一種斜推式爬墻機器人的分析與設計*
2013-06-09 12:34:00韓奉林劉曼玉張瑞強
機械研究與應用 2013年5期
關鍵詞:支架
徐 聰,韓奉林,劉曼玉,張瑞強,陳 帥
(中南大學機電工程學院,湖南長沙 410012)
一種斜推式爬墻機器人的分析與設計*
徐 聰,韓奉林,劉曼玉,張瑞強,陳 帥
(中南大學機電工程學院,湖南長沙 410012)
為解決爬墻機器人載重小、效率低等問題,提出了一種利用涵道風扇的斜推力使機器人吸附在墻面的爬墻原理,并制作了一款樣機驗證原理的可行性。這種爬墻機器人的風扇推力與墻面之間有一個夾角,將推力分解成沿墻面豎直向上的分力和垂直于墻面的附著力。機器人依靠風扇向上的分力和因附著力產生的摩擦力的合力而停附在墻面。通過實驗,機器人停附在墻面上所需推力小于自身重力,推力的利用率高。
爬墻機器人;涵道風扇;斜推力;吸附
1 引言
隨著人類的建筑物高度不刷新,高層建筑的各種問題隨之而來,高層建筑的維護、救援成了一個棘手問題[1-2]。除了建筑方面,在諸如造船、石油化工等工業領域[3-4],高空極限作業也成了不可避免的工作。正是在這種背景下爬墻機器人應運而生。
現有的爬墻機器人大部分依靠吸盤吸附方式[5],對墻面要求高,大部分依靠步行前進[6],行進速度緩慢,實際應用不理想。還有一種依靠噴氣正壓力使機器人與墻面間產生摩擦力從而停留在墻面的原理。這種爬墻機器人雖可利用目前非常成熟的大功率噴氣類發動機,但是大部分物體間的摩擦系數都在0.3~0.8之間[7],機器人停留在墻面的推力是機器人自身重力的2倍左右,顯然比較困難。因此在實際應用中,這種機器人一般通過絞盤纜線懸掛,風扇所提供的僅是貼附力,實際應用存在諸多不便[8]。
筆者所討論的爬墻機器人是一種基于筆者所提出的斜壓式新型爬墻原理,機器人依靠風扇向上的分力和因附著力產生的摩擦力的合力而停附在墻面。
2 斜推式爬墻機器人原理
斜推式爬墻機器人主要由底盤和旋動噴氣裝置組成,能在任意角度的平面內360°行駛、轉向以及懸停。通過增加相關附件,可以在墻面、棚頂等極限環境進行清洗、檢查等工作。
機器人的升力由風扇產生,風扇與車體之間有一夾角,推力被分解成沿墻面豎直向上的分力和垂直于墻面的附著力,見圖1(a)所示。機器人的總升力為風扇向上的分力和因附著力產生的摩擦力之和。要保證風扇的推力在一定范圍之內以免機器人發生滑動。在墻面上時,機器人的重力與風扇推力會產生一個扭轉力矩,因此需合理的設計機器人結構才能保證機器人不發生傾覆。機器人在墻面轉向行駛時,必須要保持風扇的推力方向始終向上,通過合理設計,依靠風扇和電池的自重力,很巧妙的實現了風扇自重力豎直。
2.1 升力與附著力計算
為了便于計算,將機器人的受力狀態用一個在墻上受到一斜向上推力F作用的物體代替見圖1(b)所示。物體受到向上的合力為F升,當摩擦力方向向上時,F升與風扇和車體間夾角θ及輪胎和墻面間摩擦系數μ的關系為:

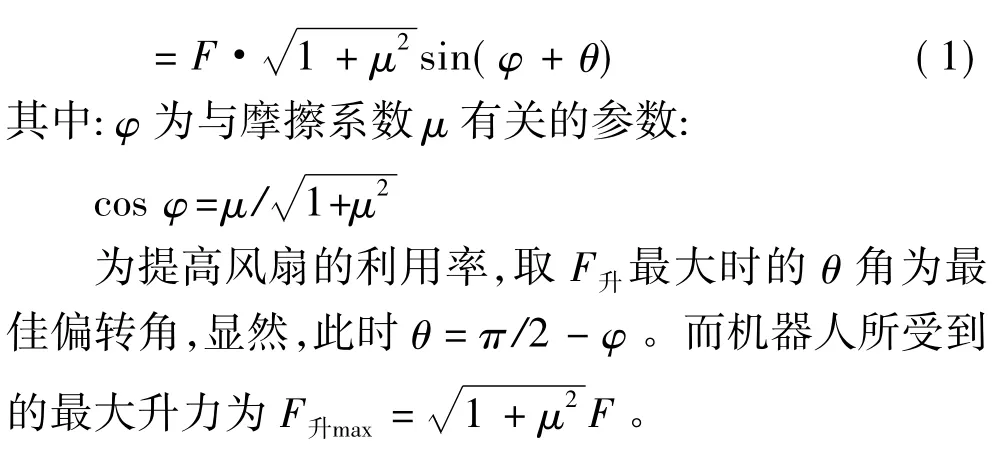
當θ為最佳偏轉角時,機器人的總升力F升是風扇推力F的倍,見圖1(b),所需最小推力比自身重力小。引言里所提到的采用正壓力吸附的爬墻機器人,則需自身重力1.5~3倍左右的推力。因此采用斜推方式,風扇推力的利用率被大大的提高了。
機器人的附著力大小為F附=F·cos θ,附著力在這里保證了機器人能很好的帖附于墻面,不能隨意滑動。同時,在機器人行進過程中,因貼附力所產生的摩擦力充當了機器人前進時的輪緣牽引力。
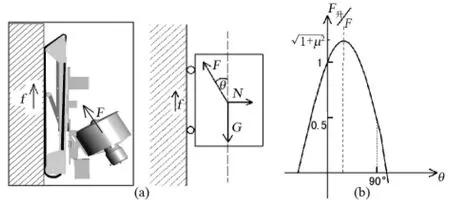
圖1 基本原理圖
2.2 抗滑移分析
為保證機器人在墻面的平穩運行,一定要防止車體在墻面上發生滑移,因此要保證風扇的推力在一定范圍之內,風扇推力過大輪胎與墻面之間將發生滑動摩擦,機器人將向上滑動,反之,當推力不足時將向下滑移[7]。
下面以保持風扇偏轉角最優(即θ=π/2-φ)時,計算風扇推力范圍。
(1)最小推力Fmin
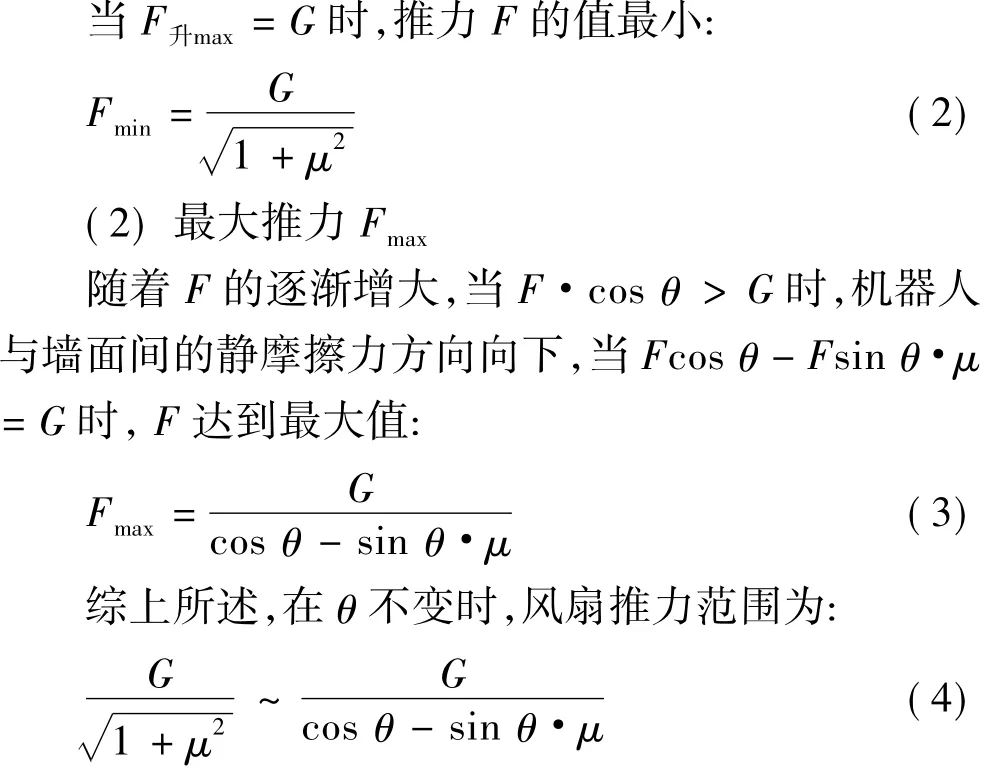
為對以上各式有更直觀的認識,取橡膠與粗糙水泥的摩擦系數μ=0.5[9]為輪胎與墻面之間的摩擦系數時,風扇在豎直平面最佳偏轉角θ=26.56°,機器人獲得升力F升為1.12F,附著力F附為0.45F,風扇推力范圍為0.89G~1.49G。
2.3 抗傾覆分析
斜推式爬墻機器人風扇推力和重心與車體平面不重疊,將會產生一個易使機器人傾覆的力矩,下面結合圖2分析機器人在墻面上的受力情況:
(忽略輪胎摩擦力矩的影響)

式中:H、h分別為風扇作用點及重心距離車體表面高度;L為前后輪軸距;l為風扇距后輪軸距離。
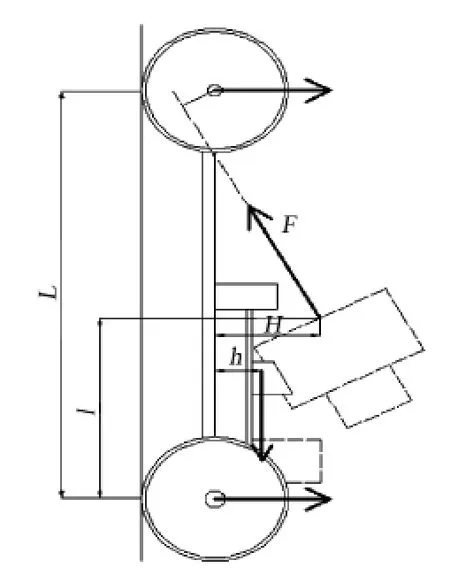
圖2 受力分析
當機器人軸距L和l滿足上述關系時,機器人前后輪與墻面壓力相同,車體不會發生傾覆趨勢。
由上式可以發現,車體傾覆發生的原因主要與軸距L和l大小有關,既與風扇的位置有關。
2.4 風扇自重力豎直原理
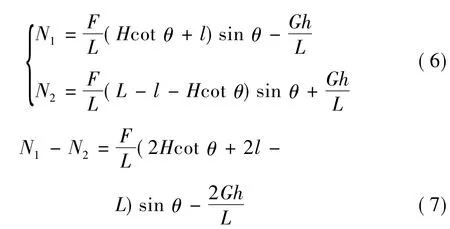
機器人在墻上轉向時,為確保機器人在車體發生偏轉時仍然能夠安全的貼附于墻面,須始終保證風扇推力的方向不變,風扇不能隨車體底盤一起偏轉。其中一種方案是設計一個可繞底盤中心軸自由旋轉的支架,并將風扇和電池置于支架后方,使其重心遠離旋轉中心(見圖3)。如果不考慮風扇推力影響,支架整體會像一個重力擺一樣永遠保證豎直。考慮到風扇有遠大于支架本身重力的推力,因此做以下分析。
風扇有向上推力,其作用方向指向旋轉中心O (見圖3),當車體偏轉時,假設支架中心線與豎直方向有一偏角δ,此時重力P的方向已不再指向旋轉中心O,P將產生一個回復力矩M,滿足以下關系:

式中:P、k分別為支架、電池、風扇總重量及其重心與旋轉軸之間的距離;Mf為風扇因裝配誤差產生的推力偏心力矩及旋轉軸摩擦力矩之和,是個很小的值。由于Pk比Mf大很多,因此支架偏轉角δ非常小,無論車體如何偏轉,支架與豎直平面的夾角始終控制在這個很小的偏轉角內,風扇推力的方向沒有受到明顯影響。
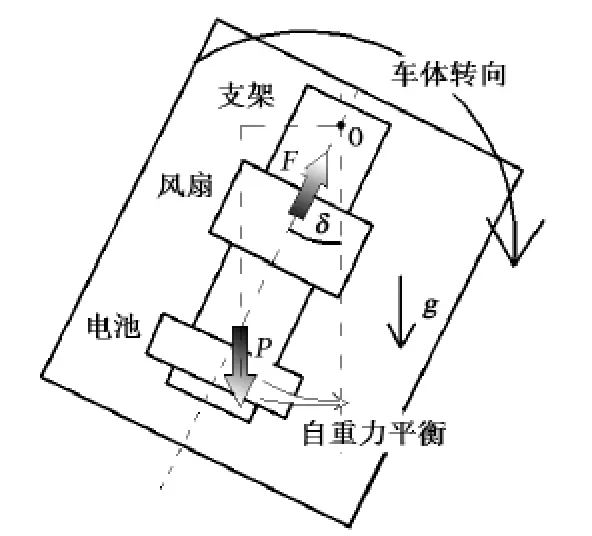
圖3 風扇自重力豎直原理
3 新型爬墻機器人結構
3.1 基本結構
爬墻機器人主要由底盤和旋動噴氣裝置兩部分組成見圖4。底盤是保證機器人在壁面運行的裝置,旋動噴氣裝置則保證了機器人穩定地帖附在墻面上。下面對底盤和旋動噴氣裝置進行介紹。
圖4 機器人結構
底盤包括動力、傳動、推進、轉向、控制等部分。由直流電機通過帶有自鎖功能的蝸輪蝸桿減速器驅動。減速器的自鎖功能保證了車體在墻面靜止工作時可以穩定的帖附于墻面上,不能產生滑動。機器人的推進方式可為兩種:輪式推進和履帶推進。采用輪式推進,結構簡單、行駛方便、快捷。采用履帶推進可以增強機器人的越障能力和附著力,適合應用在更惡劣的環境。
旋動噴氣裝置以一支架為主體,集中安裝有風扇、電池等部件。風扇可以在支架上俯仰偏轉從而使其適應不同角度的平面。支架通過可自由旋轉的軸與底盤相連,風扇和電池安裝在支架后方,當車體在墻面上轉向時,支架依靠重力可以實現自動豎直,保證了風扇的推力始終向上。
3.2 結構設計
(1)總體設計要求
設計流程如圖5所示。確定機器人設計要求:空重≤500 g,載重≥50 g,總尺寸不大于300×250,控制距離≥50 m,續航時間≥10 min。
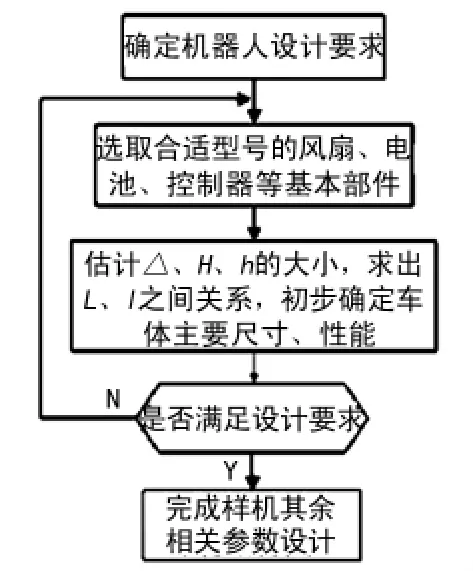
圖5 設計流程圖
(2)確定相關參數
如在式(4)中,取橡膠與粗糙水泥的摩擦系數取μ=0.5,根據式(1)風扇偏轉角θ=26.56°,取標準推力F=1.2G。H由風扇半徑R和支架高度Δ確定:

根據設計要求,選取64涵道式風扇,標配2 200 mAh電池和2 000 kV的電機,風扇標準推力為700 g,半徑為32。旋轉支架高度Δ在5~10,所以H= 35。h=H/3≈12h由車體、電池、風扇之間的重量和位置關系決定,通過估計計算得:
由以上相關參數,結合式(7)得:

當N1-N2=0前后輪對墻面壓力相等,車體受力平衡,此時L與l的關系為:

根據風扇、電機和電池尺寸,l的范圍為:

式中:風扇寬度M=25,電池寬度b=15,所以l>35。
依據設計要求總體尺寸在250×200之內,所以選取l=35,此時軸距L=165。
為確保車體在墻面任何方向上自由行使時均不發生傾覆,我們取輪距B=L,則B=165。最終確定車體主要參數如表1所列。

表1 斜推式爬墻機器人主要尺寸
4 樣機驗證
為了驗證這種斜推式爬墻原理的可行性,最終利用專業航空模型上使用的風扇、電池、控制器等部件,制作出原理驗證實物。
采用實地實物的測試方法對機器人的基本情況進行測試。在沒有更新電源的情況下,機器人分別在一塊墻面和一塊平整的石頭上進行了行駛、轉向、靜止共計2'30″的測試(見圖6)。在測試中,機器人運行正常,沒有出現滑動、傾覆現象,吸附性能良好。

圖6 實物演示
實驗結果表明:該機器人只需依靠自身攜帶的電池,便能很好地吸附在墻壁甚至石頭上,能實現平面內360°行駛。斜推式爬墻機器人在墻面適應性、運行速度、可靠性方面具有很大優勢,達到了初步的設計目的。
實驗過程中也發現了一些不足之處,首先是風扇的震動比較強烈,噪聲較大。其次是由于風扇轉動時會有一個逆向力矩給車體,造成了機器人兩側履帶與墻面之間的抓地力不同,使機器人在轉向時受到影響。在后續的工作中將在這兩方面進行改進。
5 結語
利用風扇斜推力使機器人停留在墻面,在爬墻類機器人的研究中這是一種新的嘗試。它對墻體表面沒有特殊要求,對風扇推力利用率又較高,可以采用快速的輪式或履帶推進方式,具有一定越障能力,適用性較強。另外還可以廣泛采用航空領域成熟的技術,利于將這種爬墻機器人推向一個廣闊的發展應用平臺[10]。
[1] 江 勵,管貽生,蔡傳武,等.仿生攀爬機器人的步態分析[J].機械工程學報,2010(10):18-22.
[2] 劉明芹,戴永雄,黃文攀,等.小型吸附式爬壁機器人機械結構及平衡性[J].機械設計及制造,2011(5):146-148.
[3] 王園宇,武利生,李元宗.壁面清洗機器人發展趨勢淺析[J].引進與咨詢,2002(4):3-4.
[4] Kim S A T.Asbeck M R.Cutkosky W R.Provancher SpinybotII: Climbing hard walls with compliant microspines[C].IEEE ICAR,Seattle,WA,2005:601-606.
[5] 潘裴林,韓秀琴,趙言正,等.日本吸附移動平臺的研究現狀[J].機器人,1994,16(6)379-382.
[6] Juan Carlos Grieco,Manuel Prieto,Manuel Armada,Pablo Gonzalez de Santos.A six-legged climbing robot for high payload[C].Proceedings of IEEE International Conference on Intelligent Robots and Systems,Trieste,WA,1992:446-450.
[7] 秦大同,謝里陽.現代機械設計手冊[M].北京:化學工業出版,2001.
[8] 史 強,李 露,邱自學.懸吊式高空消防機器人的設計及姿態控制原理[J].機械設計與制造,2013(1):162-164.
[9] 孫建林,蕭田國,黃立宇,等.橡膠輪胎與路面間摩擦模型及分析[J].青海大學學報,2004(4):2-5.
[10] 杜 輝,陳葆實,胡國榮,等.風扇/壓氣機氣動設計系統建設初探[J].航空動力學報,2007,22(3):453-459.
Analysis and Design of a Wall-climbing Robot Relying on Oblique Thrust
XU Cong,HAN Feng-lin,LIU Man-yu,ZANG Rui-qiang,CHEN Shuai
(College of Mechanical and Electrical Engineering,Central South University,Changsha Hunan 410012,China)
In order to improve the loading capacity and effciency of the wall-climbing robot,the theory about how to have the robot adsorbed on the wall by making use of the oblique thrust of the culvert fan is put forward.And the model machine is used to test and verify the feasibility of the theory.There is an included angle between the fan's thrust and wall space.So the thrust can be divided into two parts:the upward component force along the wall and the adhesive force perpendicular to the wall,and then the former one and the friction force caused by the latter one will be composed to make the robot on the wall.The conclusion can be reached by experiment research that when the thrust keeping the robot on the wall is less than its own gravity,the effect of the thrust is better.
wall-climbing robot;culvert fan;oblique thrust;adsorb
TP24
A
1007-4414(2013)05-0110-04
2013-08-13
徐 聰(1991-),男,遼寧鞍山人,在讀本科,研究方向:機械設計、創新設計。
猜你喜歡
保健醫苑(2022年5期)2022-06-10 07:46:12
小哥白尼(趣味科學)(2021年8期)2021-11-20 06:08:04
海洋信息技術與應用(2020年3期)2020-08-24 07:25:10
中國臨床醫學影像雜志(2019年5期)2019-08-27 02:48:00
中國生物醫學工程學報(2019年4期)2019-07-16 08:04:16
模具制造(2019年3期)2019-06-06 02:10:54
制造業自動化(2017年2期)2017-03-20 14:26:14
中國繼續醫學教育(2015年6期)2016-01-07 07:38:49
沈陽醫學院學報(2014年4期)2014-12-27 13:44:20
航天器工程(2014年5期)2014-03-11 16:35:55