移動機器人動力學控制半物理仿真研究
2013-07-03 00:44:54葉錦華鄭炳坤
計算機工程與設計 2013年4期
葉錦華,鄭炳坤,李 迪,葉 峰
(華南理工大學 機械與汽車工程學院,廣東 廣州 510641)
0 引 言
移動機器人在探索人類無法到達的未知和危險地域優勢突出,已廣泛地應用于工農業、國防等各個領域,對其進行相關技術研究意義重大。運動控制是移動機器人的核心研究內容之一,為了讓其能更接近“完美的速度跟蹤”,應當考慮系統的動力學模型[1]。在控制方法驗證上,采用實際實驗時[2],移動機器人動力學系統的相關參數往往不易測量和調整,不利于控制方法的快速驗證,延長了系統的開發周期,而采用純數值仿真[3],由于無法獲得系統的精確數學模型,往往忽略了實際系統的某些特性和參數,設計的控制器在實際系統中不定可用,為了解決上述問題,本文引入半物理仿真的概念。半物理仿真直接將控制對象連接在仿真系統中,因此也稱之為硬件在環(Hardware-In-The-Loop,HIL)[4]仿真,它是對實際過程進行的實時仿真,由于物理實體被引入到仿真回路中,因此比純數值仿真的置信度高,同時通過合理設計物理實體和仿真系統,可以獲得較為精確的系統模型,并方便系統參數的調整和復雜控制方法的測試,仿真過程結果的驗證直觀,操作簡便。
本文結合Matlab/Simulink仿真軟件與Quanser公司的Q8卡、QuaRC 開發環境和工業機電驅動單元(Industrial Mechatronic Drives Unit,IMDU),以軌跡跟蹤控制為例,建立了(2,0)[5]型輪式移動機器人(WMR)的動力學控制半物理仿真系統,試驗結果表明所設計的系統滿足所需性能指標,達到預期的設計要求。
1 Quanser仿真平臺簡介
Quanser公司的Q8卡[6]是一塊集實時檢測和控制于一體的高性能板卡,它提供了豐富的硬件接口和完善的軟件支持,帶有多路的高速A/D 輸入、高精度D/A 輸出,編碼器輸入、擴展數字I/O和PWM 輸出。Q8卡使用PCI接口連接計算機,并通過終端接口卡連接各種外部設備,形成閉環控制結構。
QuaRC[7]是Quanser的下一代多功能快速控制開發環境,它無縫集成在Simulink中。利用QuaRC提供的框圖模塊,并結合Simulink,用戶可以方便快速地搭建自己的系統模型,然后通過QuaRC自動生成實時代碼,將工業級的實時應用程序下載到Windows或QNX 等操作系統中,還可以通過QuaRC提供的“外部模式”通訊模塊將實時代碼下載到目標板卡上,實現對Quanser板卡的軟件控制。借助Simulink中的各種監測模塊,用戶可以實時觀測整個系統的運行狀態,從而增強了工程的可管理性同時降低了開發成本與時間。
IMDU[8]是一個可模擬各種工業控制單元的裝置系統,每個IMDU 主單元共有四根輸出軸,其中兩根是直流電機驅動軸,其余為自由軸,利用單個或多個IMDU 主單元及其豐富的模塊化組件,可以搭建帶有卷繞控制、間隙與摩擦補償,高階耦合系統等的各種復雜工業控制系統。IMDU提供電機力矩(電流)環的控制和反饋,且每根軸都配有高精度編碼器,IMDU 與Q8終端接口卡使用配套標準數據線進行連接。
2 WMR的動力學模型與控制器
2.1 WMR 動力學模型分析
半物理仿真對象(2,0)型WMR的機械結構如圖1所示,它由車體及兩個獨立驅動輪組成,通過控制兩驅動輪的不同轉速來實現其各種運動形式。建立WMR的慣性坐標系為X0O0Y0,局部坐標系為XcOcYc,Oc位于WMR的質心,θ為WMR的導向角度,v和w分別為WMR的線速度和角速度。兩驅動輪間的距離為2b,輪子半徑為r。
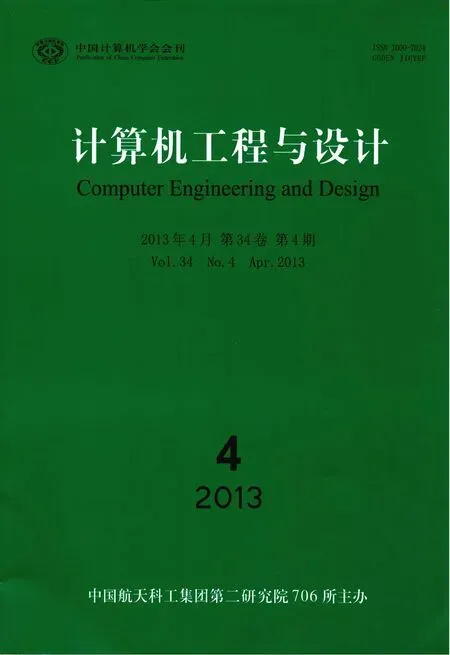
定義WMR的位姿為q=[xcycθc]T,右左輪的轉速為ψ=[φr φl]T,不失一般性,假設WMR 各輪為無變形的剛體,且在水平面運動,同時忽略表面摩擦、向心力和哥氏力,由于各輪受非完整約束,即滿足純滾動和無滑動的條件,其完整運動學及動力學方程可表示為[9]
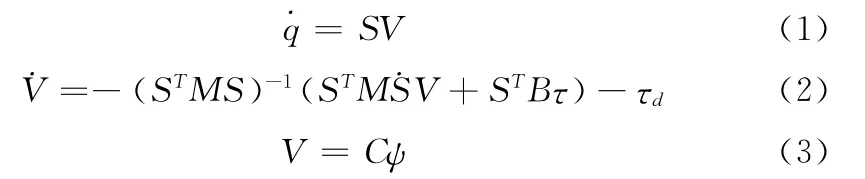
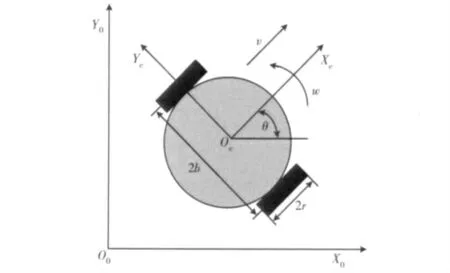
圖1 WMR的結構
式中:S——WMR的廣義Jacobian 矩陣;M ——系統慣性矩陣;V=[v w]T——速度輸入矢量;τd——未知外界擾動;B和C——變換矩陣;τ=[τrτl]T——兩輪控制力矩輸入矢量。各矩陣取為
式中:m——整車質量,I=mb2/4——車體繞質心軸的轉動慣量。
2.2 WMR 軌跡跟蹤動力學控制器
qr滿足如下等式
式中:Vr=[vrwr]T——參考速度輸入矢量,定義跟蹤誤差為
基于反演(Backstepping)方法取得運動學控制器為[10]

式中:kx,ky,kθ——正的常數,采用非線性反饋設計加速度控制輸入u為

式中:kv——正的常數矩陣。最后應用計算力矩法取得兩輪的控制力矩為

控制力矩再轉換為IMDU 直流電機的驅動電流Ic,轉換關系式為

式中:kg——電機輸出到輪軸的減速比,kt——電機力矩常數。
3 半物理仿真系統的軟硬件實現
3.1 系統總體結構
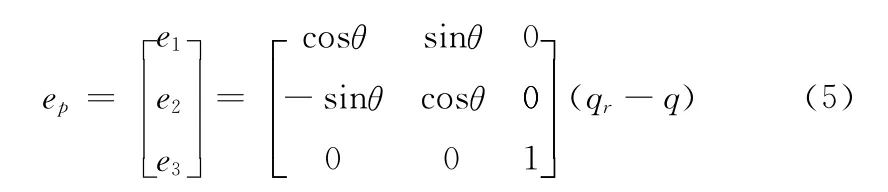
WMR 動力學控制半物理仿真系統總體結構如圖2所示。
圖2 系統總體結構
系統使用IMDU 構建WMR的動力學系統,WMR 軌跡跟蹤的軟件控制在Simulink上實現,并通過QuaRC實現計算機與Q8卡的實時數據交互。Simulink將實時控制過程中計算得到的相關數據傳遞給Q8卡,Q8卡再通過終端接口卡輸出驅動電流給IMDU,實現WMR 兩輪的力矩控制,同時IMDU 通過終端接口卡將電機的實際驅動電流與增量式編碼器信號反饋給Q8卡,經Q8卡處理后,得到WMR力矩和速度反饋值返回給計算機,從而實現WMR 軌跡跟蹤的閉環動力學控制。
3.2 硬件實現
基于IMDU 構建的WMR 動力學系統如圖3所示。
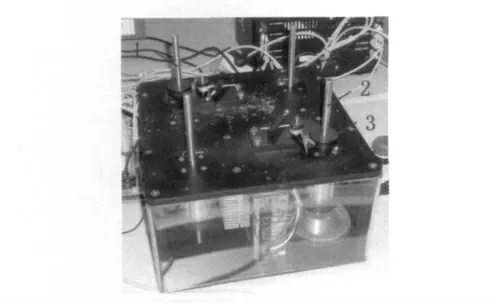
圖3 基于IMDU 構建的WMR 動力學系統
IMDU 兩驅動軸1、2為WMR的轉動輪軸,剎車鼓組件3作為WMR的轉動輪,摩擦制動單元4模擬WMR 車身重量對輪子的壓力,并形成WMR 運動的摩擦阻力,壓力值可通過旋轉組件4的螺絲釘來調節,并可用測力計測得具體數值,定義壓力值為T,則WMR 車身的質量為m=2T/g,式中,g為重力加速度。
3.3 軟件實現
動力學模型下,WMR 軌跡跟蹤控制的總體控制結構如圖4所示,它由三個控制環組成,即位置控制環,速度控制環和電流控制環。
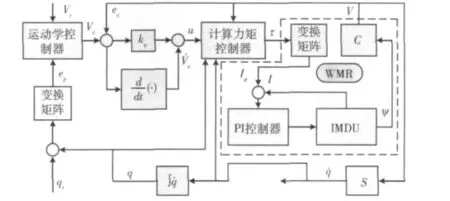
圖4 WMR 軌跡跟蹤控制的總體控制結構
系統運行時,位置控制環根據WMR 反饋位姿取得位置控制偏差ep,并結合參考速度Vr,由運動控制器式(6)得到速度環的參考輸入Vc,然后速度控制環根據IMDU 編碼器反饋獲得的速度反饋值V ,取得速度控制偏差ec,由速度控制器式(7)和計算力矩控制器式(8)得到電流環的參考輸入力矩τ,并經過轉換式(9)得到IMDU的參考輸入電流Ic,最后電流控制環根據IMDU的電流反饋值取得電流控制偏差,并通過PI控制器得到最終IMDU電機的控制輸入電流。IMDU的輸出為兩電機軸即WMR兩輪的轉速ψ,應用式(3)ψ 可轉換為V ,再通過式(1)取得WMR 位姿的變化,最后使用積分運算獲得WMR的當前位姿反饋值。
基于上述控制過程,在Simulink 仿真環境下創建WMR 軌跡跟蹤的半物理仿真模型如圖5所示,它由參考軌跡生成單元、位置控制器、速度控制器、WMR 動力學系統(含電流環)及反饋值計算單元五個部分組成。
系統運行過程中,動態參數如WMR 時變導向角θ 作為仿真模塊的輸入影響整個系統的輸出,不方便使用全局變量來進行傳遞,為了保證動態參數的實時傳遞,實現時變矩陣的動態運算,本文采用S-Function來實現,S-Function提供給用戶自己編寫程序來滿足自己要求模型的接口,可以實現復雜函數信號的生成及Simulink自帶模塊難以實現的信號運算,利用Simulink提供的各種S-Function模板,我們可以很方便實現所需功能的S-Function模塊,并有利于提高程序的運行效率。
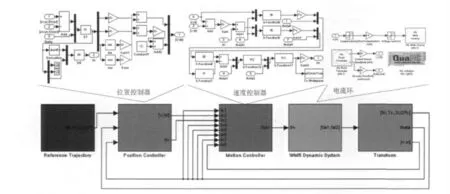
圖5 WMR 軌跡跟蹤的半物理仿真模型
仿真模型運行在RTW 環境下,安裝QuaRC 后,在Simulink參數配置選項卡中,選擇Real-Time WorkShop中的“system target file”為“quarc.windows.tlc”,即可實現以QuaRC Win32為目標的實時仿真。C-MEX S函數是實現RTW的接口,因此在仿真模型中我們使用C 語言形式 的S-Function,完 成 后的S-Function 再 通 過“mex filename.c”方法編譯成filename.mexw32形式的mex文件供系統使用。
4 仿真試驗
圖6所示為整個系統的硬件實物圖,移動機器人的機械模型參數為:r=0.03m,b=0.12m,m=4kg,齒輪減速比為:kg=3,電機力矩常數為:kt=0.0612 N·m/A。本文針對直線和圓弧兩類參考軌跡進行跟蹤試驗。在文中設計的WMR 半物理仿真模型下,我們可以很方便地調整各個參數和控制模塊,并快速取得較為理想的控制參數,試驗取得位置控制器參數為:kx=0.8,ky=1.2,kθ=1;速度控制器參數為:kv=40;直流電機PI控制器參數為:kI=4,kP=2。系統采樣周期為:Δt=0.001s,仿真時間為:t=80s,
直線參考軌跡為:

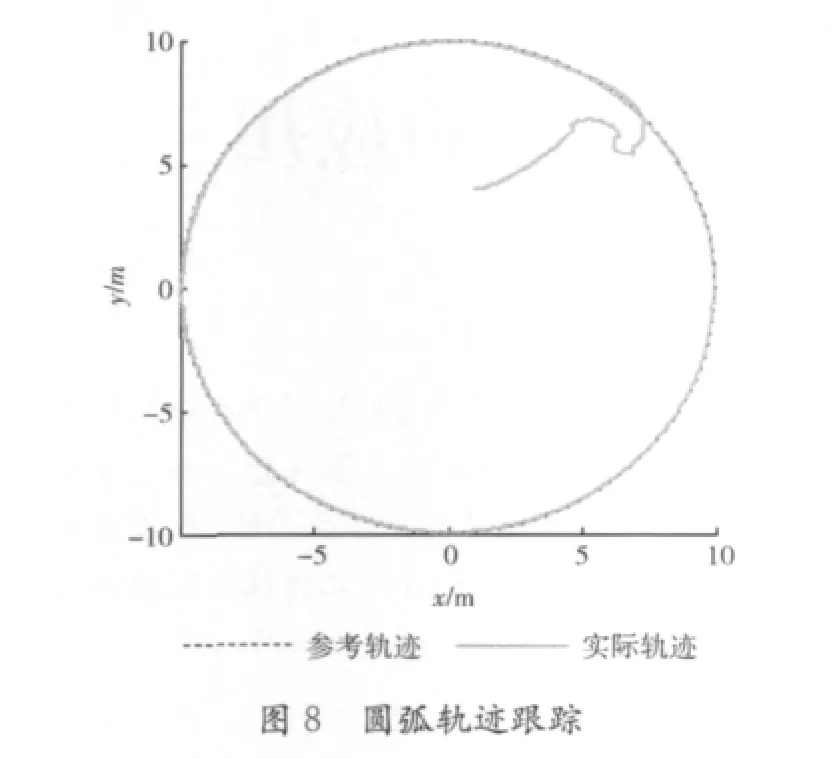
圓參考軌跡為:

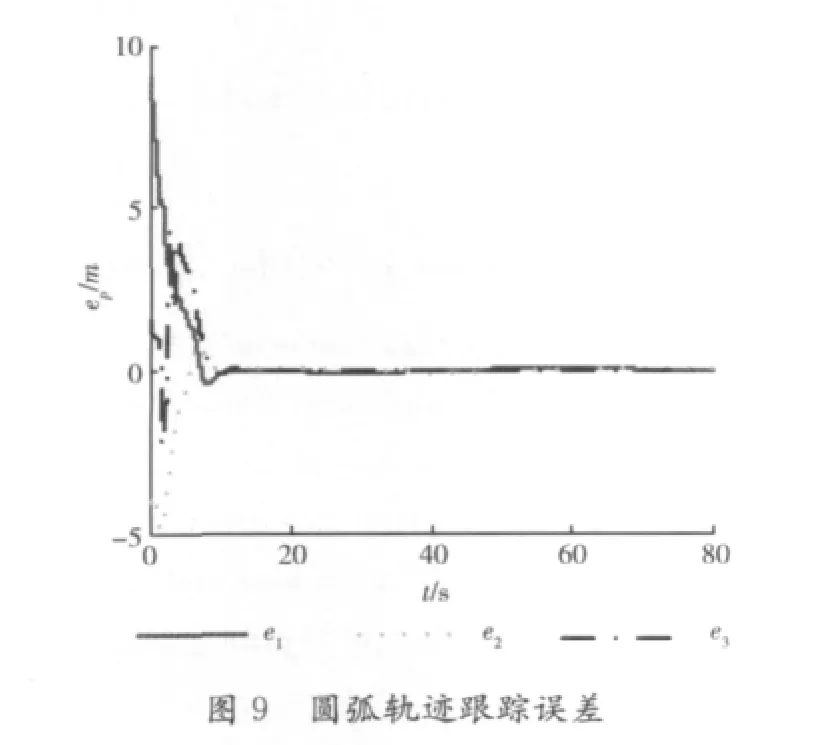
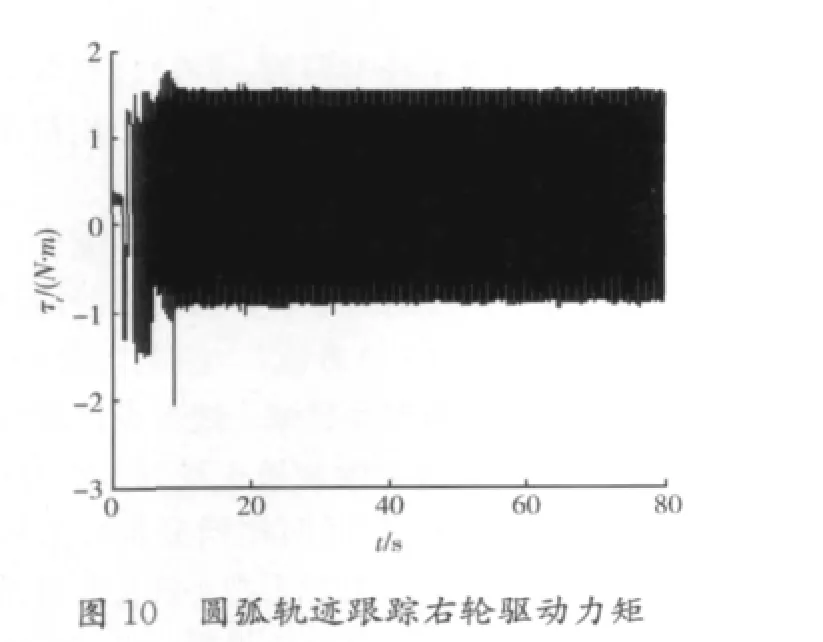
移動機器人起始位姿取:q=(1,4,0)。通過多次試驗,發現系統存在一定的固有誤差,我們直接進行了補償。直線和圓軌跡跟蹤的仿真結果如圖7、圖8所示,圓軌跡跟蹤誤差如圖9 所示,右左輪控制力矩曲線圖分別如圖10、圖11所示,由圖可知,半物理仿真系統較好地反映實際WMR 系統的運行特性,控制器達到較好的控制效果。
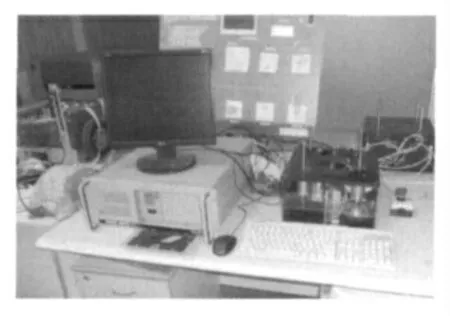
圖6 WMR 半物理仿真系統的硬件實物
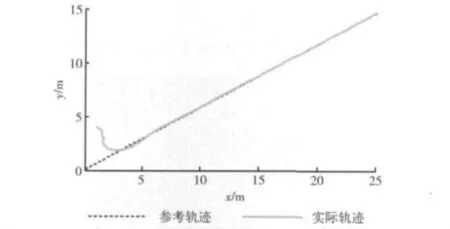
圖7 直線軌跡跟蹤
5 結束語
本文針對WMR 動力學控制實驗研究使用實際系統參數不易測量和調整,而純數值仿真無法完全反映系統特性的不足,提出一種基于Quanser的半物理實時仿真實現方法,該方法使用IMDU 構建WMR 物理系統,利用Simulink和QuaRC實現仿真系統建模,以Q8卡作為通信中介,進行反饋數據采集和物理對象的實時控制,從而實現半物理仿真系統的閉環控制,對WMR 軌跡跟蹤控制試驗表明該方法下,系統較好反映系統真實特性,參數調整方便,操作簡便,驗證過程直觀,有利于各種控制器的快速構建和驗證,方便進行WMR的動力學控制研究。值得一提的是基于本文方法,通過增加IMDU 主單元的個數,還可以實現多機器人的半物理仿真,并可推廣應用到其他多自由度的機器人系統。
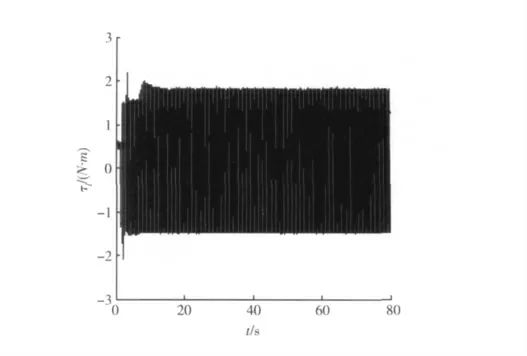
圖11 圓弧軌跡跟蹤左輪驅動力矩
[1]WANG Zongyi,LI Yandong,ZHU Ling.Dual adaptive neural sliding mode control of nonholonomic mobile robot[J].Journal of Mechanical Engineering,2010,46(23):16-21(in Chinese).[王宗義,李艷東,朱玲.非完整移動機器人的雙自適應 神 經 滑模 控 制[J].機 械 工 程 學 報,2010,46(23):16-21.]
[2]Dax T,Kar I N.Design and implementation of an adaptive fuzzy logic-based controller for wheeled mobile robots[J].IEEE Transactions on Control Systems Technology,2006,14(3):501-510.
[3]LIU Yu,ZHOU Chuan,ZHANG Yan,et al.Tracking control of wheeled mobile robots based on RBF neural networks[J].Computer Engineering and Design,2011,32(5):1804-1806(in Chinese).[劉鈺,周川,張燕,等.基于RBF神經網絡的輪式移動機器人軌跡跟蹤控制[J].計算機工程與設計,2011,32(5):1804-1806.]
[4]Shahram K,Philippe P,Shahrokn S.An HIL-based reconfigureable platform for design,implementation and verifycation of electrical system digital controllers[J].IEEE Transactions on Industrial Electronnics,2010,57(4):1226-1236.
[5]YE Jinhua,WU Haibin,CHEN Tianyan.The research on motion controller of mobile robot[J].Machinery Design & Manufacture,2008,6(6):145-147(in Chinese).[葉錦華,吳海彬,陳天炎.移動機器人運動控制系統研究[J].機械設計與制造,2008,6(6):145-147.]
[6]Quanser Consultina.Inc Q8data acquisition system user's guide version 1.2.[Z].Markham,Ontario,Canada:Quanser Consulting,Inc,2007.
[7]Quanser Consultina,Inc Quanser Consultina,Inc.Qua-Rc 1.2User Manual[Z].Markham,Ontario,Canada:Quanser Consulting,Inc,2007.
[8]Industrial mechatronic drives unit(IMDU)user mannual[Z].Markham,Ontario,Canada:Quanser Consulting,Inc,2007.
[9]YE Jinhua,LI Di,YE Feng,et al.Adaptive backstepping sliding mode control of uncertain Nonholonomic AGV[J].Journal of South China University of Technology:Natural Science Edition,2011,39(12):32-37(in Chinese).[葉錦華,李迪,葉峰,等.不確定非完整AGV的自適應反演滑模控制[J].華南理工大學學報(自 然科學版),2011,39(12):32-37.]
[10]CAO Zhengcai,ZHAO Yingtao,WU Qidi.Adaptive trajectory tracking control for a Nonholonomic mobile robot[J].Chinese Journal of Mechanical Engineering,2011,24(3):1-7.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
井岡教育(2022年2期)2022-10-14 03:11:44
北京航空航天大學學報(2022年6期)2022-07-02 01:59:12
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:00
制造技術與機床(2017年3期)2017-06-23 08:11:21
中學生數理化·中考版(2017年12期)2017-04-18 12:55:05
光學精密工程(2016年6期)2016-11-07 09:07:19
中學生(2015年2期)2015-03-01 03:43:33