汽車倒車雷達系統的設計
2013-06-23 09:47:40汪曉紅
電子設計工程 2013年17期
汪曉紅
(陜西工業職業技術學院 電氣工程學院,陜西 咸陽 712000)
倒車雷達系統需要對駕駛員盲區內的障礙物進行探測,為駕駛員提供倒車警告和輔助泊車功能[1]。本設計的原理是利用超聲波探測倒車路徑上或附近存在的任何障礙物,并根據盲區內障礙物的距離和方向及時發出危險警報和語音提示。
1 倒車雷達系統的設計原理
1.1 倒車雷達系統的硬件組成
系統硬件由STC12C5A60S2單片機最小系統、GM3101超聲波測距電路、ISD1730語音報警電路、DS18B20測溫電路及顯示電路組成,如圖1所示。
1.2 倒車雷達系統的工作原理
超聲波測距電路控制安裝在車輛尾部三個方位(左右兩側各1個,后側2個)共四路超聲波探頭發射和接收頻率為40 kHz的超聲波[2],根據發送和接收的時間差Δt計算不同方位障礙物的距離d=s×Δt(s為聲速),并根據不同方位障礙物的距離確定危險等級(安全、警告、危險、停車),將不同方位障礙物距離的危險等級、最近障礙物的方位、最近障礙物的距離等信息數據包發送給STC12C5A60S2單片機。
為避免倒車過程中車輛周邊運動物體影響報警信號的準確性,STC12C5A60S2單片機對連續五次所接收到數據進行比對,以最終確定不同方位障礙物距離的危險等級和最近障礙物的方位。對于衡量系統測量精度和測量誤差的關鍵參數--最近障礙物的距離,單片機通過中值濾波算法以減小測量誤差,通過溫度補償算法實時修正環境溫度變化所造成的聲速變化對于測量結果的影響以提高測量精度。最后,單片機控制顯示器顯示最近障礙物的方位和最近障礙物的距離,控制語音處理電路播放對應危險等級的語音提示。
2 倒車雷達系統的硬件設計
2.1 超聲波測距電路設計
GM3101是專用于倒車雷達的超聲波測距芯片,可驅動四路超聲波探頭進行測距,并將檢測到的各探頭到障礙物距離的危險等級、最近障礙物的方位及最近障礙物距離等信息以雙線差分串行方式輸出[3]。其最大測距范圍是0~3.15 m,測量精度0.05 m,工作周期80 ms,輸出信號采用標準異步傳輸格式(波特率4 800 bps、電平5 V)。
圖2 所示為超聲波探頭驅動電路,四路超聲波探頭在GM3101的驅動下巡回發射超聲波并將獲取到的對應方位障礙物的反射波回送給測距芯片GM3101。由圖3所示的超聲波測距電路完成最近障礙物距離計算、最近障礙物確定和方位危險等級判斷。圖中DOUT+、DOUT-為GM3101的差分串行輸出端,MODE為GM3101的工作模式選擇端,與STC12C5A60S2單片機連接實現數據傳輸和模式控制,F9COM、COUT為測試端,用于GM3101的性能測試。
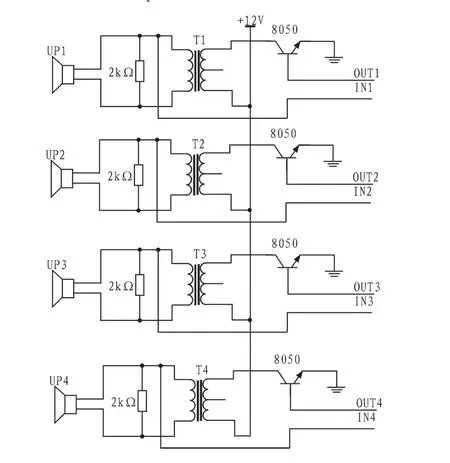
圖2 超聲波探頭驅動電路原理圖Fig.2 Schematic diagram of ultrasonic probe driving circuit
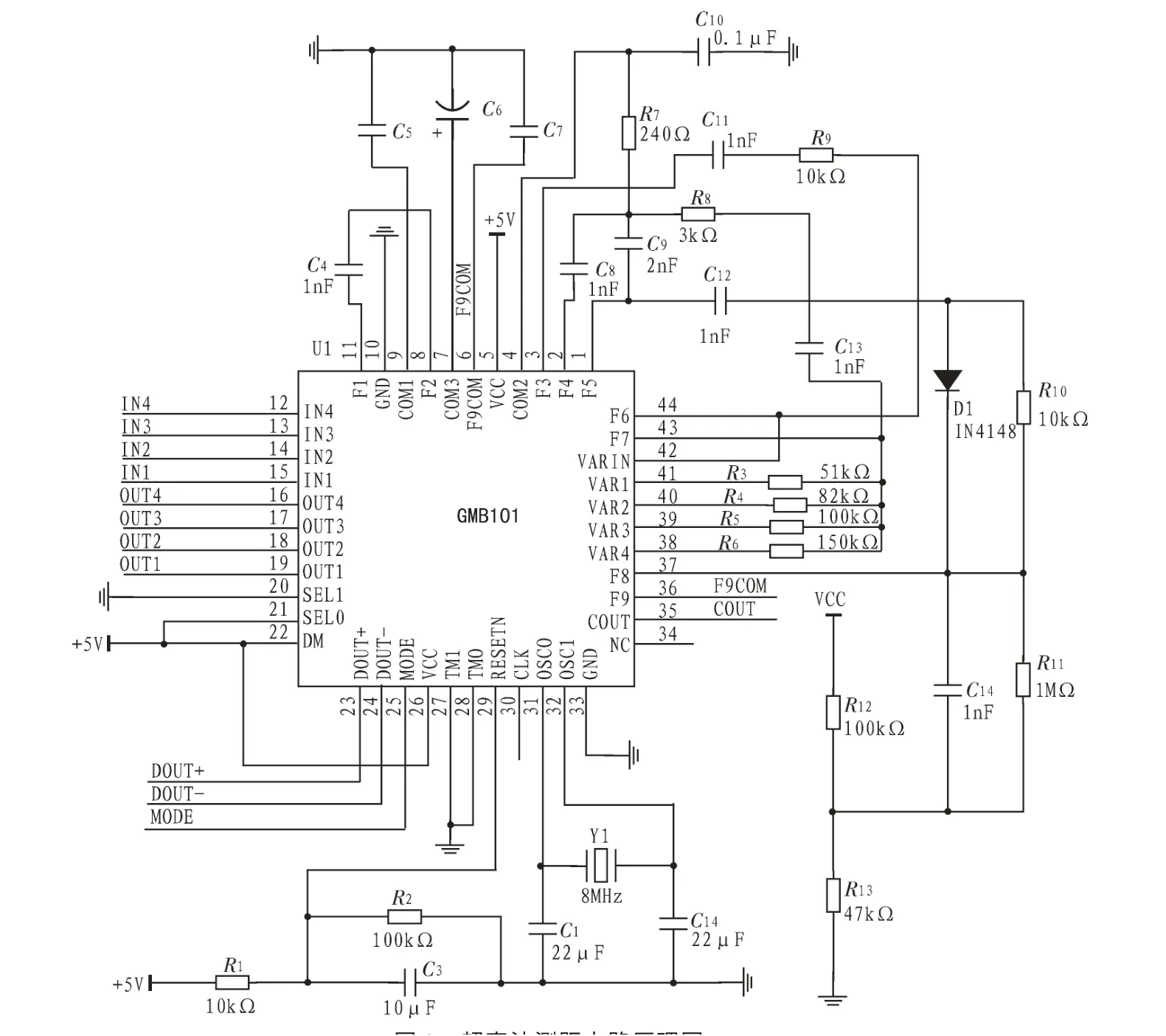
圖3 超聲波測距電路原理圖Fig.3 Schematic diagram of ultrasonic distance measurement circuit
2.2 其他外圍電路設計
除超聲波測距電路外,系統還具有語音報警電路、溫度測量電路和顯示電路等外圍電路。語音報警電路采用優質的的語音錄放芯片ISD1730,可通過SPI接口與STC12C5A60S2單片機連接,外接揚聲器實現多種語音錄放功能控制,處理多達255段語音信息[4]。圖4所示為語音報警電路原理圖。
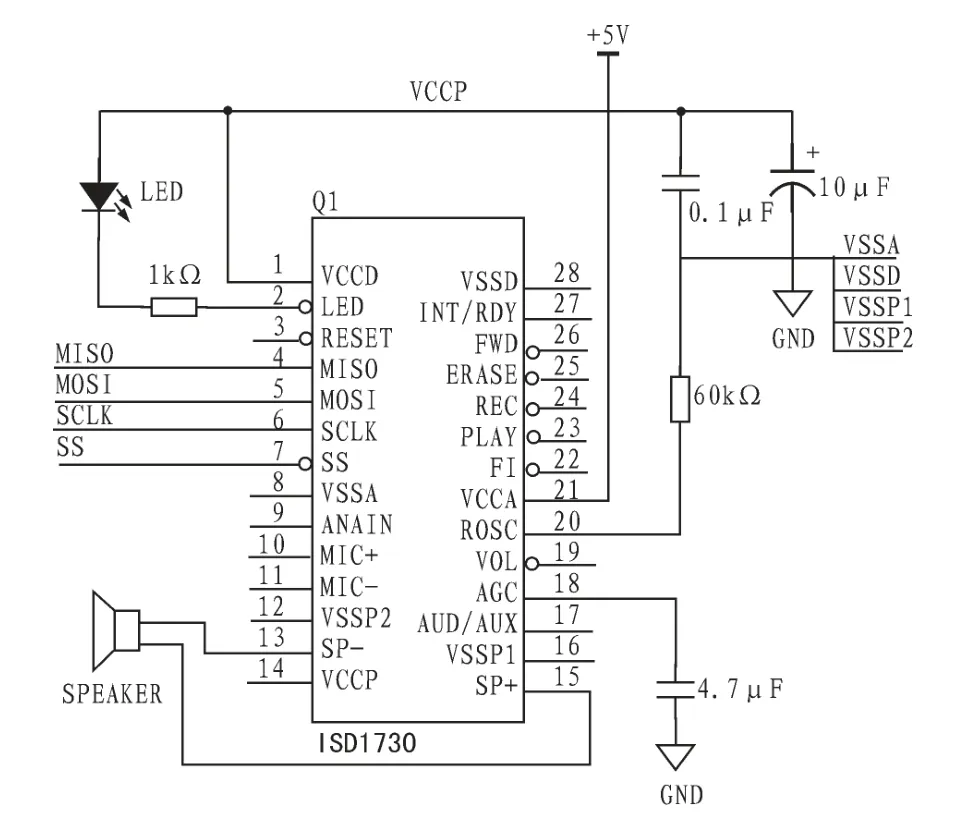
圖4 語音報警電路原理圖Fig.4 Schematic diagram of voice alarming circuit
溫度測量電路采用單總線數字溫度傳感器DS18B20實現測溫[5],顯示電路采用LCD1602字符型液晶顯示器顯示最近障礙物的距離值,電路如圖5所示。
2.3 主控單片機STC12C5A60S2接口設計
系統使用STC12C5A60S2單片機作為主控器件,指令代碼與傳統8051單片機完全兼容,但處理速度是傳統8051單片機的8~12倍,具有44根I/O口線,片內集成60KB 的Flash ROM、1280B的RAM以及SPI、UART、PWM和ADC等多種接口,易于系統集成。圖5為STC12C5A60S2單片機與各外圍電路的的接口設計圖。

圖5 單片機STC12C5A60S2接口設計Fig.5 Schematic diagram of SCM STC12C5A60S2 interface circuit
3 倒車雷達系統的軟件設計
3.1 算法設計
由于倒車過程中周圍運動物體對于測距結果存在干擾可能導致報警信號的準確性下降,而聲波在空氣中的傳播速度受到環境溫度的影響也會測距結果的精度降低。為了抑制此類噪聲的影響,軟件算法中采用了中值濾波和溫度補償進行優化。具體措施是先將GM3101超聲波測距芯片連續5次的測距結果求平均值

考慮到GM3101超聲波測距芯片使用的聲速值為v′=340 m/s,而聲速v與溫度t的關系為v=331.5+0.607t。因此需引入測溫傳感器DS18B20的測量值t進行聲速修正,以最終確定修正后的測距結果S。

3.2 主流程設計
系統的軟件設計采用模塊化程序設計的方法,主要包括系統初始化模塊、測距信息接收模塊、溫度測量模塊、濾波與溫度補償模塊、語音報警輸出模塊及距離顯示輸出模塊,系統主流程如圖6所示。
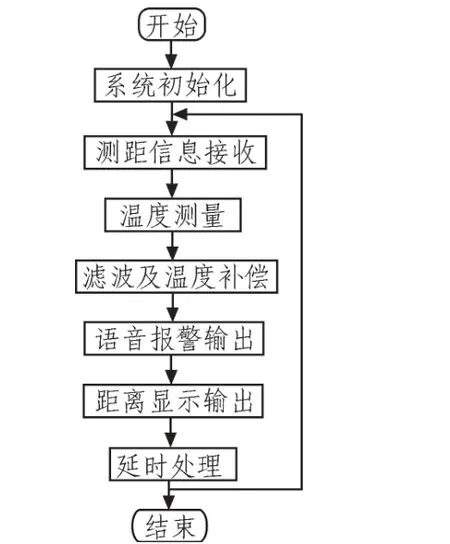
圖6 系統主流程圖Fig.6 Flow chart of the main program
4 結束語
基于在STC12C5A60S2單片機[7-8]的倒車雷達系統經多次試驗改進,已經制作成功。該系統最大測量距離為3.15 m,測量精度為0.05 m,語音報警準確,工作穩定可靠,完全滿足車輛倒車的功能要求。
[1]吳瓊,封維忠,馬文杰.汽車倒車雷達系統的設計與實現[J].現代電子技術,2009(9):191-194.WU Qiong,FENG Wei-zhong,MA Wen-jie.Design and implementation of the automobile reversing radar systerm[J].Modern Electronics Technique,2009(9):191-194.
[2]吳斌方,劉民,熊海濱.超聲波測距傳感器的研制[J].湖北工學院學報,2004(6):26-27.WU Bin-fang,LIU Min,XIONG Hai-bin.Design of supersonic wave distance measuring sensor[J].Journal of Hubei Polytechnic University,2004(6):26-27.
[3]蔡杰.GM8125和GM3101在車輛行駛記錄儀中的應用[J].電子產品世界,2006(11):126-128.CAI Jie.The application of GM8125 and GM3101 in automotive recording systerm[J].Electronic Engineering&Product World,2006(11):126-128.
[4]戴國強,郭高榮,侯霞.基于ISD1700系列語音錄放電路的實現[J].福建電腦,2012(2):146-147.DAI Guo-qiang,GUO Gao-rong,HOU Xia.Voice playback circuit based on ISD1700[J].Fujian Computer,2012(2):146-147.
[5]吉武慶,耿凡娜.基于PROTEUS的單片機測溫系統仿真設計[J].科技信息,2008(16):395-396.JI Wu-qing,GENG Fan-na.The simulation design of MCU temperature measurement systerm based on PROTEUS[J].Scienee&Technology Information,2008(16):395-396.
[6]邱紹峰.凌陽十六位單片機原理及應用[M].西安:西安電子科技大學出版社,2011.
[7]楊艦,紀綠彬.基于STC12C5A60S2的U盤音頻播放器設計[J].電子科技,2011,24(10):24-27.YANG Jian,JI Lv-bin.Design of audio player for USB flash disk based on STC12C5A60S2[J].Electronic Science and Technology,2011,24(10):24-27.
[8]陳衛峰,鄧小穎,呂天文.新型電網電壓監測儀的組成和驅動程序設計[J].現代電子技術,2010,33(3):131-133.CHEN Wei-feng,DENG Xiao-ying,LV Tian-wen.Design and implement of new voltage monitoring instrument based on STCl2C5A60S2[J].Modern Electronics Technique,2010,33(3):131-133.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
電子制作(2019年13期)2020-01-14 03:15:28
裝備制造技術(2019年12期)2019-12-25 03:06:46
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年12期)2018-08-01 00:48:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
