6-UPS并聯(lián)機(jī)床位姿空間圖譜
2013-07-25 03:36:10陳小崗劉遠(yuǎn)偉吳海兵
中國(guó)機(jī)械工程 2013年10期
關(guān)鍵詞:能力
陳小崗 孫 宇 劉遠(yuǎn)偉 吳海兵
1.南京理工大學(xué),南京,210094 2.淮陰工學(xué)院,淮安,223003
0 引言
與傳統(tǒng)結(jié)構(gòu)形式的數(shù)控機(jī)床相比,采用Stewart平臺(tái)結(jié)構(gòu)形式的六自由度純并聯(lián)機(jī)床被認(rèn)為存在工作空間與機(jī)床體積之比較小,工作空間內(nèi)各點(diǎn)的姿態(tài)能力、誤差、剛度等特性不一致的缺點(diǎn)[1-3]。但該類(lèi)型機(jī)床的工作空間與體積之比小至何種程度,工作空間內(nèi)各點(diǎn)的姿態(tài)能力不一致到何種程度,具有什么樣的分布特性,目前鮮有具體而詳盡的數(shù)據(jù)佐證。
吳海兵等[4]對(duì)Stewart型并聯(lián)機(jī)床的工作空間進(jìn)行了分析計(jì)算,獲得了可達(dá)空間呈陀螺狀的結(jié)論,并給出了圓柱體的推薦工作空間,但未給出兩者相對(duì)于機(jī)床體積的比值,且未對(duì)姿態(tài)能力進(jìn)行研究。趙迎祥等[5]對(duì)6-SPS并聯(lián)機(jī)床工作空間進(jìn)行分析時(shí),考慮了動(dòng)平臺(tái)的姿態(tài)問(wèn)題,并研究了工作空間隨自轉(zhuǎn)角的變化情況。張曙等[1]對(duì)姿態(tài)角對(duì)工作空間的形狀、大小、位置等特性的影響進(jìn)行了研究,此外文獻(xiàn)[6-12]對(duì)Stewart型并聯(lián)機(jī)構(gòu)進(jìn)行了運(yùn)動(dòng)學(xué)正解、位置奇異、姿態(tài)奇異、自運(yùn)動(dòng)等問(wèn)題的研究,但它們均未給出工作空間內(nèi)姿態(tài)能力的具體分布特性。
綜合目前的研究現(xiàn)狀,本文從桿長(zhǎng)約束、轉(zhuǎn)角約束、干涉約束出發(fā),首先對(duì)交叉桿式Stewart型并聯(lián)機(jī)床進(jìn)行了平動(dòng)工作空間計(jì)算,并求取了其最大包容球、最大包容圓柱、最大包容長(zhǎng)方體。然后重新定義了“姿態(tài)能力角”這一概念,計(jì)算了該機(jī)床平動(dòng)工作空間內(nèi)各點(diǎn)處的姿態(tài)能力角,繪制了姿態(tài)能力角分布圖譜,獲得了與刀軸偏擺能力相應(yīng)的姿態(tài)空間。不但更全面地評(píng)價(jià)了工作空間與機(jī)床體積之比,而且獲得了姿態(tài)空間具體而詳細(xì)的分布特性。本文的研究結(jié)果更全面地揭示了并聯(lián)機(jī)床的加工范圍及加工能力。
1 BJ-04-02(A)并聯(lián)機(jī)床運(yùn)動(dòng)學(xué)模型
1.1 并聯(lián)機(jī)床結(jié)構(gòu)簡(jiǎn)圖
本文的研究對(duì)象為BJ-04-02(A)并聯(lián)機(jī)床,其進(jìn)給機(jī)構(gòu)采用6-UPS交叉桿式Stewart平臺(tái)變型結(jié)構(gòu),其中,U副(虎克鉸)用軸線(xiàn)垂直相交的2個(gè)轉(zhuǎn)動(dòng)副等效替代,S副(球鉸)用軸線(xiàn)兩兩垂直且相交于一點(diǎn)的3個(gè)轉(zhuǎn)動(dòng)副等效替代。機(jī)床的三維模型及實(shí)際結(jié)構(gòu)如圖1所示。

圖1 BJ-04-02(A)并聯(lián)機(jī)床
在該機(jī)床上定義2個(gè)坐標(biāo)系:①慣性坐標(biāo)系OA XYZ,其原點(diǎn)在定平臺(tái)上鉸點(diǎn)分布平面的中心,其X軸平行于鉸點(diǎn)A4指向A3的方向,Z軸豎直向上;②隨動(dòng)坐標(biāo)系OB X'Y'Z',其原點(diǎn)在刀具平臺(tái)幾何中心,X'軸平行于鉸點(diǎn)B5指向B3的方向,Z'軸垂直于刀具平臺(tái)表面向上,如圖2所示。
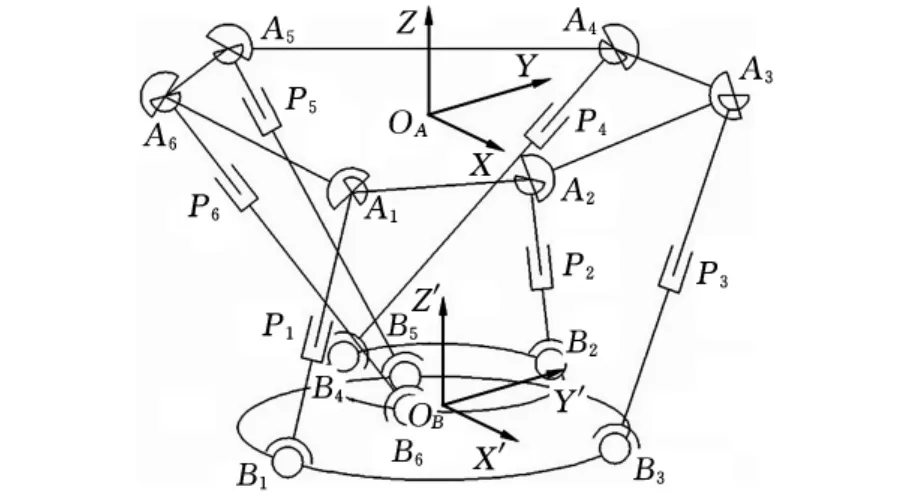
圖2 機(jī)床結(jié)構(gòu)簡(jiǎn)圖
鉸點(diǎn)Ai(i=1,2,…,6)在慣性系中的位置矢量記作ai,鉸點(diǎn)Bi在隨動(dòng)系中的位置矢量記作bi。隨動(dòng)系的原點(diǎn)OB在慣性系中的位置矢量記作rB。隨動(dòng)系在慣性系中的方向余弦矩陣為R。由Ai指向Bi的桿矢量記作Li。上述各矢量間的關(guān)系為

1.2 工作空間的約束條件
在求解并聯(lián)機(jī)床工作空間時(shí),主要考慮桿長(zhǎng)約束、鉸鏈轉(zhuǎn)角約束、驅(qū)動(dòng)桿之間的干涉約束[4-5]。
(1)桿長(zhǎng)約束。機(jī)床的6根驅(qū)動(dòng)桿均有各自的伸縮范圍(極小值與極大值分別為L(zhǎng)min、Lmax)。當(dāng)?shù)毒咂脚_(tái)在工作空間內(nèi)運(yùn)動(dòng)時(shí),6根桿的長(zhǎng)度|Li|必須滿(mǎn)足

(2)轉(zhuǎn)角約束。該機(jī)床的每條支鏈均有5個(gè)轉(zhuǎn)動(dòng)副,按從定平臺(tái)到刀具平臺(tái)的順序,第2、第4轉(zhuǎn)動(dòng)副有轉(zhuǎn)角范圍限制,即驅(qū)動(dòng)桿中心軸線(xiàn)與第1、第5轉(zhuǎn)動(dòng)軸線(xiàn)之間的夾角φ有范圍限制,記其下限值為φmin。當(dāng)?shù)毒咂脚_(tái)在工作空間內(nèi)運(yùn)動(dòng)時(shí),φ必須滿(mǎn)足

(3)干涉約束。6根桿均為圓柱體,其半徑記為R。當(dāng)?shù)毒咂脚_(tái)在工作空間內(nèi)運(yùn)動(dòng)時(shí),6根桿的中心軸線(xiàn)之間的距離Dij(i,j=1,2,…,6,且i≠j)必須滿(mǎn)足

2 位置空間
并聯(lián)機(jī)床的工作空間有最大空間、定向空間、完全空間之分。最大空間是指刀具平臺(tái)以任意姿態(tài)可達(dá)點(diǎn)的集合。定向空間是指刀具平臺(tái)以指定姿態(tài)可達(dá)點(diǎn)的集合。完全空間是指刀具平臺(tái)以所有姿態(tài)均可達(dá)點(diǎn)的集合。定向空間和完全空間都是最大空間的一個(gè)子集。
2.1 位置空間
使固結(jié)于刀具平臺(tái)的隨動(dòng)系的X'、Y'、Z'軸始終分別平行于慣性系的X、Y、Z軸,在該參考姿態(tài)下,刀具平臺(tái)作平動(dòng)可達(dá)點(diǎn)的范圍即為本文所稱(chēng)的位置空間。此時(shí)矩陣 R=I3×3,則式(1)簡(jiǎn)化為

其中,矢量ai和bi可從表1、表2獲得。
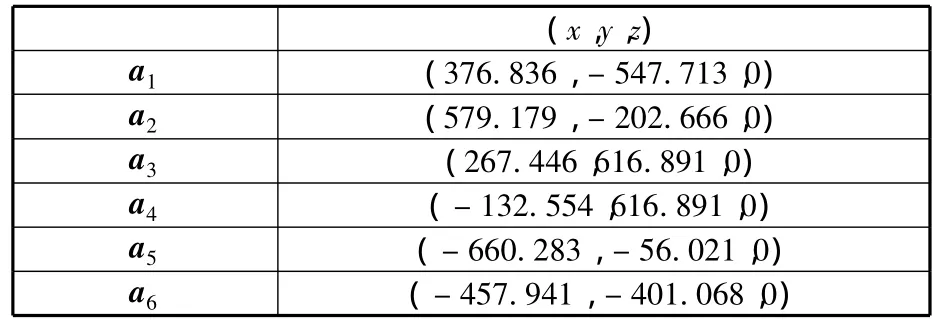
表1 定平臺(tái)鉸點(diǎn)位置參數(shù)表 mm

表2 動(dòng)平臺(tái)鉸點(diǎn)位置參數(shù)表 mm
經(jīng)初步計(jì)算后,判定工作空間在x∈[-500,500]mm,y∈ [-500,500]mm,z∈ [-1400,-400]mm范圍內(nèi)。對(duì)該長(zhǎng)方體形空間,按照X向間隔10mm、Y向間隔10mm、Z向間隔20mm進(jìn)行采樣取點(diǎn)。
對(duì)每一個(gè)采樣點(diǎn),將其位置坐標(biāo)賦予矢量rB,然后根據(jù)式(5)計(jì)算各驅(qū)動(dòng)桿的軸線(xiàn)方向及桿長(zhǎng),并根據(jù)式(2)~式(4)分別判斷是否滿(mǎn)足桿長(zhǎng)、轉(zhuǎn)角、干涉約束。
在對(duì)所有采樣點(diǎn)進(jìn)行計(jì)算、判斷后,獲得平動(dòng)可達(dá)位置空間,如圖3所示。該位置空間由Z方向上的一系列片層組成,為直觀地體現(xiàn)其立體形狀,按照Z(yǔ)坐標(biāo)“由小到大”的順序繪制Z向各層的位置點(diǎn)。
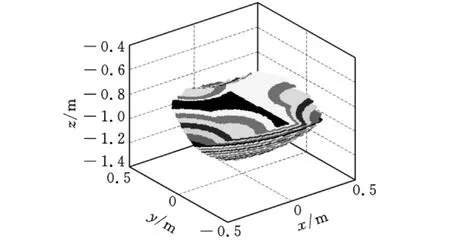
圖3 位置空間
圖3所示的位置空間包含點(diǎn)數(shù)為67 434,占據(jù)的體積約為 0.135m3。機(jī)床外圍體積約為5.86m3,因此該空間與機(jī)床體積之比約為2.30%。
Stewart型并聯(lián)機(jī)床不僅工作空間的絕對(duì)體積小,而且其與機(jī)床體積之比,較之傳統(tǒng)機(jī)床,也是較小的。相關(guān)研究均證實(shí)了這一定性結(jié)論,但給出定量數(shù)據(jù)的很少,且不夠全面。本文基于上述計(jì)算結(jié)果,給出并聯(lián)機(jī)床位置空間的相關(guān)數(shù)據(jù),并將其與串聯(lián)式五軸加工機(jī)床進(jìn)行對(duì)比。
2.2 包容球、包容圓柱、包容長(zhǎng)方體
圖3所示的位置空間上闊下尖,雖然其在XY平面內(nèi)的投影具有一定的三角對(duì)稱(chēng)性,但并不是嚴(yán)格的規(guī)則形體。在利用該機(jī)床進(jìn)行加工的過(guò)程中,圖3所示的空間并不能完全得到利用,一般取其所能包容的最大球、最大圓柱或最大長(zhǎng)方體作為常用工作空間,這三類(lèi)包容體的中心點(diǎn)位置、幾何尺寸、體積及與機(jī)床體積(5.86m3)之比如表3所示。具體工作空間如圖4所示。
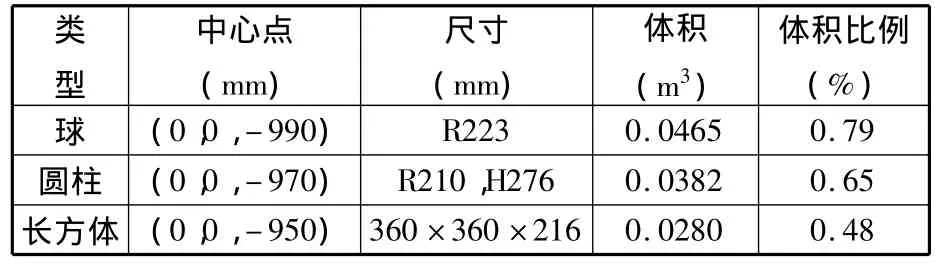
表3 三類(lèi)包容體參數(shù)表
Mikron五軸加工中心UCP800是傳統(tǒng)串聯(lián)結(jié)構(gòu)形式的機(jī)床,其五軸為X、Y、Z、A、C,具有曲面加工能力,其外圍體積約為7.73m3,由X、Y、Z三個(gè)方向的行程獲得其常用工作空間為0.26m3,與機(jī)床體積之比為3.36%。
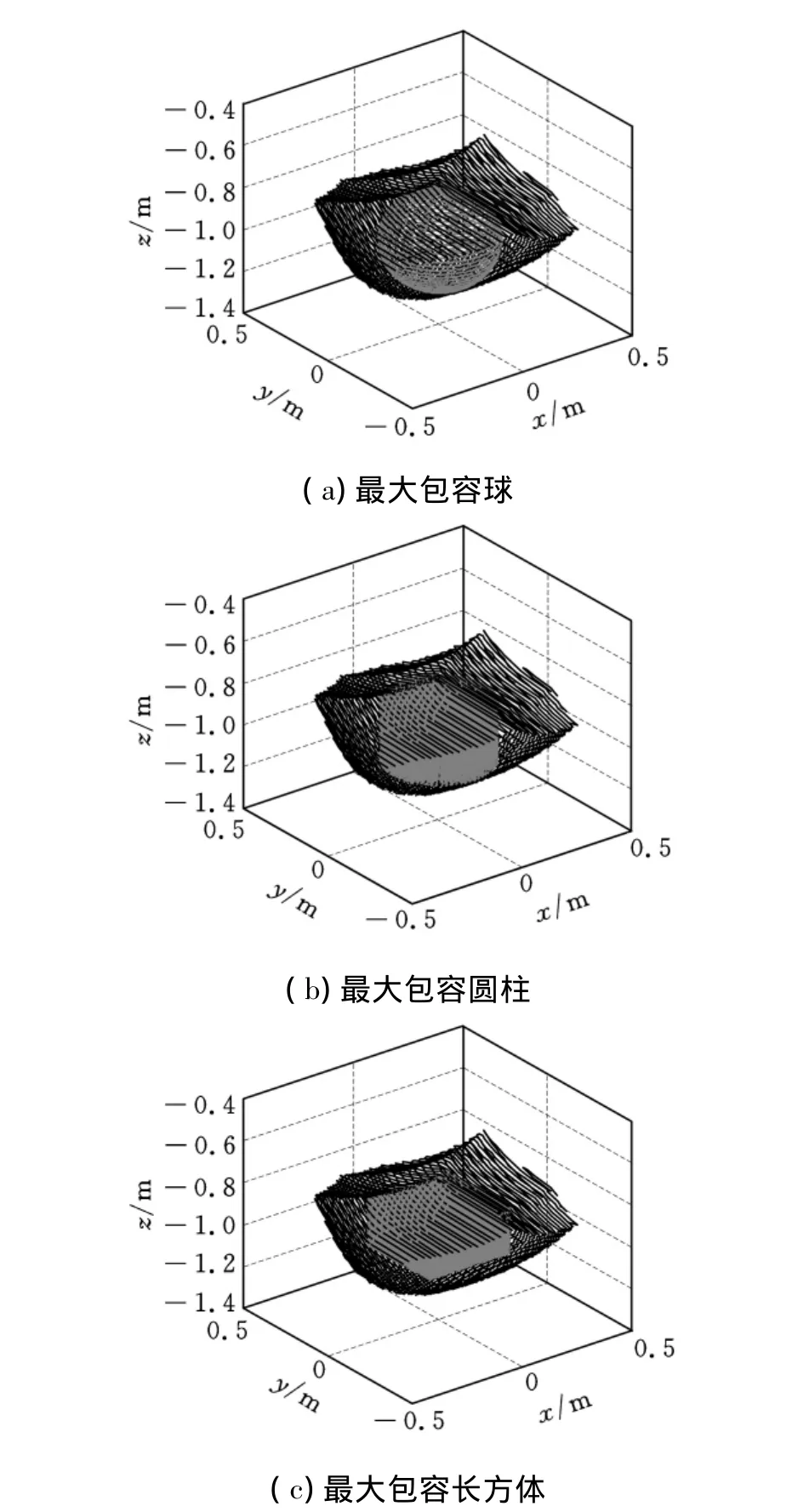
圖4 三種規(guī)則形狀的常用工作空間
與表3對(duì)比可見(jiàn),BJ-04-02(A)并聯(lián)機(jī)床的常用平動(dòng)位置空間與機(jī)床體積之比僅為傳統(tǒng)結(jié)構(gòu)形式機(jī)床的1/7~1/4。
3 姿態(tài)能力角及相應(yīng)的方向余弦矩陣
式(1)中的方向余弦矩陣含有9個(gè)參數(shù),用于描述物體的空間方向和姿態(tài)時(shí)直觀性較差,因此常用3個(gè)角度來(lái)描述物體的空間方向和姿態(tài),如起源于航船姿態(tài)描述的“滾動(dòng)、俯仰、偏航”RPY角以及廣泛應(yīng)用于航海天文的“進(jìn)動(dòng)、章動(dòng)、自旋”歐拉角等[13-14]。
3.1 姿態(tài)能力角
“進(jìn)動(dòng)、章動(dòng)、自旋”歐拉角可描述物體的空間任意姿態(tài),尤其適于描述陀螺的運(yùn)動(dòng),但在機(jī)床控制中,由于需約束刀具平臺(tái)發(fā)生繞刀軸的自旋,因此需約束自旋角使其始終等于進(jìn)動(dòng)角的負(fù)值。
本文采用繞基礎(chǔ)坐標(biāo)系XY平面內(nèi)與X軸成角度ψ的軸線(xiàn)旋轉(zhuǎn)θ角來(lái)描述機(jī)床刀具平臺(tái)的姿態(tài),這種姿態(tài)描述方法直觀性更強(qiáng),也更簡(jiǎn)便,如圖5所示。
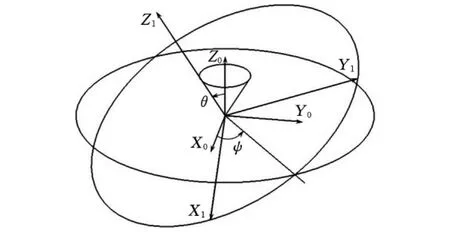
圖5 刀軸偏擺示意圖
在保持刀尖點(diǎn)不動(dòng),利用刀具平臺(tái)的姿態(tài)能力實(shí)現(xiàn)刀軸偏擺時(shí),刀軸的偏擺范圍是以基礎(chǔ)坐標(biāo)系的Z軸為軸線(xiàn)的倒錐形(錐尖在下,錐底面在上)。該倒立圓錐的半錐頂角(θ角)表征了刀軸的偏擺能力。
姿態(tài)能力角:在以Z軸為軸線(xiàn)的360°范圍內(nèi)各方向上,刀軸可達(dá)最大偏擺角的最小值。換言之,即在以Z軸為軸線(xiàn)的360°范圍內(nèi),刀軸向各個(gè)方向偏擺均可達(dá)的角度的最大值。
3.2 方向余弦矩陣
根據(jù)上述(ψ,θ)姿態(tài)描述方法,式(1)中的方向余弦矩陣形式如下[15]:

其中,α、β、γ 為旋轉(zhuǎn)軸線(xiàn)與基礎(chǔ)坐標(biāo)系X、Y、Z軸的夾角,且α=ψ,β=π/2-ψ,γ=π/2。
4 姿態(tài)空間圖譜
對(duì)于圖3所示的位置空間內(nèi)每一點(diǎn),假設(shè)刀具平臺(tái)中心處于該點(diǎn),在桿長(zhǎng)、轉(zhuǎn)角、干涉約束下,計(jì)算刀具平臺(tái)的姿態(tài)能力角,并利用MATLAB繪制其在工作空間內(nèi)的分布,如圖6所示。

圖6 姿態(tài)能力角分布圖
圖6中,按照位置空間內(nèi)各點(diǎn)的Z坐標(biāo)“由小到大”的順序繪制Z向各層的姿態(tài)能力角分布。
依據(jù)圖6所示的計(jì)算結(jié)果,在X、Y、Z方向分別取離散片層,可獲得各層內(nèi)姿態(tài)能力角的分布情況。圖7所示分別為3個(gè)離散層(x=-100mm,y= -60mm,z= -880mm)的姿態(tài)能力角等值圖。
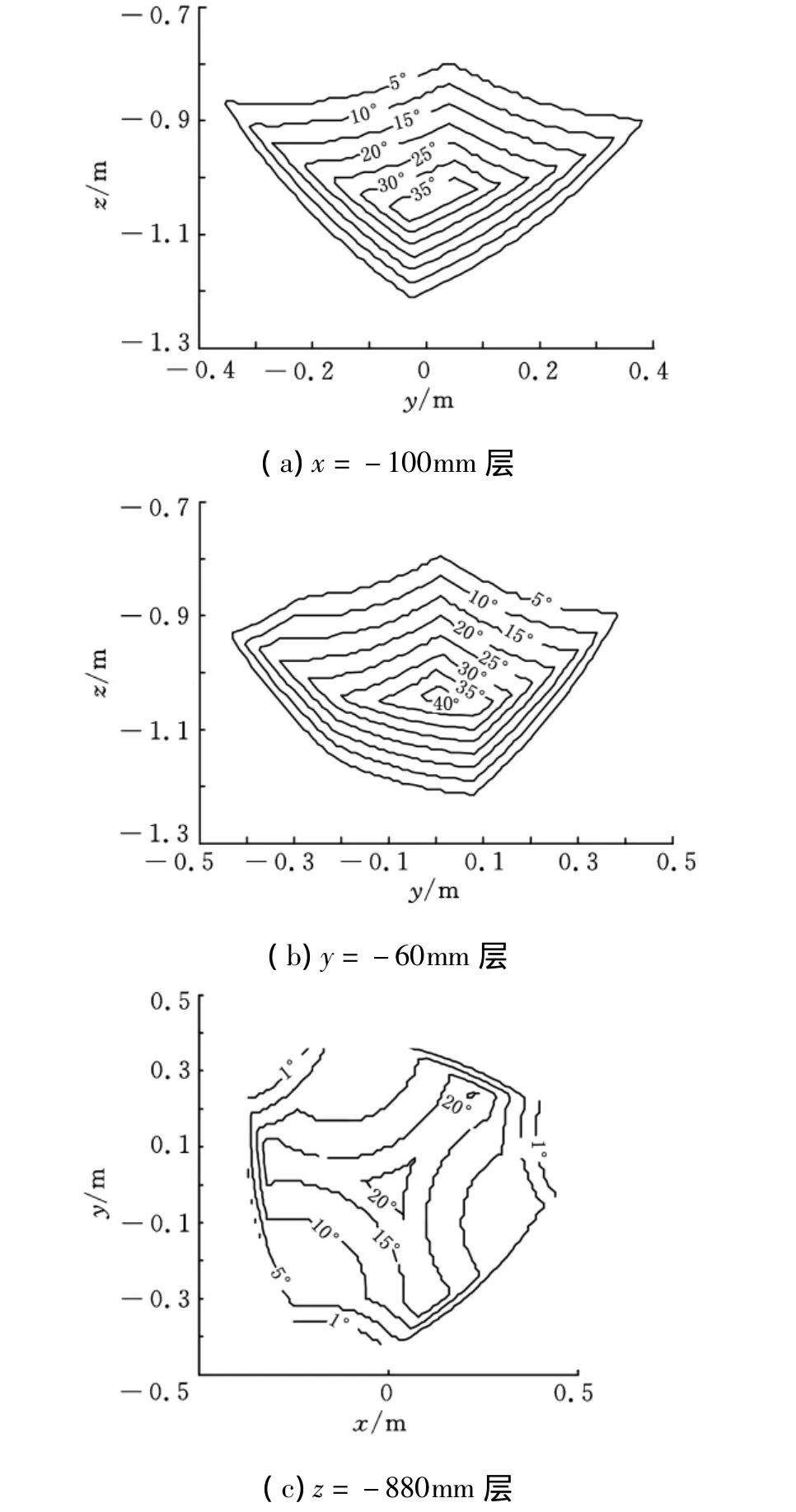
圖7 三個(gè)離散層上的姿態(tài)能力角等值圖
依據(jù)圖6所示的計(jì)算結(jié)果,可獲得任意給定的姿態(tài)能力角所對(duì)應(yīng)的工作空間。分別取姿態(tài)能力角為 5°、15°、25°,相應(yīng)的可達(dá)工作空間及其最大包容球如圖8所示。
姿態(tài)能力角分別取為 5°、10°、15°、20°、25°時(shí),對(duì)應(yīng)工作空間最大包容球、最大包容圓柱及最大包容長(zhǎng)方體的相關(guān)參數(shù)如表4所示(機(jī)床體積為5.86m3)。
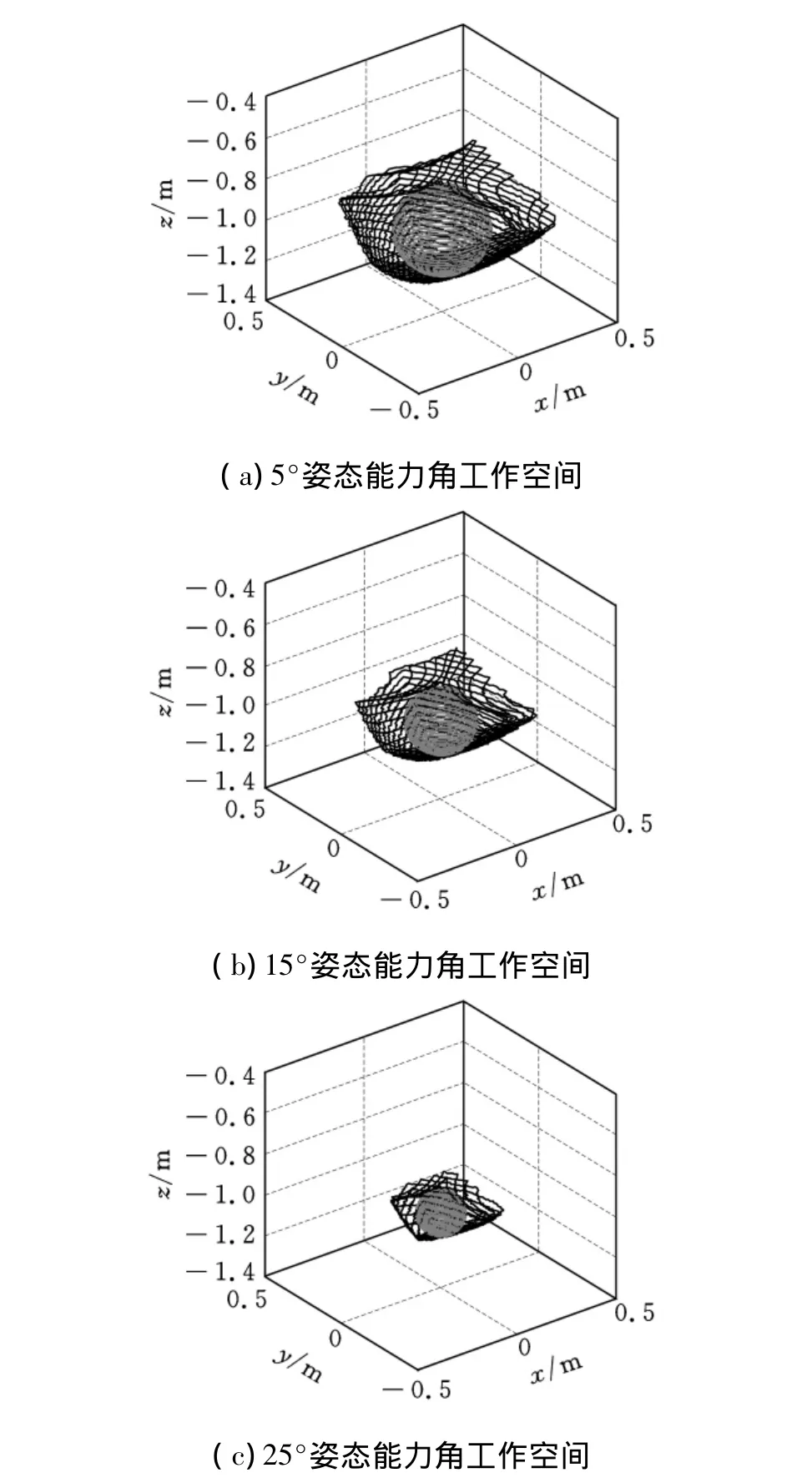
圖8 三個(gè)姿態(tài)能力角對(duì)應(yīng)的工作空間

表4 5°~25°工作空間包容體參數(shù)表
與UCP800相比,5°姿態(tài)能力角對(duì)應(yīng)的常用工作空間與機(jī)床體積之比約為UCP800的1/8~1/6,20°姿態(tài)能力角對(duì)應(yīng)工作空間與機(jī)床體積之比約為 UCP800的1/28~1/22,25°時(shí)則僅為1/56~1/48。
5 結(jié)論
(1)該機(jī)床的工作空間呈陀螺形,上闊下尖,不是嚴(yán)格的規(guī)則體,但其在XY平面內(nèi)的投影有一定的三角對(duì)稱(chēng)性。
(2)參考姿態(tài)下,該機(jī)床的可達(dá)位置空間與機(jī)床體積之比約為2.30%。但對(duì)于規(guī)則形狀(球、圓柱、長(zhǎng)方體)的位置空間,該比值僅為UCP800的1/7~1/4。5°姿態(tài)能力角對(duì)應(yīng)的常用工作空間與機(jī)床體積之比僅為UCP800的1/8~1/6,20°姿態(tài)能力角時(shí)該比值僅為UCP800的1/28~1/22。
(3)在可達(dá)位置空間內(nèi),各點(diǎn)處姿態(tài)能力角的分布具有如下特性:在中心區(qū)域,刀具平臺(tái)的可達(dá)偏角較大,越接近邊緣區(qū)域,可達(dá)偏角越小。
[1]張曙,Heisel U.并聯(lián)運(yùn)動(dòng)機(jī)床[M].北京:機(jī)械工業(yè)出版社,2003.
[2]于大泳,韓俊偉,李洪人.并聯(lián)機(jī)器人位姿誤差分析[J].哈爾濱商業(yè)大學(xué)學(xué)報(bào)(自然科學(xué)版),2004,20(3):278-280.
Yu Dayong,Han Junwei,Li Hongren.Study on Pose Errors Analysis of Parallel Robot[J].Journal of Harbin University of Commerce(Natural Science Edition),2004,20(3):278-280.
[3]李育文,張華,楊建新,等.6-UPS并聯(lián)機(jī)床靜剛度的有限元分析和實(shí)驗(yàn)研究[J].中國(guó)機(jī)械工程,2004,15(2):112-115.
Li Yuwen,Zhang Hua,Yang Jianxin,et al.Finite Element Analysis and Experimental Study for the Stiffnessofa6-UPSParallel Kinematic Machine[J].China Mechanical Engineering,2004,15(2):112-115.
[4]吳海兵,劉遠(yuǎn)偉,左敦穩(wěn).交叉式并聯(lián)機(jī)床工作空間分析[J].機(jī)械科學(xué)與技術(shù),2009,28(4):472-475.
Wu Haibing,Liu Yuanwei,Zuo Dunwen.Workspace A-nalysis of a Cross - legged Parallel Machine Tool[J].Mechanical Science and Technology,2009,28(4):472-475.
[5]趙迎祥,魯開(kāi)講,郭旭俠,等.6-SPS并聯(lián)機(jī)床工作空間分析[J].機(jī)械設(shè)計(jì),2005,22(8):37-39.
Zhao Yingxiang,Lu Kaijiang,Guo Xuxia,et al.Analysis on Working Space of 6-SPS Parallel Machine Tools[J].Journal of Machine Design,2005,22(8):37-39.
[6]Cheng Shili,Wu Hongtao,Wang Chaoqun,et al.A Novel Method for Singularity Analysis of the 6-SPSParallel Mechanisms[J].Science China,2011,54(5):1220-1227.
[7]Cheng Shili,Wu Hongtao,Wang Chaoqun,et al.The Forward Kinematics Analysis of 6-3 Stewart Parallel Mechanisms[J].Intelligent Robotics and Applications,2010,6424:409-417.
[8]Cao Yi,Zhou Hui,Shen Long,et al.Singularity Kinematics Principle and Position-Singularity Analyses of the 6 - 3 Stewart- Gough Parallel Manipulators[J].Journal of Mechanical Science and Technology,2011,25(2):513-522.
[9]Cao Yi,Zhang Qiuju,Zhou Hui,etal.Property Identification of 6-3 Stewart Parallel Manipulators for Special Orientations[J].Intelligent Robotics and Applications,2008,5314:36-45.
[10]Li Baokun,Cao Yi,Huang Zhen,et al.Orientation -singularity and Orientation-workspace Analysis of the Stewart Platform Using Unit Quaternion[J].Intelligent Robotics and Applications,2008,5314:131-140.
[11]Wu Peidong,Wu Changlin,Yu Lianqing.An Method for Forward Kinematics of Stewart Parallel Manipulators[J].Intelligent Robotics and Applications,2008,5314:171-178.
[12]Karger A.Self- motions of 6 -3 Stewart- Gough Type Parallel Manipulators[M]//Lenarcic J,Stconistic M M.Advances in Robot Kinematics:Motion in Man and Machine.Dordrecht:Springer Nether Lands,2010:359-366.
[13]黃田,汪勁松.Gough_Stewart平臺(tái)運(yùn)動(dòng)學(xué)設(shè)計(jì)理論與方法[J].中國(guó)科學(xué)(E 輯),1999,29(4):310-320.
Huang Tian,Wang Jingsong.Theory and Method of Kinematics Design for Gough_Stewart Platform[J].Science in China(Series E),1999,29(4):310-320.
[14]黃真,趙永生,趙鐵石.高等空間機(jī)構(gòu)學(xué)[M].北京:高等教育出版社,2006.
[15]韓建友.高等機(jī)構(gòu)學(xué)[M].北京:機(jī)械工業(yè)出版社,2004.
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2022年6期)2022-06-05 06:50:58
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動(dòng)漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
作文成功之路·小學(xué)版(2020年5期)2020-06-11 12:48:46
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國(guó)生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(shè)(2018年6期)2018-08-16 07:23:10
新高考(英語(yǔ)進(jìn)階)(2018年1期)2018-04-18 14:00:11
文理導(dǎo)航·科普童話(huà)(2017年5期)2018-02-10 19:42:14
