自動操舵儀CAN智能節點的設計與實現
2013-06-12 06:54:12陳永冰孟云飛徐務農
船海工程
2013年2期
周 崗,陳永冰,孟云飛,徐務農
(1.海軍工程大學 電氣與信息工程學院,武漢430033;2.海軍902廠,上海200083)
傳統的自動操舵儀內部通信方式并不靈活,也不利于實現全船的網絡化。國內自動舵的研究側重于理論方面較多,很少針對性地解決工程實際應用中出現的問題,大部分自動舵成品通信線路復雜。因此本文對通信總線采用CAN總線進行設計。CAN總線能夠靈活地、實時地進行通信,為自動舵實現模塊化結構、易于擴展、實現全船網絡[1]化打下基礎。CAN總線工作于多主方式,構成的網絡節點之間的數據通信實時性強,提高系統的可靠性和靈活性,而RS-485構成主從結構系統,通信方式以主站輪詢的方式進行,系統的實時性差。本文重點分析自動舵信息傳遞的幾種形式,設計以C8051F500為核心的智能通信節點,將多種信號通過智能節點發送到CAN網上,實現CAN網絡節點通信以及數據共享。
1 系統基本工作原理及結構
1.1 自動舵的基本工作原理

圖1 系統工作原理
1.2 系統結構
傳統自動舵系統結構復雜,難于擴展,給檢修帶來了很多不便,采用CAN總線易于實現全船網絡互連、數據共享,具有很好的應用前景。其系統的基本結構見圖2。羅經、GPS、計程儀、VDR、顯示部件等設備節點掛接在總線上,將數據發送總線,需求信息的部件通過設置標識符讀取總線上信息,實現了數據共享。
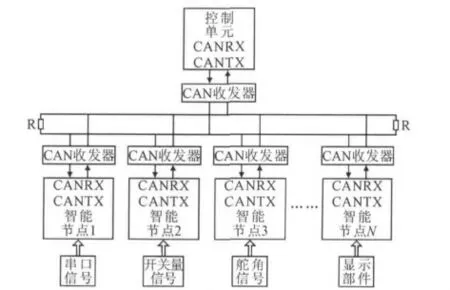
圖2 系統結構原理圖
在CAN總線終端并聯兩個電阻是為了實現阻抗匹配,保證驅動能力,且可以防止信號反射。CAN總線的引入,把船舶集中式控制系統向分散式系統進行轉化。……
登錄APP查看全文
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32