
Trimble全站儀在動態(tài)測磁工程中的應(yīng)用
2013-06-08 06:24:40李金祿張連嵩鄭永良喻洲
船電技術(shù) 2013年6期
李金祿 ,張連嵩,鄭永良,喻洲
(1.92330部隊(duì),青島 郵編266102;2.海軍工程大學(xué)電氣與信息工程學(xué)院,武漢 430033)
1 引言
動態(tài)測磁是指艦船與磁傳感器陣列相對運(yùn)動的情況下測量磁場。與傳統(tǒng)的靜態(tài)測磁相比,它能夠全方位地測量艦船磁場,檢測效率更高[1-2]。動態(tài)磁性檢測站能夠在艦船經(jīng)過測量區(qū)域時(shí)自動采集艦船磁場,同時(shí)為獲取測量點(diǎn)相對于艦船中心的位置信息,需要對艦船的運(yùn)動軌跡進(jìn)行實(shí)時(shí)定位。定位系統(tǒng)主要包括兩種,一種是GPS定位[3], 另一種是全站儀定位[4]。它有著GPS定位機(jī)不具備的一些優(yōu)點(diǎn),如不需要衛(wèi)星信號,可以在比較封閉的環(huán)境下測量,價(jià)格相對較低,觀測數(shù)據(jù)直觀,數(shù)據(jù)處理簡單,操作方便等。因?yàn)樵谀承┐判詸z測站中GPS定位系統(tǒng)無法接受到衛(wèi)星信號,因此采用全站儀定位系統(tǒng)。全站儀,即全站型電子速測儀(Electronic Total Station),是集水平角、垂直角、距離(斜距、平距)、高差測量功能于一體的測繪儀器系統(tǒng),是動態(tài)測磁工作站不可或缺的一部分。先將全站儀安裝在檢測站的某一固定位置,在艦船上安裝目標(biāo)棱鏡。當(dāng)艦船緩慢地通過磁場傳感器區(qū)域時(shí),全站儀記錄艦船運(yùn)動軌跡,再利用坐標(biāo)轉(zhuǎn)換,推算出艦船相對于傳感器的位置,實(shí)現(xiàn)艦船磁場的動態(tài)測量。
2 全站儀定位原理
動態(tài)檢測站采用美國Trimble(天寶)公司的5600系列全站儀(見圖1),該類產(chǎn)品造型精巧,性能比較穩(wěn)定,精度高,操作簡單方便,電子化、智能化程度較高,能夠滿足現(xiàn)場測量的要求,而且能夠適應(yīng)惡劣的工作環(huán)境,耐極端溫度。但由于天寶產(chǎn)品有配套的應(yīng)用軟件,其通信指令有限對外公布,不允許用戶自行開發(fā)軟件,因此用戶難以根據(jù)自己需求擴(kuò)展其功能。
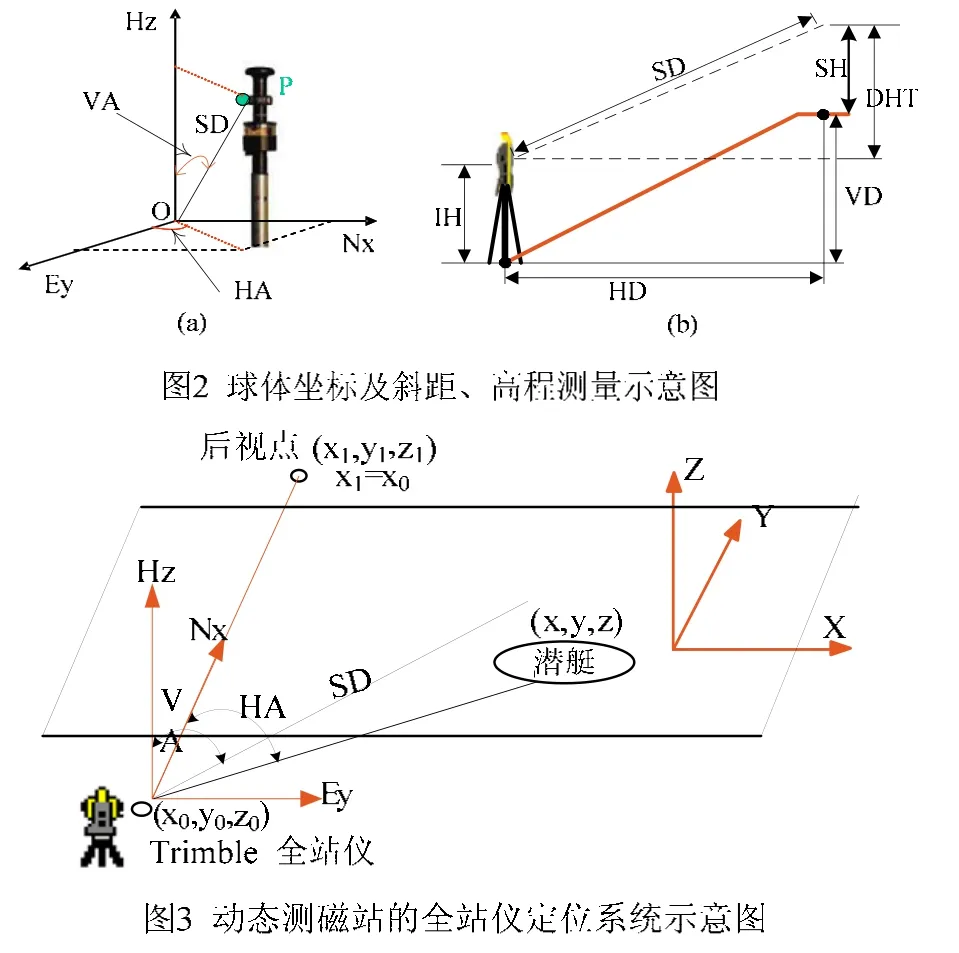
全站儀能自動地測量角度和距離,并能按一定程序和格式將測量數(shù)據(jù)傳送給相應(yīng)的數(shù)據(jù)采集器。全站儀自動化程度高,功能多,精度好,通過配置適當(dāng)?shù)慕涌冢墒挂巴獠杉臏y量數(shù)據(jù)直接進(jìn)入計(jì)算機(jī)進(jìn)行數(shù)據(jù)處理或進(jìn)入自動化繪圖系統(tǒng)。與傳統(tǒng)的方法相比,省去了大量的中間人工操作環(huán)節(jié),使勞動效率和經(jīng)濟(jì)效益明顯提高,同時(shí)也避免了人工操作,記錄等過程中差錯(cuò)率較高的缺陷。當(dāng)光波從起點(diǎn)出發(fā)經(jīng)棱鏡反射回到起點(diǎn)時(shí),會因往返時(shí)間差引起相位差。一般全站儀就是利用測相電路直接測定相位差來測算距離SD。全站儀還可以直接測出目標(biāo)點(diǎn)的水平角HA垂直角VA和高程DHT,從而測得的數(shù)據(jù)是一組完整的三維球體坐標(biāo),通過坐標(biāo)變換還可以轉(zhuǎn)化為直角坐標(biāo)系下坐標(biāo),參考圖2(a)。圖2(b)中的IH為主機(jī)儀器高,SH為棱鏡高,HD為水平距離。為了保證測量的精度,在進(jìn)行測量數(shù)據(jù)處理時(shí)需要考慮全站儀和棱鏡的儀器高度,測量點(diǎn)的實(shí)際高程為[5]:

3 坐標(biāo)變換
本定位系統(tǒng)采用天寶系列TS5600全站儀進(jìn)行艦船定位。該全站儀具備自動跟蹤功能,在手動鎖定目標(biāo)棱鏡(臨時(shí)安裝在艦船上的3600反光棱鏡)后,能自動跟蹤并鎖定運(yùn)動的艦船,通過相關(guān)軟件就可以采集、輸出、處理其坐標(biāo)信息。
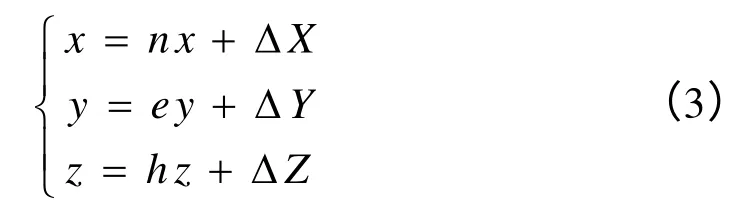
第一次進(jìn)行定位測量時(shí),為了測得在一個(gè)坐標(biāo)系下的絕對坐標(biāo),必須確定一個(gè)正確的方位,從而可以確定以全站儀為原點(diǎn)的相對坐標(biāo)系,即建站。全站儀以主機(jī)為坐標(biāo)原點(diǎn),以選定的參考棱鏡為后視點(diǎn),該定位儀方位與后視點(diǎn)的連線水平方向?yàn)槿緝x坐標(biāo)的北方向,即Nx方向,如圖3所示。
首先將全站儀測得的是球面坐標(biāo)轉(zhuǎn)換為直角坐標(biāo)(nx,ey,hz)。

根據(jù)圖3,測得的艦船位置信息是全站儀坐標(biāo)系下的相對坐標(biāo),為了確定磁傳感器和艦船的相對位置,我們需要的是艦船在整個(gè)測磁區(qū)域坐標(biāo)系下的絕對坐標(biāo),因此需要進(jìn)行坐標(biāo)變換。
依據(jù)圖4中的坐標(biāo)變換示意圖(a),當(dāng)Nx方向與絕對坐標(biāo)系下的Y軸不平行時(shí),涉及到坐標(biāo)的旋轉(zhuǎn),因此在選擇全站儀后視點(diǎn)時(shí)應(yīng)盡量與Y方向一致。當(dāng)因場地條件限制難以實(shí)現(xiàn)時(shí),可以設(shè)置水平偏置角。假設(shè)全站儀測得目標(biāo)的坐標(biāo)為(nx,ey,hz),全站儀在絕對坐標(biāo)系下的坐標(biāo)為(x0,y0,z0),如圖4(b),即x0=△X,y0=△Y,z0=△Z,那么目標(biāo)在絕對坐標(biāo)系下的坐標(biāo)為:

上述坐標(biāo)變換可以用計(jì)算機(jī)程序?qū)崿F(xiàn),運(yùn)行時(shí)無需操作,利用參考點(diǎn)或樣點(diǎn)坐標(biāo)驗(yàn)證坐標(biāo)轉(zhuǎn)換是否正確。注意到艦船在測磁區(qū)域主要進(jìn)行的是X軸方向運(yùn)動,因此可以考慮只測量艦船與全站儀的水平距離HD,這樣可以將三維球體坐標(biāo)簡化為平面直角坐標(biāo),定位更加簡潔方便。再根據(jù)全站儀和磁傳感器在絕對坐標(biāo)系下的位置,實(shí)時(shí)確定測量點(diǎn)與艦船的相對位置。但是這就要求艦船沿直線航行,否則會造成較大誤差。
4 數(shù)據(jù)通訊技術(shù)
在建立一個(gè)自動監(jiān)測系統(tǒng)時(shí),一個(gè)關(guān)鍵技術(shù)就是如何用計(jì)算機(jī)遠(yuǎn)程控制全站儀的操作以及如何從全站儀中取得觀測數(shù)據(jù),即計(jì)算機(jī)和全站儀的數(shù)據(jù)通訊技術(shù)。由于從全站儀的鍵盤建站和輸入點(diǎn)坐標(biāo)較為麻煩,所以通過計(jì)算機(jī)來采集、處理數(shù)據(jù)可以大大提高測量速度和后期處理速度,減少失誤概率,保證實(shí)時(shí)性。目前全站儀都是通過串口同計(jì)算機(jī)進(jìn)行數(shù)據(jù)通信,本文應(yīng)用Visual Basic語言設(shè)計(jì)程序,采用MSComm控件編寫通信程序。通過該控件可完成計(jì)算機(jī)向全站儀發(fā)出指令和接受全站儀的狀態(tài)和測量結(jié)果信號[5-7]。MSComm控件是利用串行通訊端口的屬性來實(shí)現(xiàn)硬件控制的,它有很多屬性,程序中涉及的主要有以幾個(gè)[6-8]:
Commport:設(shè)置串行端口號,類型為Short,一般設(shè)置為1,即使用COM1端口。Settings:設(shè)置串行口通訊參數(shù),包括通訊的比特率、奇偶校驗(yàn)、數(shù)據(jù)長度和停止位等。天寶全站儀的通訊參數(shù)為“9600,N,8,1”,表示串口比特率是9600bit/s,不作奇偶校驗(yàn),8位數(shù)據(jù)位,1個(gè)停止位。Portopen:設(shè)置串口狀態(tài),值為True時(shí)打開串口,值為False時(shí)關(guān)閉串口。Input:返還并刪除接受緩沖區(qū)中數(shù)據(jù)流。Output:向傳輸緩沖區(qū)寫一個(gè)字符串。InBufferCount:返回接受緩沖區(qū)中等待的字符數(shù)。Inputlength:返回或設(shè)置接收緩沖區(qū)內(nèi)用。Input命令寫入的字節(jié)個(gè)數(shù),取0值時(shí)表示Input命令寫入整個(gè)緩沖區(qū)的內(nèi)容。
天寶全站儀采用的是Geo/L語言。Geo/L語言是為了在Geodimeter CU系統(tǒng)各設(shè)備間進(jìn)行通訊而發(fā)展起來的一門語言,基本的數(shù)據(jù)結(jié)構(gòu)是數(shù)據(jù)由標(biāo)號標(biāo)定,即:
在此基礎(chǔ)上加上命令和變量以使數(shù)據(jù)有來源去向,命令為:
[(LF)]
所有的指令以回車換行結(jié)束,當(dāng)所有指令執(zhí)行完以后總是送出
測量方式設(shè)置: PG,3=
讀數(shù):RG[
其中變元arg為測量方式,0表示標(biāo)準(zhǔn)測量STD方式,1表示跟蹤測量TRK方式,2表示算術(shù)平均值D—bar方式。讀數(shù)指令就是從全站儀的控制單元讀取測量數(shù)據(jù)或者指定標(biāo)記的數(shù)據(jù)。arg指輸出方式,省略或?yàn)镾時(shí)表示標(biāo)準(zhǔn)輸出,為N時(shí)表示帶名稱輸出,為D時(shí)是數(shù)據(jù)輸出,為T時(shí)返回測試信號,有信號為301,無信號為300。其它命令還有很多,例如:
PV,20 :打開補(bǔ)償器;PV,21:關(guān)閉全站儀。
動態(tài)檢測站需要實(shí)時(shí)連續(xù)地測量數(shù)據(jù),因此程序采用Timer時(shí)鐘控件來實(shí)現(xiàn)測量事件的定時(shí)發(fā)生。天寶全站儀在跟蹤測量模式下最快測量時(shí)間是0.4 s,因此時(shí)鐘控件的Interval屬性設(shè)為400,即每400 ms內(nèi)讀取一個(gè)測量數(shù)據(jù)。考慮到實(shí)用性,還設(shè)計(jì)了錯(cuò)誤檢查程序,當(dāng)測量模式發(fā)生改變或出現(xiàn)通信線路故障、電源故障時(shí),及時(shí)提醒用戶。
為了更好的實(shí)現(xiàn)數(shù)據(jù)通信和交流電源供電,需要設(shè)計(jì)一套由供電模塊和數(shù)據(jù)轉(zhuǎn)換模塊組成的集成裝置。測磁站所使用的天寶全站儀都是由充電電池提供的12 V/ 4 A直流電源,充電耗時(shí)長,不耐用且易壞。設(shè)計(jì)的供電裝置主要由變壓器、整流器和保護(hù)電路組成。它接入電源為220 V的AC,整流變壓后提供全站儀和數(shù)據(jù)轉(zhuǎn)換模塊所需電源。

全站儀還提供RS232C串行通信接口,數(shù)據(jù)線和電源線集成到一個(gè)接口上,如圖5所示。根據(jù)RS232C標(biāo)準(zhǔn),各裝置之間線纜長度不應(yīng)超過15 m,傳送距離不夠遠(yuǎn),難以滿足工業(yè)控制的要求,需要將數(shù)據(jù)轉(zhuǎn)換為RS422A/RS485模式[9]。串行通信數(shù)據(jù)轉(zhuǎn)換模塊主要由ADAM模塊構(gòu)成。當(dāng)計(jì)算機(jī)向全站儀發(fā)出指令時(shí),該控制命令由ADAM模塊將RS232串行通信數(shù)據(jù)變?yōu)镽S422通信數(shù)據(jù),再將數(shù)據(jù)轉(zhuǎn)換回RS232格式傳送給全站儀。全站儀收到命令后,對某一已知距離進(jìn)行測量,并將數(shù)據(jù)通過ADAM模塊轉(zhuǎn)換后傳給計(jì)算機(jī),實(shí)現(xiàn)長距離通訊。
5 結(jié)束語
動態(tài)檢測站是艦船磁場測量的主要發(fā)展方向之一,通過定位系統(tǒng)和測磁系統(tǒng)就可以準(zhǔn)確、快速地對艦船進(jìn)行磁性定位和測量,因此對全站儀的應(yīng)用研究顯得尤為重要。全站儀作為定位系統(tǒng)的主要設(shè)備,其操作簡單,測量方便、準(zhǔn)確,時(shí)效性好,在測磁站中得到廣泛應(yīng)用。通過全站儀動態(tài)獲取艦船在測磁區(qū)的位置,經(jīng)過坐標(biāo)轉(zhuǎn)換推算出磁場傳感器相對于艦船的位置信息。這樣就可以很方便對艦艇進(jìn)行磁性分析,以判斷是否需要對其進(jìn)行消磁處理。用軟件實(shí)現(xiàn)計(jì)算機(jī)與全站儀的數(shù)據(jù)通訊,便于消磁工作者實(shí)時(shí)控制定位系統(tǒng)和測量數(shù)據(jù)處理,極大地提高了動態(tài)測磁的工作效率。
[1] 隗燕琳. 艦船近場動態(tài)磁場測量中的磁性定位方法研究[D]. 武漢: 海軍工程大學(xué), 2009.
[2] 劉大明.艦船磁場測量[M]. 武漢: 海軍工程大學(xué),1993.
[3] 謝愉, 楊培霞. 船用GPS技術(shù)應(yīng)用研究[J]. 航空電子技術(shù), 1995, (1): 20-25.
[4] 黃振杰, 張遠(yuǎn)智. 全站儀發(fā)展的現(xiàn)狀及前景[J].北京測繪, 1997, (2): 31-33.
[5] 韓志國. 計(jì)算機(jī)和全站儀數(shù)據(jù)通訊技術(shù)探討[J].軟件導(dǎo)刊, 2008, 7(3): 157-159.
[6] 付海波, 曹紅杰. VB環(huán)境下計(jì)算機(jī)與全站儀的數(shù)據(jù)通訊方法[J]. 北京測繪, 2000, (4): 29-31.
[7] 劉興權(quán), 梁艷平, 肖紅. 計(jì)算機(jī)和全站儀通訊的關(guān)鍵技術(shù)[J]. 四川測繪, 1999, 23(3): 121-122.
[8] Geodimeter CU User Guide Part 1[M/OL].http://www.trimble.com,2005-06.
[9] 潘新民, 王燕芳. 微型計(jì)算機(jī)控制技術(shù)實(shí)用教程[M].北京: 電子工業(yè)出版社, 2008: 145-153.
猜你喜歡
小學(xué)科學(xué)(學(xué)生版)(2021年7期)2021-07-28 06:44:42
北京測繪(2020年12期)2020-12-29 01:37:18
科技傳播(2019年22期)2020-01-14 03:06:34
中學(xué)生數(shù)理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(shè)(2019年3期)2019-10-10 01:40:18
中學(xué)生數(shù)理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
消費(fèi)導(dǎo)刊(2017年20期)2018-01-03 06:26:40
電測與儀表(2016年9期)2016-04-12 00:29:52
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
