電路板故障診斷系統的快速控制原型方法研究
2013-06-13 12:53:16史宏亮劉春來
電子測試 2013年5期
史宏亮 張 東 劉春來
(北京自動測試技術研究所 100088)
1 引言
20世紀60年代以來,國內外學者已對模擬電路故障診斷提出了傳統故障診斷方法和現代故障診斷方法兩大類診斷辦法。傳統電路故障診斷通常利用電路原理分析及相應物理量的計算,通過電路對正弦信號、階躍信號、方波信號等典型信號的暫態響應或穩態響應的情況分析診斷可能存在的故障[1]。傳統模擬電路故障診斷方法主要有:故障字典法,元件參數辨識法,故障驗證法等;現代模擬電路故障診斷方法主要是模式識別法,不需要對電路原理進行分析,采用的技術包括神經網絡故障診斷法、專家系統故障診斷法、模糊故障診斷法、小波變換故障診斷法等[2]。
采用如神經網絡、模糊、小波變換等故障診斷方法,在MATLAB仿真環境中對其算法進行設計和研究是比較方便的,而從算法到實際代碼的生成還有一個中間過程,這個代碼如要開發人員自己編寫的話,其工作量是比較大的,首先要求開發者對算法自身的理解要有一定深度,那么在這一由理論到實際的過程中,近年來出現的一種叫做快速原型方法,是算法在仿真環境中進行快速驗證的很好解決方案。
快速原型(Rapid Control Prototyping,RCP),即控制系統的快速功能原型測試。是指在產品開發的初期,將工程師開發的算法下載到計算機硬件平臺中,通過實際I/O與被控對象實物連接,用實時仿真機來模擬控制器與實物相連進行實時仿真,檢測與實物相連時控制算法的性能,并在控制算法不理想的情況下可以進行快速反復設計以找到理想的控制方案;在確定控制方案后,通過代碼的自動生成及下載到硬件系統上,形成最終的控制器產品,并通過對這個功能原型裝置的實物實驗來檢驗和修改設計。快速原型仿真與半實物仿真(HILS)這兩方面應用的區別是:前者的仿真對象是控制器,實現了控制器的功能;而后者仿真對象是設備或環境,實現了某一設備或整個外環境的功能。快速原型系統真正使設計人員不必為研發各階段的功能檢測實驗環境而煩惱,減少設計過程中信息交流和共享中存在的困難,可以將精力更多集中在產品功能和品質的研究上,而不是枯燥的手工編碼工作上[3]。
2 MATLAB實時仿真環境
實時混合仿真平臺是結合 MATLAB 實時仿真機制RTW(Real-Time Workshop)工具箱,并在 RTWT (Real-Time Windows Target)工具箱提供的實時內核的支持下,實現的實時仿真。
RTW是MATLAB圖形建模、仿真和樣機開發環境Simulink的一個重要功能補充模塊,是基于Simulink的代碼自動生成環境。它能直接從Simulink的模型中產生優化的、可移植的和個性化的C代碼,并根據目標配置自動生成多種環境下的程序,在硬件上運行動態系統模型,同時還支持基于模型的調試。當用戶在Simulink環境下建模,并得到較滿意的仿真結果后,可利用RTW針對某種目標機來創建整個系統或是部分子系統可下載執行的C代碼, 并結合一個快速原型化目標(例如RTWT目標)與用戶的物理系統連接在一起,使用Simulink模型作為連接物理目標的接口,利用生成的代碼在實時環境中測試與驗證自己的設計。
RTWT是MATLAB 提供和發行的一個基于RTW體系框架的附加產品,它可將PC機轉變為一個實時系統,其目的是引入一種快速原型設計的方法,用于控制器的實時測試和開發[4]。在這個環境里,一臺PC機既作為宿主機,又作為目標機存在。RTWT應用一個實時內核來保證應用程序的實時運行,實時內核運行在CPU的最高優先級,利用PC的內部時鐘作為自己的時間信號源。由于目標應用程序被編譯為具有平面存儲模式(flat memory model)Windows NT應用程序,提供了完全的32位功能,無須在16位內存段與DOS擴展器間進行切換,因而執行效率高,具有相當快的運算速度,這樣就可以在較短的時間內計算仿真模型,從而可以滿足實時系統對時間的要求。對于較小的Simulink模型,其采樣頻率可以達到10KHz。
RTWT支持多種做作的驅動程序庫,從Simulink移植到外部硬件的參數可以在系統運動過程中進行在線調整,所以用其進行實時控制系統開發時,周期短、費用低、效率高。RTW和RTWT的關系以及工作原理如圖1所示。
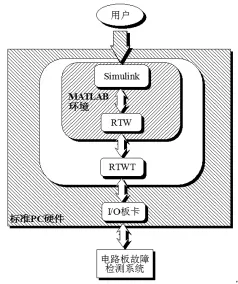
圖1 實時窗口目標工作原理框圖
系統中虛擬控制器部分由 MATLAB 結合 Simulink 工具箱實現,以Simulink模型作為連接物理目標的接口。Simulink的外部模式與 RTWT 結合提供了一個圖形用戶接口。.利用RTW將搭建好的Simulink模型自動轉換為C代碼并編譯成可Windows NT可執行程序,在底層運行,與RTWT通過對應的驅動程序連接,完成系統的實時采集和故障診斷工作。
3 PCB故障檢測系統硬件
PCB故障檢測系統主要包括主控IPC、測試儀器(硬件模塊構成)、系統軟件、測試連接裝置等部分。系統整體框圖如圖2所示。

圖2 功能測試系統硬結構框圖
PCB故障檢測系統的硬件平臺由主控計算機、測試儀器、通用測試接口連接裝置等部分構成。主控計算機完成測試控制、故障診斷、控制用戶界面、和數據顯示系統管理等任務。測試儀器通過測試總線與主控計算機連接,在主控計算機的控制下完成測試任務。通用測試接口連接裝置由通用接口電路、接口適配電路和連接裝置構成,通過信號轉接等將被測電路板的信號接入測試系統,必要時還需要對信號進行調理、變換。
在故障診斷算法設計和仿真驗證階段,則主要利用MATLAB的快速控制原型RCP方式來實現算法參數的不斷優化和調試,以達到更好的診斷效果。其中最主要用到的工具箱就是RTW和RTWT對象。
Simulink 提供了各種各樣的模塊集合,在 Simulink 提供的圖形用戶界面上,只要進行簡單拖拉操作,就可利用這些模塊集合構造出復雜的控制器模型。此外 Simulink 還提供了諸如模糊邏輯工具箱與神經網絡工具箱之類的高級算法控制工具箱,利用這些工具箱,結合其他模塊,可搭建出各種與之相關的故障診斷算法,如模糊診斷方法、神經網絡診斷等。利用工具箱的圖形用戶界面編輯控制器,可方便地設計故障診斷器的框圖式系統,這使系統的算法設計過程圖形化,更為簡單和直接。
4 RTWT的安裝與設置
(1)在Windows 2000下安裝RTW 5.0需要系統首先安裝MATLAB 6.5.1和Simulink 5.1,還要安裝RTWT需要的首先安裝Watcom C編譯器,并在定義Watcom環境變量,定義Watcom環境變量的方法是在autoexec.bat中加入如下設置:
set WATCOM=<編譯器安裝路徑>
重啟計算機后在MATLAB命令行窗口鍵入mex–setup,根據提示設置Watcom C編譯器為默認編譯器。
(2)在MATLAB命令行窗口鍵入rtwintgt–setup,對于“是否安裝RTWT內核”問題,鍵入Y;
(3)再次打開MATLAB,打開Simulink,并新建一模型文件,保存為PCBtest.mdl;
(4)在模型庫中找到Real-Time Windows Target,將Analog Output、Analog Input和Scope拖到新建的模型文件中;
(5)雙擊Analog Input,在彈出的窗口中點“Install new board”按鈕,找到所用采集卡的驅動程序,確認后,出現采集卡輸入端口調整窗口,可以調整和確認采集卡的地址和各通道的輸入電壓范圍;例如對于NI公司的板卡,驅動選擇過程如圖3所示。
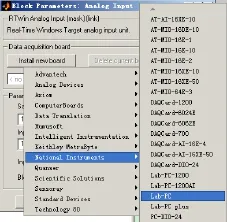
圖3 RTWT下NI板卡驅動安裝示例
(6)在PCBtest.mdl模型文件的菜單中選擇Simulation→Simulation Parameters→Solver→Solver options中Type對應的下拉框中選擇定步長(Fixed-step),定步長大小設置為0.001,模式選擇為單任務(Single Tasking);
(7)Tools→RTW Options中系統目標文件,利用瀏覽(Browse)按鈕選擇實時視窗目標所對應的rtwin.tlc;
(8)按下Tools→RTW Build按鈕,進行代碼生成和目標文件的創建;
(9)在Simulation菜單選擇External;
(10)在Simulation菜單下,確認Connect to target選項;
(11)在Simulation菜單下,單擊Start real-time code。即開始快速控制原型法對系統進行測試。
5 總結
本文提出一種將快速控制原型應用到PCB故障診斷系統中的方法,利用實時視窗目標(RTWT)可方便完成診斷算法的驗證。確定好相應的診斷策略后,還可利用RTW自動生成代碼,將控制器對應的代碼嵌入到用C/C++編寫的故障診斷軟件中,進而完成快速原形化控制和設計到代碼的自動化。
[1]萬喜新.基于信息融合技術的模擬電路故障診斷方法研究[D].湖南大學,2006.
[2]王啟寧,李永紅.基于人工智能算法的印刷電路板測試與診斷系統研究[J].山西電子技術,2011,(1):85-87.
[3]許志,唐碩.基于RTX實時環境的快速原型系統設計[J].西北工業大學學報,2010,28(2):176-181.
[4]李永富,楊鵬,張燕等.基于MATLAB的高級過程控制實時混合仿真平臺[J].系統仿真學報,2007,19(18):4150-4153.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
光學精密工程(2016年6期)2016-11-07 09:07:19
重慶工商大學學報(自然科學版)(2015年10期)2015-12-28 07:43:58
振動、測試與診斷(2014年5期)2014-03-01 01:14:21
