算法跟蹤全過程的X、Y坐標位置反算回雷達極坐標系后計算得到的全局的距離均方根誤差和全局的方位均方根誤差。在直線飛行段,UKF-IMM3的距離和方位精度不如KF-IMM2;在機動飛行段,UKF-IMM3的精度則好于KF-IMM2。全局來看,UKF-IMM3 距離誤差是量測誤差的24.5%,方位誤差是量測誤差的20.0%;與KF-IMM2 相比,距離誤差減小了11.9%,方位誤差減小了33.3%。
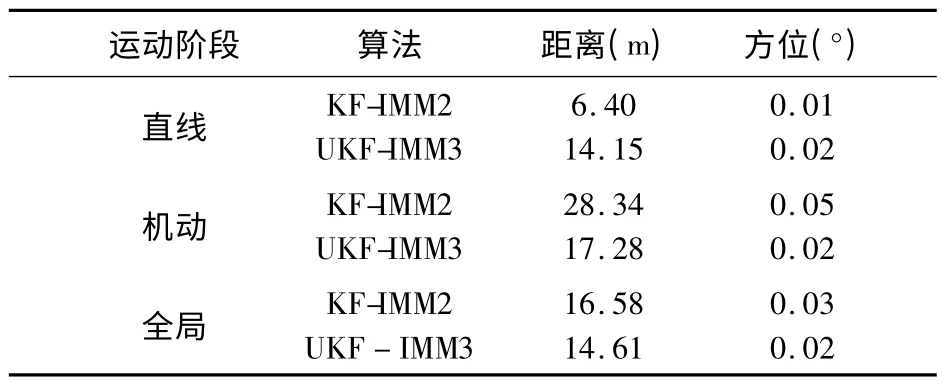
表1 場景1 跟蹤距離和方位的均方根誤差對比
3.2 實驗場景2
為了模擬實戰中敵方目標躲避我方雷達鎖定的戰術動作,仿真了目標高加速度多次機動的航跡:目標開始時從150 km 遠處向站飛行,直線飛行1 min后以9G加速度逆時針轉一個整圓,而后直線飛行1 min 再以9G 加速度順時針轉整圓,繼續重復如上運動2 次,最后向站飛行1 min。目標保持1260 km/h的恒定線速度。其中一次仿真加噪的航路如圖6所示。
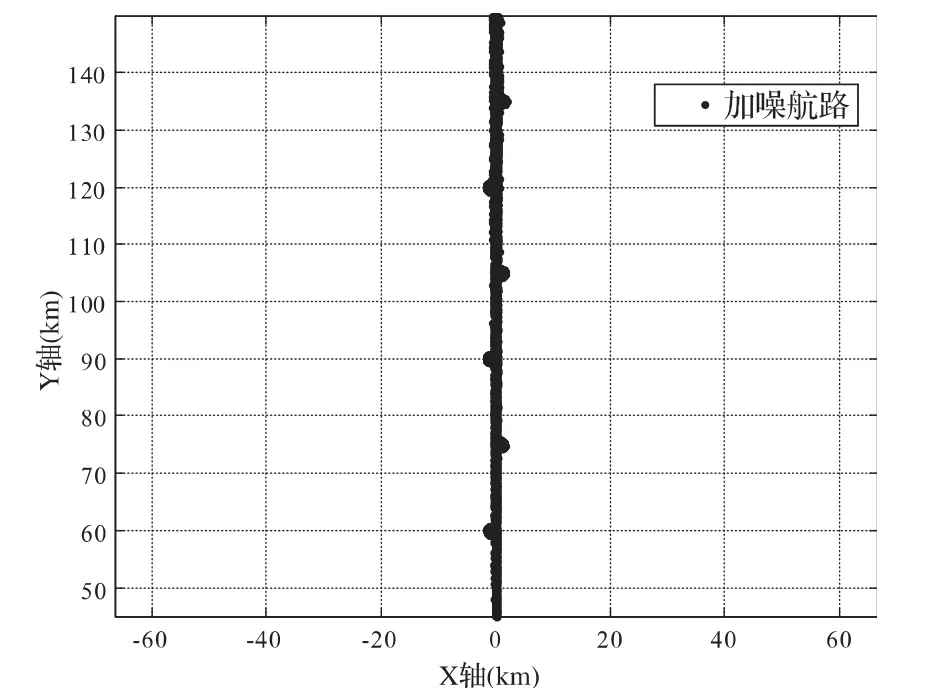
圖6 場景2 航路仿真圖
圖7 顯示了跟蹤場景2 航路時UKF-IMM3算法各模型的概率變化。在整個跟蹤過程中,CT 模型的概率有6 次明顯超過CV和Singer 模型的概率之和,符合目標6 次機動的運動模式。
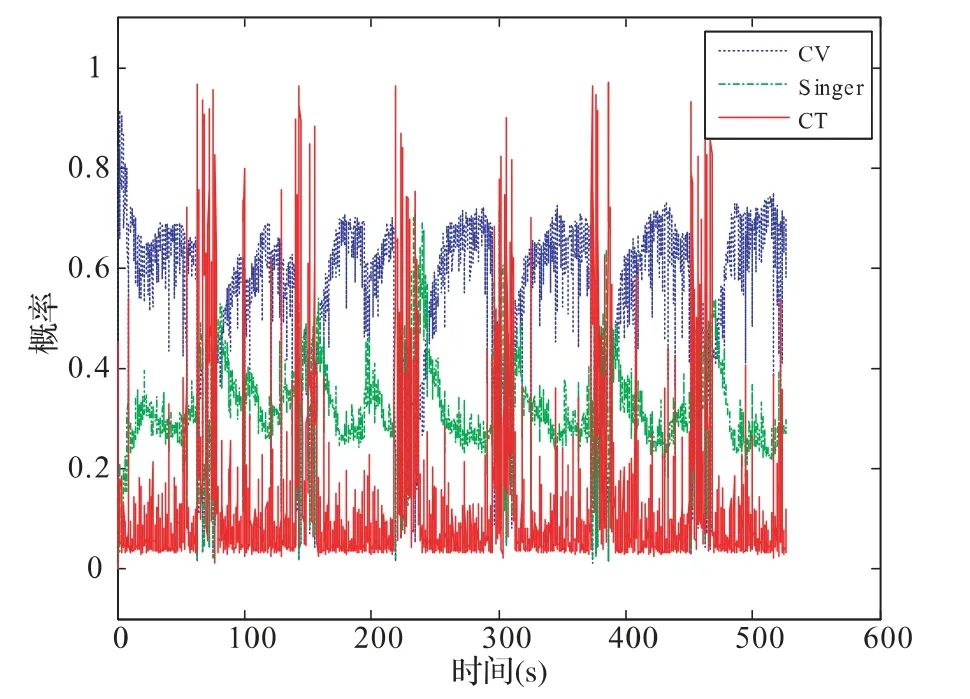
圖7 場景2 跟蹤UKF-IMM3 各模型的概率
圖8 是兩種算法對場景2 跟蹤的X和Y 位置均方根誤差圖。跟蹤10 s后兩種算法逐步收斂。在整個跟蹤過程中,KF-IMM2算法的均方根誤差有6 次明顯的躍升,對應目標進行機動時KF-IMM2的運動模型與實際運動模式失配;而UKF-IMM3 由于包含CT 模型可以光滑的處理目標機動過程。經過6 次機動,UKF-IMM3的位置均方根誤差明顯小于KF-IMM2的誤差。
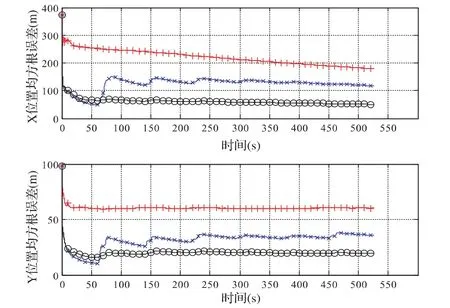
圖8 場景2 跟蹤的位置均方根誤差
圖9 是兩種算法對場景1 跟蹤的X和Y 速度均方根圖。在目標做6 次機動的時刻,KF-IMM2算法的速度誤差都有大幅躍升;在機動時刻UKF-IMM3算法的速度誤差也有增大,但是增大幅度小于KF-IMM2。從第1 次機動開始,KF-IMM2的X 坐標速度的誤差明顯大于UKF-IMM3,同樣的,KF-IMM2的Y 坐標速度的誤差也略大于UKF-IMM3。
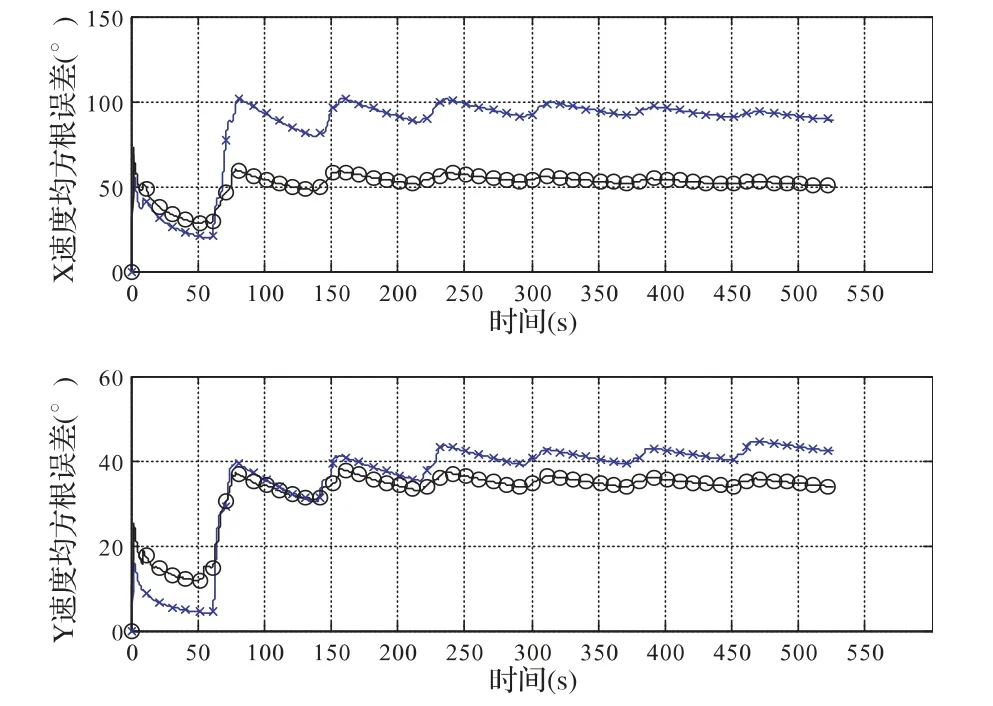
圖9 場景2 跟蹤的速度均方根誤差
表2 記錄了場景2中兩種算法跟蹤全過程的X,Y 坐標位置反算回雷達極坐標系后計算得到的全局的距離均方根誤差和全局的方位均方根誤差。在機動段,UKF-IMM3算法精度的提升非常明顯。全局上,UKF-IMM3 距離誤差是量測誤差的32.2%,方位誤差是量測誤差的20.0%;與KF-IMM2 相比,距離誤差減小了46.4%,方位誤差減小了66.7%。
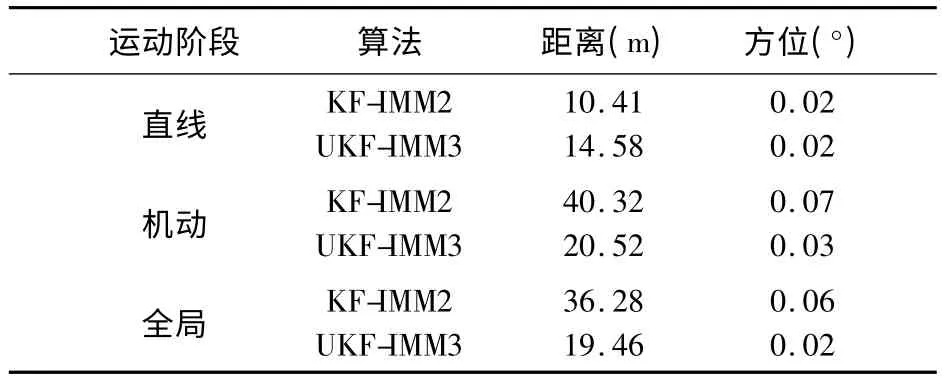
表2 場景2 跟蹤距離和方位的均方根誤差對比
實驗結果顯示,在高數據率跟蹤時UKF-IMM3 對目標快速機動的反應能力比KF-IMM2 更強。在目標作快速機動時,通過直線來擬合機動曲線的KF-IMM2算法對于每個機動轉彎都會產生較大的跟蹤誤差,出現的時機就在目標的距離變化率由正轉負或是由負轉正時;而使用UKF-IMM3算法使用的CV、Singer、CT 模型集則更好地擬合了目標的運動模式,特別是在目標執行多次快速機動時CT 模型的介入明顯減小跟蹤的誤差。
4 結束語
跟蹤制導雷達要求數據處理軟件能直接跟武器系統鉸鏈,直接引導武器系統去打擊目標,所以要求數據處理軟件跟蹤精度高,跟蹤延遲小,穩定度高。而跟蹤濾波正是影響制導雷達數據處理跟蹤精度的關鍵問題。本文提出一種使用未知角速度ω的CT 模型的交互多模型(UKF-IMM3)跟蹤方法,此方法具有如下優勢:
(1)采用交互多模型的結構,適合跟蹤目標機動/非機動飛行的全過程。
(2)針對現有的算法使用直線模型來擬合機動曲線,難以精確跟蹤目標快速機動的問題。UKF-IMM3通過加入未知角速度ω的CT 模型,更好的擬合缺乏先驗信息目標的運動模式,適合于防空系統對敵方目標直線段和機動段的全過程跟蹤。
(3)現有的跟蹤方法使用線性濾波器跟蹤會引入較大的線性誤差,而本文的方法通過使用不敏卡爾曼濾波具備更好跟蹤精度。
仿真實驗設計了兩個實驗場景,包含了目標執行蛇形規避和多次快速機動的仿真。與現有的以直線擬合機動的濾波算法相比,本文提出的方法顯著地提高了跟蹤精度,同時在目標轉入機動的時刻具有一定的識別能力和魯棒的跟蹤性能。今后的工作集中在對于UKF-IMM3算法速度跟蹤性能上的調優,以及算法向工程應用的轉化。
[1]黃槐,齊潤東,文樹梁.制導雷達技術[M].北京:電子工業出版社,2006.
[2]王小謨,張光義.雷達與探測——信息化戰爭的火眼金睛[M].2 版.北京:國防工業出版社,2008.
[3]何友,修建娟,張晶煒,等.雷達數據處理及應用[M].2 版.北京:電子工業出版社,2009.
[4]Li X R,Jilkov V P.Survey of Maneuvering Target Tracking Part I:Dynamic Models[J].IEEE Trans on Aerospace and Electronic Systems,2003,39(4):1333-1364.
[5]Duan Z S,Han C Z,Li X Rong.Comments on“unbiased converted measurements for tracking”.IEEE Trans.on Aerospace and Electronic Systems,2004,40(4):1374-1377.
[6]Li X R,Jilkov V P.Survey of Maneuvering Target Tracking Part V:Multiple-Model Methods[J ].IEEE Trans.on Aerospace and Electronic Systems,2005,41 (4):1255-1321.
[7]Julier S J,Uhlmann J K.Unscented Filtering and Nonlinear Estimation[J].Proc.of the IEEE,2004,92 (3):401-422.
[8]單奇,鈕俊清,李川.炮位偵校雷達的數據處理研究[J].雷達科學與技術,2010,8(2):171-176.
[9]鈕俊清,單奇,任清安,等.跟蹤彈道導彈全階段的可變多模型方法[J].雷達科學與技術,2011,9(3):224-231.
[10]韓崇昭,朱洪艷,段戰勝,等.多源信息融合[M].2 版.北京:清華大學出版社,2010.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
