基于TMS320F2812的編碼器電子學(xué)設(shè)計與實現(xiàn)
2013-06-13 12:53:12李長春譚廣通
電子測試 2013年5期
李長春 譚廣通 李 霽
(91245部隊,遼寧葫蘆島 125001)
1 引言
編碼器系統(tǒng)又可稱為測角系統(tǒng),有光學(xué)度盤式、光電絕對式、光電增量式、電感式四種形式。我們應(yīng)用的是絕對式光電軸角編碼器。絕對式光電軸角編碼器是一種高分辨率數(shù)字式測角元件,它可以將軸的角度位置以一組特定的數(shù)字代碼實時輸出,其代碼只與軸的位置有關(guān),即使在斷電狀態(tài)下旋轉(zhuǎn)任意角度也不影響通電后所獲代碼的正確性。它由光學(xué)機械系統(tǒng)和電路系統(tǒng)組成。光學(xué)機械系統(tǒng)包括:機械主體、碼盤、光源、狹縫和光電接收器。碼盤采用矩陣式,空心軸,體積較小、結(jié)構(gòu)緊湊。電路系統(tǒng)包括:電源、光電信號放大電路、模數(shù)轉(zhuǎn)換電路、微處理器電路、接口電路、軟件等。新型編碼器電路采用TMS320F2812為核心,編碼器模擬信號的采集全部采用A/D轉(zhuǎn)換器,編碼器分辨力到24位,電路結(jié)構(gòu)簡單,可靠性高。
2 編碼器工作原理簡述
本文中編碼器采用矩陣式整裝結(jié)構(gòu),空心軸,體積小、結(jié)構(gòu)緊湊。其中碼盤直接安裝在軸頭上,整周有兩個精碼讀數(shù)頭和四個粗碼讀數(shù)頭,狹縫采用整盤一體化設(shè)計。其中兩個精碼讀數(shù)頭對徑放置,各自給出四路位相依次相差90°的信號,同名信號做對徑相加,可以消除由碼盤偏心帶來的誤差。1-12位由粗碼讀數(shù)頭讀出,四個粗碼讀數(shù)頭整周均布,1-12位碼制為距陣碼。
圖1為編碼器原理方框圖,由光源發(fā)出的光線射過碼盤和狹縫。當碼盤與狹縫產(chǎn)生相對運動時,將射過的光線切割成強弱變化的光信號,經(jīng)光電接收器轉(zhuǎn)換成電信號。這些電信號包含了轉(zhuǎn)動軸與不動基礎(chǔ)間的相對角度位移信息,這些信號分為精碼、中精碼、和粗碼信號等。
精碼信號經(jīng)差分放大、A/D變換器轉(zhuǎn)換成數(shù)字量信號,經(jīng)由微處理器細分。中精碼和粗碼直接進入A/D轉(zhuǎn)換器,單片機將其數(shù)字量解碼。計算機軟件按程序進行采樣、細分、譯碼、校正、對徑相加、平均處理,得到24位分辨率的角度代碼。以自然二進制碼形式由串行端口輸出。

圖1 編碼器原理方框圖
3 新型編碼器電子學(xué)設(shè)計方案
為克服傳統(tǒng)的電路處理方案存在的弊端,本文中設(shè)計具有小型化、智能化、簡單化的新型電路處理方案,電子學(xué)設(shè)計方案原理圖如圖2所示。
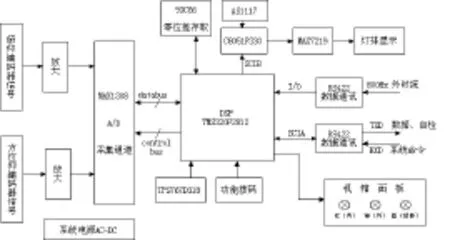
圖2 方案原理圖
該系統(tǒng)的技術(shù)特點如下:
3.1 高速數(shù)據(jù)處理平臺
(a)系統(tǒng)采用高速信號處理器TMS320F2812為處理內(nèi)核,保證了信號處理的實時性,編碼器數(shù)據(jù)處理時間約為50us;
(b)能夠進行大量的數(shù)據(jù)處理工作,如信號幅值的檢測,碼道的檢查,進位錯誤檢查等;
(c)能夠與PC機進行快速的數(shù)據(jù)交換。
3.2 編碼器自維護功能
(a)所有原始信號全部經(jīng)過A/D轉(zhuǎn)換,由軟件調(diào)整精碼信號的放大參數(shù)、幅值參數(shù),粗碼信號的鑒幅電平,實現(xiàn)信號的自動調(diào)整;
(b)便于日后的維護,方便用戶定期對編碼器進行自維護工作。
3.3 智能化的自檢方式
(a)編碼器工作過程中,能實時檢測編碼器進位的正確與否,發(fā)現(xiàn)錯誤能報警并通知主控計算機;
(b)主控計算機通過信道檢查指令能夠在線檢查編碼器各路信號是否滿足要求,如發(fā)現(xiàn)故障,能及時報警,并定位故障點,實現(xiàn)編碼器故障診斷的智能化;
(c)能夠監(jiān)測系統(tǒng)提供的外時統(tǒng)工作是否正常,出錯時能通知系統(tǒng) 故障狀態(tài)。
3.4 簡單的設(shè)計和操作方式
(a)電路設(shè)計簡單:去掉電位器調(diào)整及粗碼信號的比較鑒幅環(huán)節(jié),與傳統(tǒng)的處理電路相比,大約減少70%的分立元件,系統(tǒng)的集成度大大提高;
(b)主控計算機能夠通過命令實現(xiàn)對編碼器的置數(shù)、清零、信道檢查、故障偵測。
4 設(shè)計方案關(guān)鍵技術(shù)實現(xiàn)
4.1 全A/D化數(shù)據(jù)采集平臺的建立
該方案中,粗碼、精碼信號,放大后直接由TMS320F2812(DSP)控制高速A/D轉(zhuǎn)換器采集信號,對于保證精碼信號幅值的對稱性、粗碼信號的數(shù)字化都由軟件來控制完成,簡化了電路的設(shè)計,分立元件少了,系統(tǒng)的集成度提高了。另外所有信號的數(shù)據(jù)狀態(tài)全部采集并保存,便于對信號的檢測,檢查和計算。
高速的數(shù)據(jù)處理器TMS320F2812,速度可達150MIPS。A/D轉(zhuǎn)換器MAX1308八個通道的數(shù)據(jù)轉(zhuǎn)換完成時間為1.98μs。對于高低、方位兩個編碼器共需要40路A/D轉(zhuǎn)換器,實測采集數(shù)據(jù)的時間小于40μs,再加上數(shù)據(jù)處理的時間,總共系統(tǒng)數(shù)據(jù)穩(wěn)定時間小于50μs,滿足800Hz的采樣頻率。系統(tǒng)的快速響應(yīng)為大量的數(shù)據(jù)處理提供了良好的硬件支持。

圖3 全A/D化數(shù)據(jù)采集平臺
4.2 信號參數(shù)的自動計算與調(diào)節(jié)
對于粗碼信號,我們需要知道粗碼信號的最大值和最小值,以決定信號的鑒幅電平值,以保證粗碼信號數(shù)字化后占空比為1:1。如圖4所示。
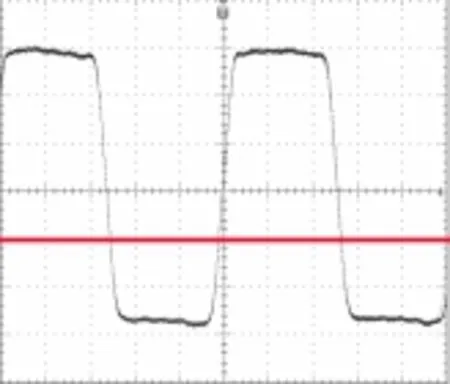
圖4 粗碼鑒幅電平
根據(jù)碼盤設(shè)計,通常我們?nèi)〈执a峰峰值的三分之一作為粗碼的鑒幅電平(如圖4中橫線的指示位置),若粗碼電平的最大值用Max表示,粗碼電平的最小值用Min表示,則粗碼鑒幅電平參數(shù)VS的計算公式如下:
對于精碼信號,它放大后接近于正弦曲線,要保證細分的正確性和精度,要求相位互差90°的兩路信號要完全正交。從編碼器輸出的精碼信號相位相差接近于90°,要保證電子學(xué)細分正交性的要求,就要求信號幅值一致,直流電平一致。由于信號沒有經(jīng)過電位器的調(diào)整,放大后各路精碼信號飛幅值和直流電平均不一致,因此,我們需要計算精碼信號的軟件放大倍數(shù)和直流電平兩個參數(shù),以便信號通過軟件放大器放大后達到正交性的要求。如圖5所示:
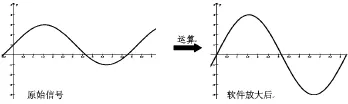
圖5 精碼信號軟件放大示意圖
若精碼信號電平的最大值用Max表示,最小值用Min,信號放大后信號的峰峰值用Vout表示,則精碼信號的軟件放大倍數(shù)Kamp和直流電平VR計算公式如下:

4.3 信道自動檢查
以往的編碼器出現(xiàn)錯碼時,需要通過燈排,查看編碼器錯誤的位置和大致的錯誤點,再通過示波器查看各路信號的幅值是否符合要求。不符合時,需要通過電位器調(diào)節(jié)或更換損壞的光電元器件,檢查過程麻煩、費時。
新方案的信道檢查功能,能快速的檢測各路信號是否滿足幅值要求,不滿足要求的能報警并通知系統(tǒng)具體的出錯位置。
對于粗碼信號,主要檢查是否有高低電平的變化。對于精碼信號可通過比較精碼信號的A/D量,判斷五種幅值標準是否滿足要求,這五種標準如圖6所示:
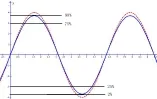
圖6 精碼信號幅值檢測標準
五種檢測項目要求如下:(a)、峰值幅值小于等于98%;(b)、峰值幅值大于等于75%;(c)、谷值幅值大于等于2%;(d)、谷值幅值小于等于25%;(e)、幅值誤差小于10%。
4.4 編碼連續(xù)性的實時性檢查
編碼正確是保證整個系統(tǒng)正常工作的基本功能,編碼正確更直接一點講,就是沒有跳碼。一旦有跳碼,伺服系統(tǒng)和其他系統(tǒng)都將失控,甚至整個系統(tǒng)癱瘓。
為此,編碼器信號處理系統(tǒng)加入了實時進位檢查功能,能夠?qū)崟r檢測編碼器編碼的正確與否,發(fā)現(xiàn)錯誤時,及時報警并通知上位機系統(tǒng),以便于上位機能夠及時采取措施,避免由于失控造成大的損失。

圖7 外推公式原理圖
如圖7所示:采用拋物線擬合算法,通過等時間采樣連續(xù)的三個位置點來推出未來位置點的位置,如果未來點的位置偏差在規(guī)定的誤差范圍內(nèi),就判定編碼連續(xù),否者報警同時通知上位機系統(tǒng),其外推公式為
5 結(jié)束語
編碼器模擬信號全部經(jīng)過A/D量化,有力于對信號的變化進行監(jiān)測,并配和TMS320F2812的高速處理速度可提高編碼器數(shù)據(jù)輸出的實時性,配合軟件的算法,可實現(xiàn)信號的故障診斷,信號的自動調(diào)節(jié)功能,提高了編碼器的智能化,另外處理電路簡單,系統(tǒng)的故障節(jié)點少,提高了編碼器的可靠性。
[1]尹勇,歐光軍,關(guān)榮鋒.DSP 集成開發(fā)環(huán)境CCS開發(fā)指南[M].北京:北京航空航天大學(xué)出版社,2003.
[2]王麗萍,蘇建,吳曉.基于DSP 的H.264 算法的優(yōu)化與實現(xiàn)[J].微計算機信息,2007(23):8-2.
[3]董莉莉, 熊經(jīng)武.光電軸角編碼器的發(fā)展動態(tài)[J].光學(xué)精密工程, 2000, 8(2): 198-202.
[4]趙柱, 續(xù)志軍, 王顯軍.基于運動控制技術(shù)的編碼器自動監(jiān)測系統(tǒng)[J].中國光學(xué)與應(yīng)用光學(xué), 2009,2(2):134-139.
[5]LU X D, TRUMPER D L.Self-calibration of onaxisrotary encoders[J].Annals of the CIRP, 2007,56(1):499-504.
[6]KAO CH F, LU M H.Optical encoder based on the fractional Talbot effect[J].Optics Communications, 2005,250: 16–23.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
鴨綠江(2021年35期)2021-04-19 12:24:18
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
